一种机器人自动化搬运装置的制作方法
本技术属于自动化机器人,具体涉及一种机器人自动化搬运装置。
背景技术:
1、搬运车即起搬运货物作用的物流搬运设备。手动托盘搬运车在搬运站使用时将其承载的货叉插入托盘孔内,由人力驱动液压系统来实现托盘货物的起升和下降,并由人力拉动完成搬运作业。它是搬运站托盘运输工具中最简便、最有效、最常见的装卸、搬运工具。
2、公开号cn215755341u公开了一种可供搬运物件的自动化机器人装置,包括承载箱,所述承载箱的下表面固定连接有装置箱,所述装置箱的内底壁固定连接有电动缸,所述电动缸的输出端固定连接有升降板,所述装置箱的内后壁固定连接有电机,所述电机的输出端固定连接有主动轮,所述主动轮的侧表面设置有输送皮带,所述承载箱的内底壁转动连接有输送架。本实用新型,设置有输送皮带和升降板,通过设置有输送皮带可以把车尾处的货物输送到车厢深处提高工作效率,非常的方便,通过设置有升降板,可以把一层的货物升起,承载箱可以继续装载货物,提高空间利用率,可以一次运输更多的货物,工作效率提高。
3、其虽然能够通过输送架和滚筒对货物进行自动输送,可其在货物脱离滚筒后,由于货物的持续输送,其彼此之间容易出现相互牵制的情况,通过输送皮带进行传输无法达到良好的传送效果,容易造成货物堆积于一处的情况,不利于提高承载箱内部空间的利用率,故存在一定的不足。
技术实现思路
1、本实用新型的目的在于提供一种机器人自动化搬运装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案为:
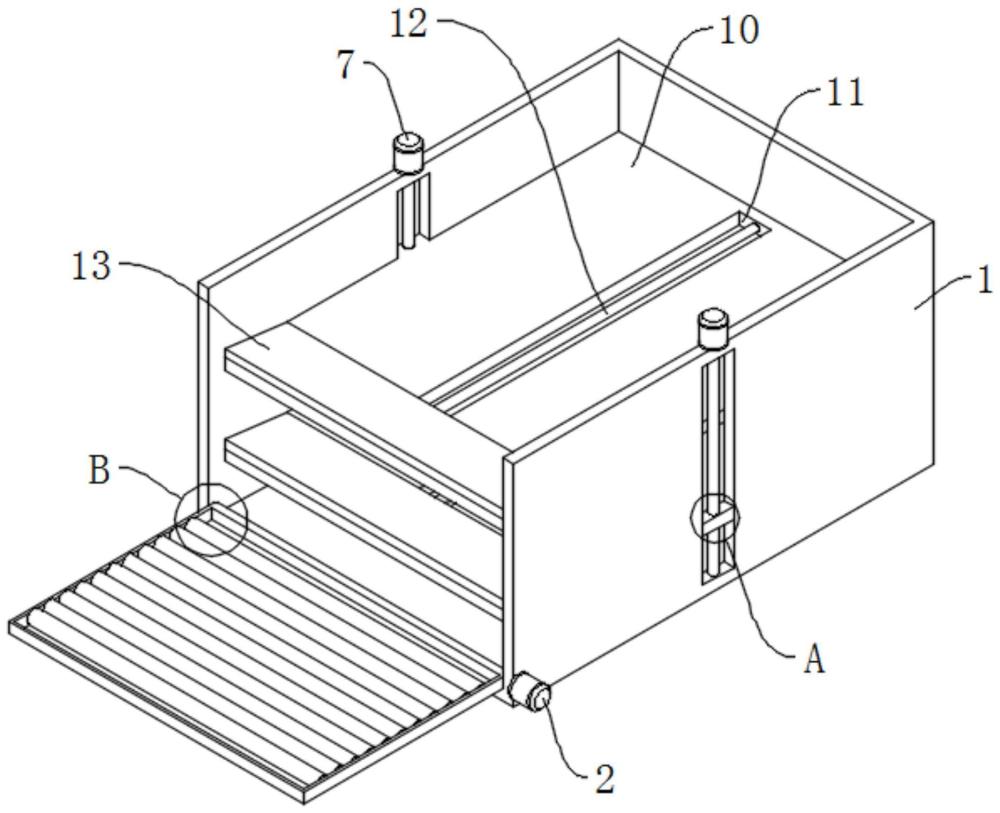
3、一种机器人自动化搬运装置,包括内部竖向对称活动安装有盛放板的承载箱;
4、所述盛放板内居中开设有调节槽二,所述调节槽二内居中设置有滚珠丝杠二,所述滚珠丝杠二的两端均与调节槽二的内壁可旋转连接,且滚珠丝杠二的外缘面上螺纹配合安装有活动块,所述活动块的上端面构造连接有三角形推板,所述三角形推板的表面设置有防滑垫,所述防滑垫的地面与三角形推板的表面粘接固定。
5、进一步地,所述承载箱的内壁两侧均居中开设有调节槽一,且承载箱的上端面两侧均居中设置有电动机二,所述电动机二的下端面与承载箱固定连接。
6、进一步地,所述电动机二通过电机轴连接有可居中旋转安装于调节槽一内的滚珠丝杠一,所述滚珠丝杠一的外缘面上螺纹配合安装有滑块一。
7、进一步地,活动安装于两个所述调节槽一内的滑块一分别与两块盛放板固定连接。
8、进一步地,所述承载箱的一侧底部固定安装有电动机一,所述电动机一通过电机轴连接有可旋转安装于承载箱内的旋转轴。
9、进一步地,所述旋转轴的外缘面上固定安装有圆形套管,所述圆形套管的外缘面上构造设置有输送框,所述输送框内等距可旋转安装有输送辊。
10、与现有技术相比,本实用新型具有如下有益效果:得益于盛放板、调节槽二、滚珠丝杠二以及三角形推板的设置,货物在输送至盛放板上后,通过滚珠丝杠二的旋转可带动活动块进行移动,从而通过活动块带动三角形推板进行移动,通过三角形推板推动货物朝向承载箱内移动,避免货物堆积于一处,且三角形推板的三角形结构能够在侧面为货物提供推力,并配合防滑垫提高对货物的推动效果;
11、得益于承载箱、调节槽一、电动机二、滚珠丝杠一、滑块一以及盛放板的设置,可通过启动电动机二,使得电动机二的电机轴转动带动滚珠丝杠一旋转,从而通过滚珠丝杠一带动滑块一移动,使得盛放板抬升,有利于提高承载箱内部空间的利用率,实用性强。
技术特征:
1.一种机器人自动化搬运装置,包括内部竖向对称活动安装有盛放板(10)的承载箱(1);
2.根据权利要求1所述的一种机器人自动化搬运装置,其特征在于:所述承载箱(1)的内壁两侧均居中开设有调节槽一(6),且承载箱(1)的上端面两侧均居中设置有电动机二(7),所述电动机二(7)的下端面与承载箱(1)固定连接。
3.根据权利要求2所述的一种机器人自动化搬运装置,其特征在于:所述电动机二(7)通过电机轴连接有可居中旋转安装于调节槽一(6)内的滚珠丝杠一(8),所述滚珠丝杠一(8)的外缘面上螺纹配合安装有滑块一(9)。
4.根据权利要求3所述的一种机器人自动化搬运装置,其特征在于:活动安装于两个所述调节槽一(6)内的滑块一(9)分别与两块盛放板(10)固定连接。
5.根据权利要求1所述的一种机器人自动化搬运装置,其特征在于:所述承载箱(1)的一侧底部固定安装有电动机一(2),所述电动机一(2)通过电机轴连接有可旋转安装于承载箱(1)内的旋转轴。
6.根据权利要求5所述的一种机器人自动化搬运装置,其特征在于:所述旋转轴的外缘面上固定安装有圆形套管(3),所述圆形套管(3)的外缘面上构造设置有输送框(4),所述输送框(4)内等距可旋转安装有输送辊(5)。
技术总结
本技术公开了一种机器人自动化搬运装置,包括内部竖向对称活动安装有盛放板的承载箱,所述盛放板内居中开设有调节槽二,所述调节槽二内居中设置有滚珠丝杠二,所述滚珠丝杠二的两端均与调节槽二的内壁可旋转连接,且滚珠丝杠二的外缘面上螺纹配合安装有活动块,所述活动块的上端面构造连接有三角形推板,三角形推板的表面设置有防滑垫,防滑垫的地面与三角形推板的表面粘接固定,承载箱的内壁两侧均居中开设有调节槽一,且承载箱的上端面两侧均居中设置有电动机二,电动机二的下端面与承载箱固定连接,该机器人自动化搬运装置,结构合理,有利于避免货物于一处堆积,且有利于提高承载箱内部空间的利用率,实用性强。
技术研发人员:夏克文,杨宗光,杨贵生,杨顺山,孙同波
受保护的技术使用者:威海晓明机械加工有限公司
技术研发日:20230524
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!