一种移载运输机器人的制作方法
本技术涉及运输机器人的,特别是涉及一种移载运输机器人。
背景技术:
1、agv小车/叉车是指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车,一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作,经检索公告号为cn211470673u专利文件中,提供了一种搬运机器人,包括底盘、上装机构和锁紧机构,底盘能够按照预定路线自动行走;上装机构包括至少两个用于运输不同物料的上装;锁紧机构包括第一锁紧组件和第二锁紧组件,第一锁紧组件安装在底盘上,第二锁紧组件安装在上装上;底盘通过锁紧机构可选择地与至少两个上装中的任意一个可拆卸的固定连接,通过锁紧机构能够在底盘上择一安装实现运输不同物料的上装,底盘能够按照预定路线自动行走,从而能够满足不同物料的运输需求,降低人工成本,但其使用过程中发现,由于货物的重量不同,在货物摆放不均时,会导致左右两侧的重量出现偏差,容易造成装置出现倾翻的现象,导致装置的使用稳定性较差。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种避免了装置在转运过程中,因左右两侧货物重量不同而出现倾翻,提高其使用稳定性的移载运输机器人。
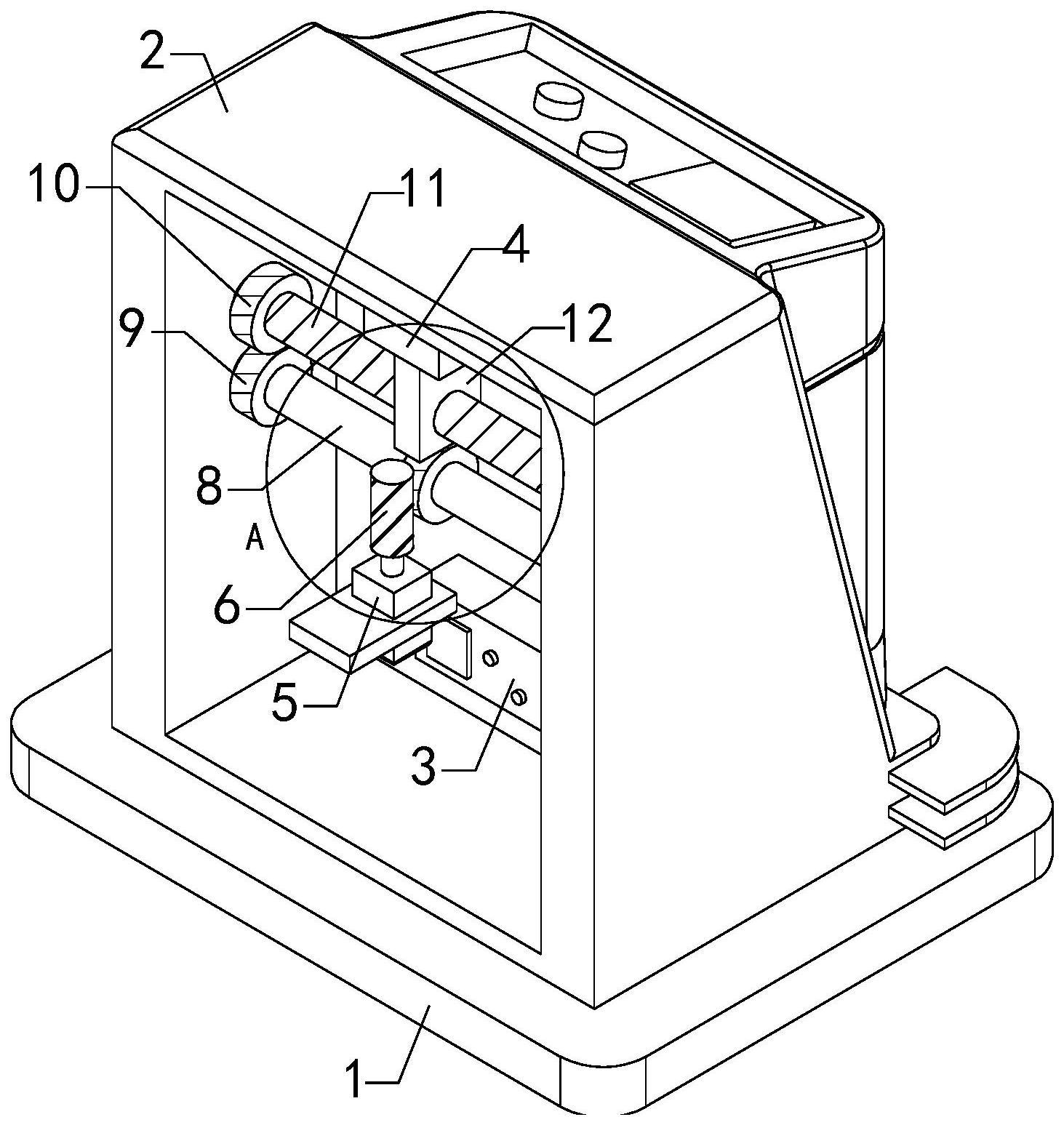
2、本实用新型的一种移载运输机器人,包括底盘和运输机器人本体,运输机器人本体固定在底盘上,底盘能够按照预定路线行走,并且运输机器人本体上设置有叉车架,还包括微处理器、动力机构和配重块,运输机器人本体的叉车上设置有压力传感器,压力传感器与微处理器电性连接,微处理器安装在运输机器人本体前端的内侧壁上,并且微处理器与动力机构电性连接,动力机构安装在运输机器人本体内部,动力机构用于带动配重块左右移动,配重块与运输机器人本体顶端内侧壁滑动卡装;通过运输机器人本体将货物叉起,此时运输机器人本体叉车架上的压力传感器对货物重量进行判断,并且压力传感器将信号传递到微处理器,此时微处理器对信息进行处理判断运输机器人本体叉车架左右两侧的重量是否平衡,若不平衡,微处理器会控制动力机构,通过动力机构带动配重块向较轻的一侧移动,直至左右两侧达到平衡状态,避免了装置在转运过程中,因左右两侧货物重量不同而出现倾翻,提高装置的使用稳定性。
3、优选的,动力机构包括伺服电机、蜗杆、蜗轮、转动轴、两组第一齿轮、两组第二齿轮、往复丝杠和滑块,伺服电机固定在运输机器人本体后端内侧壁上,伺服电机与微处理器电性连接,并且伺服电机的输出端与蜗杆连接,蜗杆与蜗轮啮合传动连接,蜗轮固定在转动轴的中部,并且转动轴与运输机器人本体的左右两端内侧壁转动连接,两组第一齿轮分别对称固定在转动轴的左右两侧,第一齿轮与第二齿轮啮合传动连接,并且两组第二齿轮分别对称固定在往复丝杠的左右两侧,往复丝杠与运输机器人本体左右两端的内侧壁转动连接,并且往复丝杠位于转动轴的上方,滑块与往复丝杠螺装连接,配重块固定在滑块的顶端;通过微处理器启动伺服电机,使得伺服电机带动蜗杆转动,蜗杆与蜗轮啮合传动连接,从而使得转动轴带动第一齿轮转动,第一齿轮与第二齿轮啮合传动连接,进而使得往复丝杠转动,并使得滑块带动配重块左右移动,便于根据运输机器人本体叉车架上货物的重量调节配重块的位置,为配重块的移动提供动力。
4、优选的,还包括多组散热片,多组散热片分别均匀固定在运输机器人本体后端的中部;通过设置散热片,便于运输机器人本体内部热量的快速散发,避免运输机器人本体内部零部件受热老化,提高装置的使用寿命。
5、优选的,伺服电机为消音电机;通过设置消音电机,减小噪音污染,提高装置的使用效果。
6、优选的,蜗杆与蜗轮以及第一齿轮与第二齿轮之间均涂有润滑油;通过涂抹润滑油,减小蜗杆与蜗轮以及第一齿轮与第二齿轮之间的摩擦损耗,进一步提高装置的使用寿命。
7、优选的,运输机器人本体的材质为不锈钢;通过设置不锈钢材质,提高装置的机构强度,提高装置的使用寿命。
8、与现有技术相比本实用新型的有益效果为:通过运输机器人本体将货物叉起,此时运输机器人本体叉车架上的压力传感器对货物重量进行判断,并且压力传感器将信号传递到微处理器,此时微处理器对信息进行处理判断运输机器人本体叉车架左右两侧的重量是否平衡,若不平衡,微处理器会控制动力机构,通过动力机构带动配重块向较轻的一侧移动,直至左右两侧达到平衡状态,避免了装置在转运过程中,因左右两侧货物重量不同而出现倾翻,提高装置的使用稳定性。
技术特征:
1.一种移载运输机器人,包括底盘(1)和运输机器人本体(2),运输机器人本体(2)固定在底盘(1)上,底盘(1)能够按照预定路线行走,并且运输机器人本体(2)上设置有叉车架,其特征在于,还包括微处理器(3)、动力机构和配重块(4),运输机器人本体(2)的叉车上设置有压力传感器,压力传感器与微处理器(3)电性连接,微处理器(3)安装在运输机器人本体(2)前端的内侧壁上,并且微处理器(3)与动力机构电性连接,动力机构安装在运输机器人本体(2)内部,动力机构用于带动配重块(4)左右移动,配重块(4)与运输机器人本体(2)顶端内侧壁滑动卡装。
2.如权利要求1所述的一种移载运输机器人,其特征在于,动力机构包括伺服电机(5)、蜗杆(6)、蜗轮(7)、转动轴(8)、两组第一齿轮(9)、两组第二齿轮(10)、往复丝杠(11)和滑块(12),伺服电机(5)固定在运输机器人本体(2)后端内侧壁上,伺服电机(5)与微处理器(3)电性连接,并且伺服电机(5)的输出端与蜗杆(6)连接,蜗杆(6)与蜗轮(7)啮合传动连接,蜗轮(7)固定在转动轴(8)的中部,并且转动轴(8)与运输机器人本体(2)的左右两端内侧壁转动连接,两组第一齿轮(9)分别对称固定在转动轴(8)的左右两侧,第一齿轮(9)与第二齿轮(10)啮合传动连接,并且两组第二齿轮(10)分别对称固定在往复丝杠(11)的左右两侧,往复丝杠(11)与运输机器人本体(2)左右两端的内侧壁转动连接,并且往复丝杠(11)位于转动轴(8)的上方,滑块(12)与往复丝杠(11)螺装连接,配重块(4)固定在滑块(12)的顶端。
3.如权利要求1所述的一种移载运输机器人,其特征在于,还包括多组散热片(13),多组散热片(13)分别均匀固定在运输机器人本体(2)后端的中部。
4.如权利要求2所述的一种移载运输机器人,其特征在于,伺服电机(5)为消音电机。
5.如权利要求2所述的一种移载运输机器人,其特征在于,蜗杆(6)与蜗轮(7)以及第一齿轮(9)与第二齿轮(10)之间均涂有润滑油。
6.如权利要求1所述的一种移载运输机器人,其特征在于,运输机器人本体(2)的材质为不锈钢。
技术总结
本技术涉及运输机器人的技术领域,特别是涉及一种移载运输机器人,其避免了装置在转运过程中,因左右两侧货物重量不同而出现倾翻,提高装置的使用稳定性;包括底盘和运输机器人本体,运输机器人本体固定在底盘上,底盘能够按照预定路线行走,并且运输机器人本体上设置有叉车架,还包括微处理器、动力机构和配重块,运输机器人本体的叉车上设置有压力传感器,压力传感器与微处理器电性连接,微处理器安装在运输机器人本体前端的内侧壁上,并且微处理器与动力机构电性连接,动力机构安装在运输机器人本体内部,动力机构用于带动配重块左右移动,配重块与运输机器人本体顶端内侧壁滑动卡装。
技术研发人员:尹昌宝,窦志强,尹国凯
受保护的技术使用者:山东领创工业设计有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!