用于玻璃输送装置的夹持机构的清理装置及玻璃输送系统的制作方法
本公开涉及玻璃生产,尤其涉及一种用于玻璃输送装置的夹持机构的清理装置及玻璃输送系统。
背景技术:
1、在玻璃生产过程中,通常利用玻璃输送装置(例如小车)将玻璃(例如tft基板玻璃)输送到后续生产环节,玻璃输送装置上设有夹持机构,在对玻璃进行输送的过程中,利用夹持机构对玻璃进行夹持固定。
2、在输送过程中,由于玻璃温度较高,玻璃表面会与夹持机构粘连,在玻璃卸载后,可能会有玻璃碎片残留在夹持机构上。残留的玻璃碎片会对后续夹持稳定性造成影响并对玻璃造成损伤。
3、中国专利cn215031486u公开了一种tft-lcd液晶玻璃传送小车夹子清洁装置,其利用刮刷机构和吸尘装置对小车夹子上的附着异物进行清理。该专利所公开的清洁装置的结构较为复杂,并且在该专利的技术方案中,未判断何时进行清理工作。如果依赖人工判断清理时机,会存在难以判断、影响效率以及判断易出错的问题。如果在每次输送玻璃前都对夹持机构进行清理(即便附着物极少并不需要清理),则会影响生产效率并造成能耗浪费。
4、基于此,现有技术仍存在进一步改进的空间。
技术实现思路
1、本公开所要解决的一个技术问题是:现有技术的清理装置结构较为复杂以及未判断清理时机。
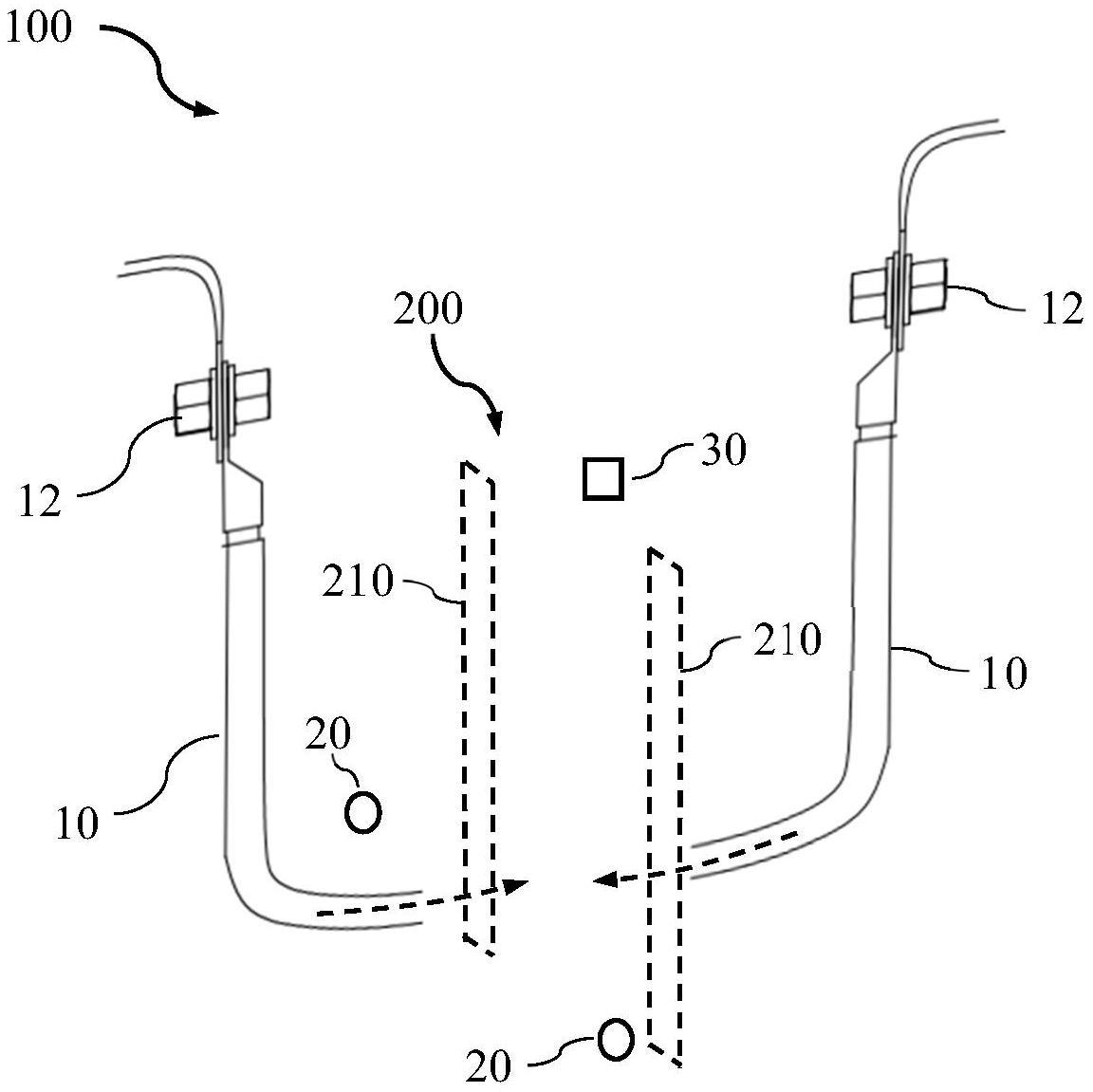
2、为解决上述技术问题,本公开实施例提供一种用于玻璃输送装置的夹持机构的清理装置,包括:吹送管道,吹送管道上设有电磁阀,吹送管道配置为向处于打开状态的夹持机构的两个夹持部之间的空间吹送压缩气体;两个激光传感器,配置为分别检测处于打开状态的夹持机构的两个夹持部的内侧表面是否存在异物;或者接近传感器,配置为检测处于闭合状态的夹持机构的夹持部是否回到闭合位置;以及控制部,与电磁阀、激光传感器和接近传感器均通信连接。
3、在一些实施例中,清理装置设置在玻璃输送装置的返程轨道上的清理工位处。
4、在一些实施例中,当玻璃输送装置位于清理工位时,两个激光传感器发出的激光分别贴近并平行于处于打开状态的夹持机构的两个夹持部的内侧表面,或者,接近传感器设置在夹持部的闭合位置附近。
5、在一些实施例中,吹送管道的数量为两个,两个吹送管道相对设置。
6、在一些实施例中,两个激光传感器发出的激光之间的距离为20~30mm;和/或激光传感器的精度至少为0.5mm。
7、在一些实施例中,检测夹持部是否回到闭合位置,包括:检测夹持部的底座是否回到闭合位置。
8、在一些实施例中,当玻璃输送装置用于输送的玻璃厚度小于1mm时,清理装置包括激光传感器并且不包括接近传感器。
9、在一些实施例中,当玻璃输送装置用于输送的玻璃厚度大于等于1mm时,清理装置包括激光传感器或接近传感器。
10、本公开实施例还提供一种玻璃输送系统,包括:玻璃输送装置,配置为沿预定路径移动并具有用于夹持玻璃的夹持机构,夹持机构具有两个夹持部;以及根据以上任一实施例的清理装置。
11、在一些实施例中,还包括去程轨道以及返程轨道,玻璃输送装置沿去程轨道和返程轨道移动,返程轨道上设有清理工位。
12、通过上述技术方案,本公开提供的清理装置具有更加简单的结构,并且能够自动准确地判断清理时机以及自动清理异物,可以保证玻璃品质、提高生产效率。
技术特征:
1.一种用于玻璃输送装置的夹持机构(200)的清理装置(100),其特征在于,包括:
2.根据权利要求1所述的装置,其特征在于,所述清理装置(100)设置在所述玻璃输送装置的返程轨道上的清理工位处。
3.根据权利要求2所述的装置,其特征在于,当所述玻璃输送装置位于所述清理工位时,两个所述激光传感器(20)发出的激光分别贴近并平行于处于打开状态的所述夹持机构(200)的两个所述夹持部(210)的内侧表面,或者,所述接近传感器(30)设置在所述夹持部(210)的所述闭合位置附近。
4.根据权利要求1所述的装置,其特征在于,所述吹送管道(10)的数量为两个,两个所述吹送管道(10)相对设置。
5.根据权利要求1所述的装置,其特征在于,两个所述激光传感器(20)发出的激光之间的距离为20~30mm;和/或所述激光传感器(20)的精度至少为0.5mm。
6.根据权利要求1所述的装置,其特征在于,检测所述夹持部(210)是否回到闭合位置,包括:检测所述夹持部(210)的底座(212)是否回到闭合位置。
7.根据权利要求1所述的装置,其特征在于,当所述玻璃输送装置用于输送的玻璃厚度小于1mm时,所述清理装置(100)包括所述激光传感器(20)并且不包括所述接近传感器(30)。
8.根据权利要求1所述的装置,其特征在于,当所述玻璃输送装置用于输送的玻璃厚度大于等于1mm时,所述清理装置(100)包括所述激光传感器(20)或所述接近传感器(30)。
9.一种玻璃输送系统,其特征在于,包括:
10.根据权利要求9所述的系统,其特征在于,还包括去程轨道以及返程轨道,所述玻璃输送装置沿所述去程轨道和所述返程轨道移动,所述返程轨道上设有清理工位。
技术总结
本公开提供一种用于玻璃输送装置的夹持机构的清理装置及玻璃输送系统。清理装置包括:吹送管道,吹送管道上设有电磁阀,吹送管道配置为向处于打开状态的夹持机构的两个夹持部之间的空间吹送压缩气体;两个激光传感器,配置为分别检测处于打开状态的夹持机构的两个夹持部的内侧表面是否存在异物;或者接近传感器,配置为检测处于闭合状态的夹持机构的夹持部是否回到闭合位置;以及控制部,与电磁阀、激光传感器和接近传感器均通信连接。本公开能够自动地判断清理时机及清理异物,可以保证玻璃品质、提高生产效率,还能简化结构。
技术研发人员:李青,李赫然,唐旭东,胡恒广,李志军,何永敢
受保护的技术使用者:河北光兴半导体技术有限公司
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!