可伸缩收袋机构及智能垃圾桶的制作方法
本技术属于智能垃圾桶,尤其涉及一种可伸缩收袋机构及智能垃圾桶。
背景技术:
1、目前市场上的智能垃圾桶一般采用交叉设置的两根收纳杆直线往复运动的方式将垃圾袋的袋口进行收拢,然后再进行封袋打包。如授权公告号为cn209684520u的中国袋体6专利公开了一种垃圾袋收口机构、自动打包机构及智能垃圾桶,该垃圾袋收口机构包括相互交叉设置的收袋压杆和收口封袋压杆,在驱动装置的驱动下,收袋压杆和收口封袋压杆分别沿收袋丝杆和收口封袋丝杆往复直线运动,以将垃圾袋收拢和压紧,并复位。该机构的收袋压杆和收口封袋压杆为单点受力,在收拢垃圾袋时,容易造成受力不均匀和压杆变形,而且压杆的长度固定不变,不便于应用在不同形状的垃圾桶上。
技术实现思路
1、鉴于现有技术存在的上述至少一个问题,本实用新型实施例提供一种可伸缩收袋机构及智能垃圾桶。
2、本实用新型实施例采用的技术方案是,一种可伸缩收袋机构,包括:
3、旋转臂,设于桶体的桶腔内,所述旋转臂的第一端与所述桶腔的腔壁转动连接;
4、导滑槽,沿所述桶腔的腔壁的周向设置;
5、驱动机构,设于所述导滑槽内,且所述驱动机构启动时能够沿所述导滑槽移动;
6、伸缩臂,活动设于所述旋转臂上,且其第一端与所述驱动机构连接,以在所述驱动机构启动时能够带动所述伸缩臂沿所述旋转臂移动,以调节所述伸缩臂伸出所述旋转臂的第一端的长度,且带动所述伸缩臂和所述旋转臂一起转动,对置于所述桶腔内的袋体的袋口进行收拢。
7、本实用新型实施例的可伸缩收袋机构通过转动的方式对桶体内的袋口进行收拢,且在收拢的过程中,驱动机构可以带动伸缩臂伸缩,以调节由旋转臂和伸缩臂所构成的收拢部件的总长度,以适配不同形状的桶腔,收拢不同形状的袋口。
8、可选实施例中,所述驱动机构包括电机和驱动轮,所述导滑槽的槽壁上设有导向齿;所述电机的机壳固定于所述伸缩臂的第一端,所述驱动轮固定于所述电机的输出轴上并与所述导向齿保持啮合,所述电机启动时能够带动所述驱动轮转动并沿所述导向齿移动。该驱动机构的结构合理,不仅能够沿导滑槽移动,还能够在移动的过程中拉动伸缩臂伸缩,以适配桶腔的形状。
9、可选实施例中,所述驱动机构还包括导向轮,所述导向轮转动连接于所述电机的输出轴上,并限位于所述导滑槽内,所述导向轮在所述电机的带动下能够沿所述导滑槽移动。通过设置导向轮,能够将驱动机构限位于导滑槽上,以使驱动轮能够始终与导向齿保持啮合,提升整体结构的稳定性。
10、可选实施例中,所述旋转臂包括第一臂部和第二臂部,所述第一臂部的长度小于与所述第二臂部的长度,所述第一臂部与所述第二臂部连接形成l形,所述第一臂部的自由端与所述桶腔的腔壁转动连接;所述伸缩臂的第一端由所述第二臂部的自由端向外伸出,并能够在所述驱动机构的带动下调节伸出的长度。结构合理,空间占用小,收拢效果好。
11、可选实施例中,所述旋转臂包括分别呈l形的上盖和底壳,所述上盖扣合于所述底壳上,并与所述底壳围成容腔,所述伸缩臂的第一端伸出容腔外与所述电机的机壳连接,所述伸缩臂的第二端设于所述容腔内。旋转臂结构合理,便于伸缩臂设置,且为伸缩臂的缩回提供容纳空间。
12、可选实施例中,所述容腔内设有导向杆和用于对所述导向杆的运动进行导向和限位的限位部件,所述导向杆与所述伸缩臂平行且并列设置,所述导向杆的一端伸出所述容腔并固定于所述伸缩臂的第一端的端头上,所述导向杆的另一端固定于所述伸缩臂的第二端的端头上,所述伸缩臂通过其第一端的端头固定于所述电机的机壳上。通过设置导向杆,使伸缩臂的伸缩更平稳和顺畅。
13、可选实施例中,所述限位部件包括固定于所述底壳内的至少一个限位块,所述限位块的顶部下凹形成凹槽,所述导向杆架设于所述限位块上,并位于所述凹槽内。限位部件结构简单,限位导向效果好。
14、可选实施例中,所述可伸缩收袋机构设于横截面呈矩形的所述桶腔,所述桶腔包括沿逆时针方向依次连接的第一腔壁、第二腔壁、第三腔壁和第四腔壁;所述第一臂部的第一端与所述第一腔壁转动连接,所述导滑槽沿所述第三腔壁和所述第四腔壁设置,所述旋转臂处于初始位置时,所述第一臂部沿所述第一腔壁设置,所述第二臂部沿所述第二腔壁设置,所述旋转臂旋转完成对袋口的收拢处于终止位置时,所述第一臂部平行于所述第二腔壁,所述第二臂部平行于所述第一腔壁。
15、本实用新型实施例同时提供了一种智能垃圾桶,包括桶体和上述任一实施例中的可伸缩收袋机构,所述可伸缩收袋机构设于所述桶体的桶腔内。该智能垃圾桶在收拢袋口时,旋转臂和伸缩臂为两端两点受力,不容易变形,而且伸缩臂可延伸,以适应不同形状的桶腔。
16、应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本实用新型。
17、本实用新型中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
技术特征:
1.一种可伸缩收袋机构,其特征在于,包括:
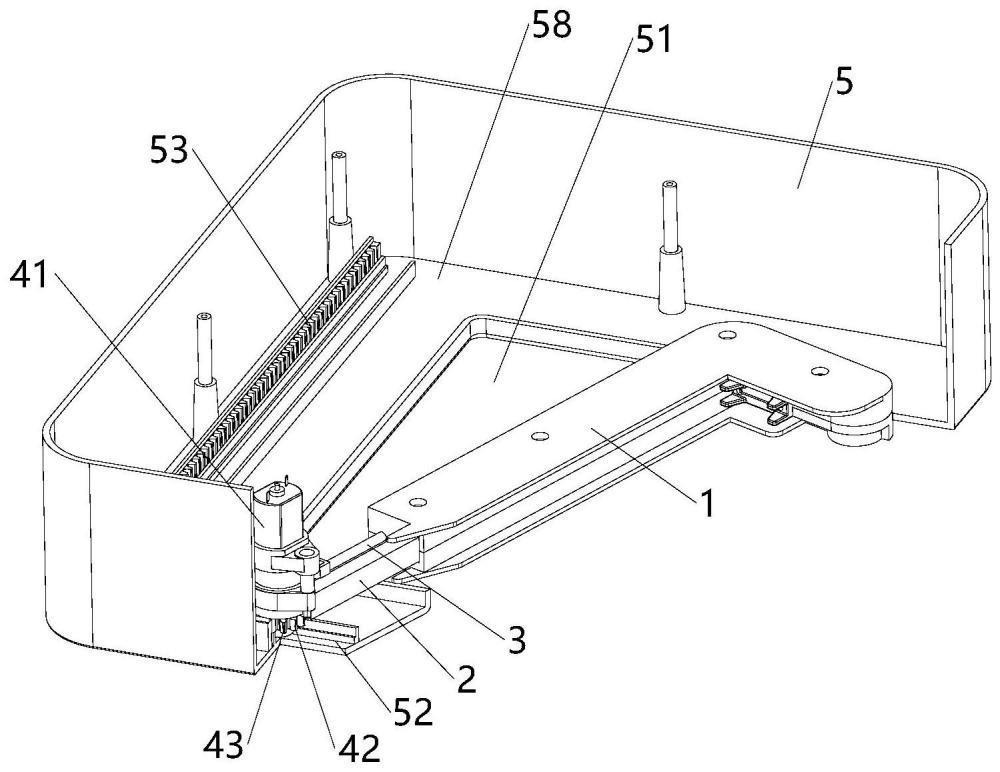
2.根据权利要求1所述的可伸缩收袋机构,其特征在于,所述驱动机构(4)包括电机(41)和驱动轮(42),所述导滑槽(52)的槽壁上设有导向齿(53);所述电机(41)的机壳固定于所述伸缩臂(2)的第一端,所述驱动轮(42)固定于所述电机(41)的输出轴上并与所述导向齿(53)保持啮合,所述电机(41)启动时能够带动所述驱动轮(42)转动并沿所述导向齿(53)移动。
3.根据权利要求2所述的可伸缩收袋机构,其特征在于,所述驱动机构(4)还包括导向轮(43),所述导向轮(43)转动连接于所述电机(41)的输出轴上,并限位于所述导滑槽(52)内,所述导向轮(43)在所述电机(41)的带动下能够沿所述导滑槽(52)移动。
4.根据权利要求1所述的可伸缩收袋机构,其特征在于,所述旋转臂(1)包括第一臂部(11)和第二臂部(12),所述第一臂部(11)的长度小于与所述第二臂部(12)的长度,所述第一臂部(11)与所述第二臂部(12)连接形成l形,所述第一臂部(11)的自由端与所述桶腔(51)的腔壁转动连接;所述伸缩臂(2)的第一端由所述第二臂部(12)的自由端向外伸出,并能够在所述驱动机构(4)的带动下调节伸出的长度。
5.根据权利要求2所述的可伸缩收袋机构,其特征在于,所述旋转臂(1)包括分别呈l形的上盖(13)和底壳(14),所述上盖(13)扣合于所述底壳(14)上,并与所述底壳(14)围成容腔,所述伸缩臂(2)的第一端伸出容腔外与所述电机(41)的机壳连接,所述伸缩臂(2)的第二端设于所述容腔内。
6.根据权利要求5所述的可伸缩收袋机构,其特征在于,所述容腔内设有导向杆(3)和用于对所述导向杆(3)的运动进行导向和限位的限位部件,所述导向杆(3)与所述伸缩臂(2)平行且并列设置,所述导向杆(3)的一端伸出所述容腔并固定于所述伸缩臂(2)的第一端的端头(21)上,所述导向杆(3)的另一端固定于所述伸缩臂(2)的第二端的端头(21)上,所述伸缩臂(2)通过其第一端的端头(21)固定于所述电机(41)的机壳上。
7.根据权利要求6所述的可伸缩收袋机构,其特征在于,所述限位部件包括固定于所述底壳(14)内的至少一个限位块(15),所述限位块(15)的顶部下凹形成凹槽(151),所述导向杆(3)架设于所述限位块(15)上,并位于所述凹槽(151)内。
8.根据权利要求4所述的可伸缩收袋机构,其特征在于,所述可伸缩收袋机构设于横截面呈矩形的所述桶腔(51),所述桶腔(51)包括沿逆时针方向依次连接的第一腔壁(54)、第二腔壁(55)、第三腔壁(56)和第四腔壁(57);所述第一臂部(11)的第一端与所述第一腔壁(54)转动连接,所述导滑槽(52)沿所述第三腔壁(56)和所述第四腔壁(57)设置,所述旋转臂(1)处于初始位置时,所述第一臂部(11)沿所述第一腔壁(54)设置,所述第二臂部(12)沿所述第二腔壁(55)设置,所述旋转臂(1)旋转完成对袋口的收拢处于终止位置时,所述第一臂部(11)平行于所述第二腔壁(55),所述第二臂部(12)平行于所述第一腔壁(54)。
9.一种智能垃圾桶,包括桶体(5),其特征在于,还包括权利要求1至8中任一项所述的可伸缩收袋机构,所述可伸缩收袋机构设于所述桶体(5)的桶腔(51)内。
技术总结
本技术实施例提供了一种可伸缩收袋机构及智能垃圾桶,可伸缩收袋机构包括:旋转臂,设于桶体的桶腔内,旋转臂的第一端与桶腔的腔壁转动连接;导滑槽,沿桶腔的腔壁的周向设置;驱动机构,设于导滑槽内,且驱动机构启动时能够沿导滑槽移动;伸缩臂,活动设于旋转臂上,且其第一端与驱动机构连接,以在驱动机构启动时带动伸缩臂沿旋转臂移动,调节伸缩臂伸出的长度,且带动伸缩臂和旋转臂一起转动,对置于桶腔内的袋体的袋口进行收拢。本技术可伸缩收袋机构通过转动的方式对袋口进行收拢,且在收拢的过程中,驱动机构可以带动伸缩臂伸缩,以调节由旋转臂和伸缩臂所构成的收拢部件的总长度,以适配不同形状的桶腔,收拢不同形状的袋口。
技术研发人员:苏正雄
受保护的技术使用者:苏正雄
技术研发日:20230620
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!