给袋式真空包装机上袋机构的制作方法
本技术涉及上袋转接过程的协调实用性,更具体的公开了给袋式真空包装机上袋机构。
背景技术:
1、现有结构在从袋箱中真空取袋后下拉到一定高度停止,然后夹袋摇臂摆动带动夹袋爪过来夹取包装袋。这样就必须要求夹袋爪开口很大,夹袋爪的两片夹袋片离被夹袋口有很大距离,袋口在两夹片中间,在夹袋时袋口偏向一固定夹片,易造成上袋不稳定有偏移和高低不一等现象发生。
技术实现思路
1、本实用新型主要解决的技术问题是提供给袋式真空包装机上袋机构,能够解决袋口偏移和高低不一的问题。
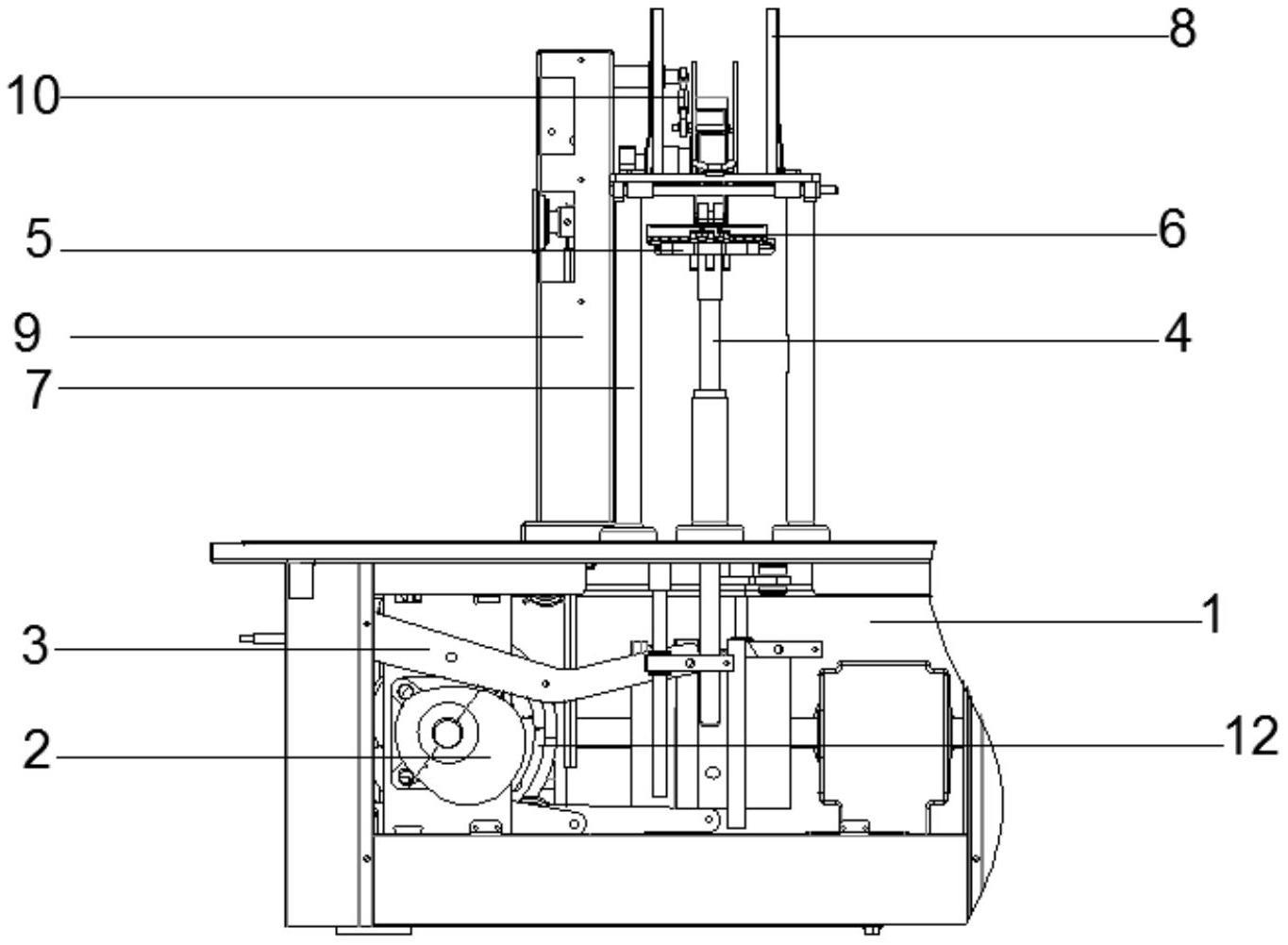
2、为解决上述技术问题,根据本实用新型的一个方面,更具体的说是给袋式真空包装机上袋机构,包括上袋机主体,所述上袋机主体的内底部前方左侧固定有电机,所述电机的输出轴前端固定有取袋凸轮,所述取袋凸轮的上方设有取袋凸轮摇臂,所述取袋凸轮摇臂的左边转动连接于所述上袋机主体的内部左侧壁上方,所述上袋机主体的顶部前方穿设有取袋摇杆,所述取袋摇杆的下方外侧壁与所述取袋凸轮摇臂的右方转动相连,所述取袋摇杆的顶端固定有取袋吸盘固定板,所述取袋吸盘固定板的上方固定有多个取袋吸盘,所述上袋机主体顶部前方位于所述取袋摇杆的左右两边对称固定有支柱,所述支柱的顶端固定有袋箱,所述上袋机主体的顶部中间左边固定有夹袋主体,所述夹袋主体的右侧上方转动连接有夹袋臂,所述夹袋臂的下方前部对称固定有夹袋板。
3、更进一步的,所述取袋吸盘固定板与所述袋箱的位置相对应。
4、更进一步的,所述取袋吸盘的数量为三个。
5、更进一步的,所述取袋吸盘升起的最高高度与所述袋箱底部的高度相同。
6、更进一步的,所述取袋吸盘取袋完成回升高度前所述夹袋臂摆动使所述夹袋板运动到袋口即将到达的位置。
7、本实用新型给袋式真空包装机上袋机构的有益效果为:取袋吸盘取袋时,取袋摇杆下拉一定高度,取袋完成后取袋臂再回升一定距离,在取袋臂回升到指定位置前,夹袋臂摆动使夹袋板运动到袋口即将到达的位置,从而保证取袋臂回升位置后,包装袋代扣与夹袋板紧密贴合,避免产生上袋不稳定有偏移和高低不一等现象。
技术特征:
1.给袋式真空包装机上袋机构,包括上袋机主体(1),其特征在于:所述上袋机主体(1)的内底部前方左侧固定有电机(12),所述电机(12)的输出轴前端固定有取袋凸轮(2),所述取袋凸轮(2)的上方设有取袋凸轮摇臂(3),所述取袋凸轮摇臂(3)的左边转动连接于所述上袋机主体(1)的内部左侧壁上方,所述上袋机主体(1)的顶部前方穿设有取袋摇杆(4),所述取袋摇杆(4)的下方外侧壁与所述取袋凸轮摇臂(3)的右方转动相连,所述取袋摇杆(4)的顶端固定有取袋吸盘固定板(5),所述取袋吸盘固定板(5)的上方固定有多个取袋吸盘(6),所述上袋机主体(1)顶部前方位于所述取袋摇杆(4)的左右两边对称固定有支柱(7),所述支柱(7)的顶端固定有袋箱(8),所述上袋机主体(1)的顶部中间左边固定有夹袋主体(9),所述夹袋主体(9)的右侧上方转动连接有夹袋臂(10),所述夹袋臂(10)的下方前部对称固定有夹袋板(11)。
2.根据权利要求1所述的给袋式真空包装机上袋机构,其特征在于:所述取袋吸盘固定板(5)与所述袋箱(8)的位置相对应。
3.根据权利要求1所述的给袋式真空包装机上袋机构,其特征在于:所述取袋吸盘(6)的数量为三个。
4.根据权利要求1所述的给袋式真空包装机上袋机构,其特征在于:所述取袋吸盘(6)升起的最高高度与所述袋箱(8)底部的高度相同。
5.根据权利要求1所述的给袋式真空包装机上袋机构,其特征在于:所述取袋吸盘(6)取袋完成回升至指定位置前所述夹袋臂(10)摆动使所述夹袋板(11)运动到到袋口即将到达的位置。
技术总结
本技术涉及上袋转接过程的协调实用性技术领域,且公开了给袋式真空包装机上袋机构,包括上袋机主体,所述上袋机主体的内底部前方左侧固定有电机,所述电机的输出轴前端固定有取袋凸轮,所述取袋凸轮的上方设有取袋凸轮摇臂,所述取袋凸轮摇臂的左边转动连接于所述上袋机主体的内部左侧壁上方,所述上袋机主体的顶部前方穿设有取袋摇杆。取袋吸盘取袋时,取袋摇杆下拉一定高度,取袋完成后取袋臂再回升一定距离,在取袋臂回升到指定位置前,夹袋臂摆动使夹袋板运动到袋口即将到达的位置,从而保证取袋臂回升位置后,包装袋代扣与夹袋板紧密贴合,避免产生上袋不稳定有偏移和高低不一等现象。
技术研发人员:刘在升,刘炳亮,刘海龙
受保护的技术使用者:山东宸欧自动化科技有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!