一种PPU搬运机构的制作方法
本技术涉及两工位搬运,具体为一种ppu搬运机构。
背景技术:
1、ppu意为并车与保护单元。ppu是physics processing unit的简称,中文意思为物理运算处理器。
2、在运用于ppu物理处理器按照编程对机械设备进行设定时,机械设备会按照ppu的设定,进行规律机械运动。而当在机械两工位搬运领域中,当对物料进行搬运时,往往会伴有纵向和横向两个方向的运动,而针对该搬运行程,需要两个气缸才能实现该操作,并且气缸运行速度慢,极大的降低了搬运设备的搬运效率。由此设计一种ppu搬运机构以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种ppu搬运机构,以解决上述背景技术中提出的现有ppu处理器操控气缸搬运效率低的问题。
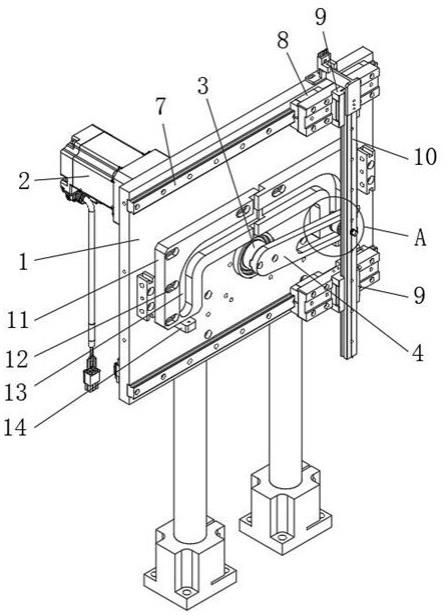
2、为实现上述目的,本实用新型提供如下技术方案:一种ppu搬运机构,包括安装板,所述安装板后端安装有伺服电机,其伺服电机的输出轴通过联轴器与连杆相连接,所述连杆远离联轴器一端内活动设有活动辊轴,其活动辊轴中间穿插有转轴,转轴上设有外轴承和内轴承;
3、所述安装板上下端设有两组横向滑轨,横向滑轨上活动设有横向滑块,两组横向滑块上均匀设有纵向滑轨,且两组纵向滑轨上活动设有摆臂;
4、所述安装板前端面中间设有相对称的两组轨道板,轨道板上开设有多组调节螺孔,且轨道板内开设有轨道槽,轨道板于两侧下端设有支撑架。
5、优选的,所述连杆远离联轴器一端开设有活动槽,所述外轴承活动于该活动槽内。
6、优选的,所述轨道槽为圆弧的“l”形结构,且两组轨道槽拼接后为倒“u”形轨道,内轴承活动于倒“u”形轨道内。
7、优选的,所述活动辊轴外端通过螺栓固定于摆臂上,且摆臂通过活动辊轴、连杆与伺服电机构成联动结构。
8、优选的,所述摆臂于纵向滑轨上作上下升降活动运动,摆臂于横向滑轨上作左右移动运动。
9、优选的,所述两组轨道板拼接处为相互错位的“l”形结构,且两组轨道板拼接处闭合后构成完整的平整面。
10、与现有技术相比,本实用新型的有益效果是:该ppu搬运机构采用单一的伺服电机驱动,相较于两组气缸驱动设备生产成本较低,并且伺服电机驱动相较于气缸驱动效率高,另外两组轨道板拼接的搬运轨道可以微调,能够适用于更多搬运行程的需求。
技术特征:
1.一种ppu搬运机构,包括安装板(1),所述安装板(1)后端安装有伺服电机(2),其伺服电机(2)的输出轴通过联轴器(3)与连杆(4)相连接,其特征在于:所述连杆(4)远离联轴器(3)一端内活动设有活动辊轴(15),其活动辊轴(15)中间穿插有转轴,转轴上设有外轴承(5)和内轴承(6);
2.根据权利要求1所述的一种ppu搬运机构,其特征在于:所述连杆(4)远离联轴器(3)一端开设有活动槽,所述外轴承(5)活动于该活动槽内。
3.根据权利要求1所述的一种ppu搬运机构,其特征在于:所述轨道槽(13)为圆弧的“l”形结构,且两组轨道槽(13)拼接后为倒“u”形轨道,内轴承(6)活动于倒“u”形轨道内。
4.根据权利要求1所述的一种ppu搬运机构,其特征在于:所述活动辊轴(15)外端通过螺栓固定于摆臂(10)上,且摆臂(10)通过活动辊轴(15)、连杆(4)与伺服电机(2)构成联动结构。
5.根据权利要求1所述的一种ppu搬运机构,其特征在于:所述摆臂(10)于纵向滑轨(9)上作上下升降活动运动,摆臂(10)于横向滑轨(7)上作左右移动运动。
6.根据权利要求1所述的一种ppu搬运机构,其特征在于:所述两组轨道板(11)拼接处为相互错位的“l”形结构,且两组轨道板(11)拼接处闭合后构成完整的平整面。
技术总结
本技术涉及两工位搬运技术领域,具体为一种PPU搬运机构,包括安装板,所述安装板后端安装有伺服电机,其伺服电机的输出轴通过联轴器与连杆相连接,所述连杆远离联轴器一端内活动设有活动辊轴,其活动辊轴中间穿插有转轴,转轴上设有外轴承和内轴承,所述安装板上下端设有两组横向滑轨,横向滑轨上活动设有横向滑块,两组横向滑块上均匀设有纵向滑轨,且两组纵向滑轨上活动设有摆臂。该PPU搬运机构采用单一的伺服电机驱动,相较于两组气缸驱动设备生产成本较低,并且伺服电机驱动相较于气缸驱动效率高,另外两组轨道板拼接的搬运轨道可以微调,能够适用于更多搬运行程的需求。
技术研发人员:苏尚雄,薛子斌,白佳生
受保护的技术使用者:苏州翎登自动化设备有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!