一种巡检系统及物料输送系统的制作方法
本技术涉及巡检机器人,具体涉及一种巡检系统及物料输送系统。
背景技术:
1、随着机器人技术与人工智能技术的发展,无人巡检机器人开始获得广泛应用,如数据机房巡检、配电房巡检、变电站巡检、园区巡检等。
2、以带式输送机输送系统的巡检作业为例,在带式输送机输送系统中一般设计多个转运站,通过多组带式输送机的多级转运,实现散料的多向分流输送。因此在一个转运站中通常多层带式输送机运转车间以实现多组带式输送机的多级转运。
3、但是,在运转车间设置巡检机器人时,由于多层设置的运转车间内的巡检机器人轨道彼此缺乏联系,使得一台巡检机器人无法穿越多层设置的运转车间,因此需要在每个运转车间里都配备巡检机器人,才能实现每层带式输送机运转车间的巡检,且多台巡检机器人需要将各自的巡检结果汇总才能反映整个带式输送机输送系统的整体情况,这导致整个巡检系统的成本高,整体性差。
技术实现思路
1、有鉴于此,本实用新型提供了一种巡检系统,以解决巡检机器人无法穿越多层设置的运转车间,导致整个巡检系统的成本高,整体性差的问题。
2、同时,本实用新型提供了一种物料输送系统,以解决其中巡检系统的巡检机器人无法穿越多层设置的运转车间,导致整个物料输送系统的成本高,整体性差的问题。
3、第一方面,本实用新型提供了一种巡检系统,包括:升降组件,其中设置有巡检机器人;牵引件,与所述升降组件相连,并适于受驱动带动所述升降组件运动;若干固定轨道,沿高度方向间隔设置,所述升降组件适于运动至任一所述固定轨道的一端,并使所述巡检机器人驶入所述固定轨道。
4、有益效果:本实用新型提供一种巡检系统,通过升降组件、巡检机器人、牵引件、固定轨道等构件的相互配合,实现了单一巡检机器人在不同高度位置的巡检作业,当固定轨道设置在多层设置的运转车间时,便能在不同车间为巡检机器人提供巡检轨道,使得仅使用一台巡检机器人便可在不同高度上对多层运转车间进行巡检作业,再由一台巡检机器人对巡检结果进行反馈,提高了整个巡检系统的整体性,同时仅使用一台巡检机器人也降低了成本,从而解决了巡检机器人无法穿越多层设置的运转车间,导致整个巡检系统的成本高,整体性差的问题。
5、在一种可选的实施方式中,还包括与所述牵引件动力连接的驱动件,所述驱动件适于为所述牵引件提供动力。
6、有益效果:驱动件作为动力源为牵引件对升降组件及巡检机器人的驱动提供动力,实现巡检系统的自动驱动操作。驱动件具体设置为液压油缸、电机等。
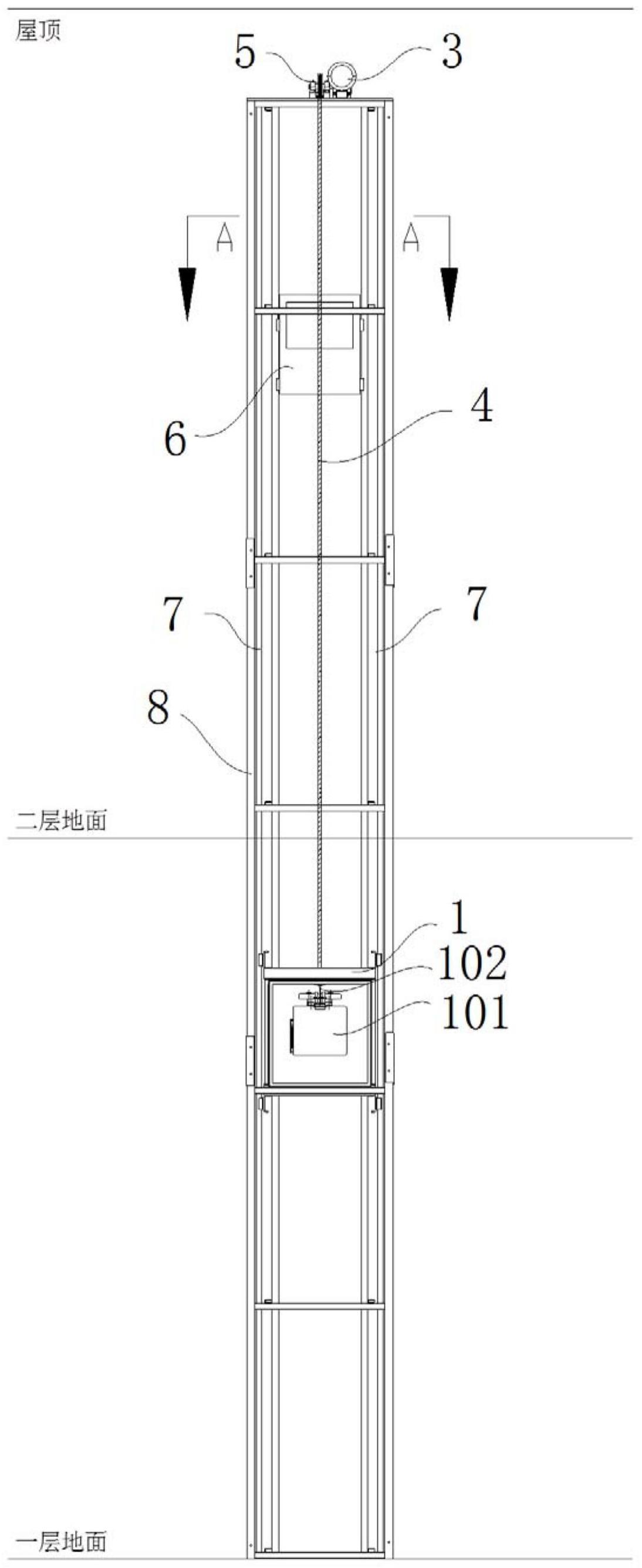
7、在一种可选的实施方式中,所述驱动件设置为曳引电机,所述牵引件设置为钢丝绳,所述巡检系统还包括:定滑轮,其上绕设所述钢丝绳;对重件,与所述钢丝绳远离所述升降组件的一端相连,所述升降组件和所述对重件位于所述定滑轮的两侧,所述曳引电机与所述定滑轮动力连接。
8、有益效果:设置与升降组件及巡检机器人重量相当对重件,曳引电机通过驱动定滑轮提供一定的平衡力,以很小的动力实现升降组件的升降运动,从而降低种巡检系统的运行成本。
9、在一种可选的实施方式中,还包括设置在所述升降组件中的对接轨道,所述对接轨道与所述固定轨道平行设置,所述巡检机器人设置在所述对接轨道上并适于沿所述对接轨道运动。
10、有益效果:在升降组件上形成适于巡检机器人运动的轨道结构即对接轨道,同时将巡检机器人设置在对接轨道上,便于巡检机器人随升降组件同步运动,并且巡检机器人也适于沿对接轨道横向运动。对接轨道与固定轨道平行设置,当对接轨道带动巡检机器人同步运动至与任一固定轨道位于同一高度时,通过控制系统停止升降组件的升降运行从而固定对接轨道及巡检机器人的高度位置,便于巡检机器人顺利进入固定轨道。
11、在一种可选的实施方式中,所述对接轨道的横截面与所述固定轨道的横截面相同。
12、有益效果:设置对接轨道的横截面与固定轨道的横截面相同,即确保对接轨道和固定轨道的规格完全相同,便于巡检机器人通过对接轨道顺畅地驶入固定轨道,提高巡检系统运行的流畅性和稳定性。
13、在一种可选的实施方式中,还包括:位置检测装置,适于检测所述对接轨道与所述固定轨道的相对位置;控制器,通讯连接在所述检测装置与所述驱动件之间。
14、有益效果:通过位置检测装置确定对接轨道与固定轨道的相对位置,并通过控制器控制升降组件运行,控制器在得到检测装置发出的位置信息后进一步给出升降组件具体升降指令,当位置检测装置检测到对接轨道与某一固定轨道位于同一高度后,将位置信息反馈给控制器,控制器进一步控制升降组件停止运行,确保对接轨道停留在固定轨道的同一高度位置,便于巡检机器人顺利进入固定轨道。
15、在一种可选的实施方式中,还包括沿高度方向设置是升降轨道,所述升降组件与所述升降轨道相接并适于沿所述升降轨道运动。
16、有益效果:通过设置升降轨道为升降组件的升降运动进行限位,进一步提高巡检系统的运行稳定性。
17、在一种可选的实施方式中,还包括沿高度方向设置的架体,所述升降轨道设置在所述架体上,所述升降组件设置在所述架体中并适于沿所述架体的延伸方向运动。
18、有益效果:架体为升降轨道提供安装位置,并对升降组件的升降运动进行限位,同时还为曳引电机、定滑轮提供安装位置。
19、第二方面,本实用新型还提供了一种物料输送系统,包括:转运车间,设置有多层,每层所述转运车间内部设置有输送机;上述任一实施方式所述的巡检系统,所述升降组件适于沿所述转运车间高度方向运动,若干所述固定轨道对应设置在所述转运车间中。
20、有益效果:本实用新型提供一种物料输送系统,通过将巡检系统的若干固定轨道对应设置在转运车间中,通过升降组件、巡检机器人、牵引件等构件的相互配合,实现了单一巡检机器人在不同车间为巡检机器人提供巡检轨道,使得仅使用一台巡检机器人便可在不同高度上对多层运转车间进行巡检作业,再由一台巡检机器人对巡检结果进行反馈,提高了整个巡检系统的整体性,同时仅使用一台巡检机器人也降低了成本,从而解决了物料输送系统中巡检系统的巡检机器人无法穿越多层设置的运转车间,导致整个物料输送系统的成本高,整体性差的问题。
21、此外,因为物料输送系统包括巡检系统,具有与巡检系统相同的效果,在此不再赘述。
22、在一种可选的实施方式中,还包括预留安装孔位,对应所述升降组件的运动位置设置在若干所述转运车间的楼板上。
23、有益效果:物料输送系统还包括预留安装孔位,对应升降组件的运动位置设置在若干转运车间的楼板上。
技术特征:
1.一种巡检系统,其特征在于,包括:
2.根据权利要求1所述的巡检系统,其特征在于,还包括与所述牵引件动力连接的驱动件,所述驱动件适于为所述牵引件提供动力。
3.根据权利要求2所述的巡检系统,其特征在于,所述驱动件设置为曳引电机(3),所述牵引件设置为钢丝绳(4),所述巡检系统还包括:
4.根据权利要求2所述的巡检系统,其特征在于,还包括设置在所述升降组件(1)中的对接轨道(102),所述对接轨道(102)与所述固定轨道(2)平行设置,所述巡检机器人(101)设置在所述对接轨道(102)上并适于沿所述对接轨道(102)运动。
5.根据权利要求4所述的巡检系统,其特征在于,所述对接轨道(102)的横截面与所述固定轨道(2)的横截面相同。
6.根据权利要求4所述的巡检系统,其特征在于,还包括:
7.根据权利要求1至6中任一项所述的巡检系统,其特征在于,还包括沿高度方向设置是升降轨道(7),所述升降组件(1)与所述升降轨道(7)相接并适于沿所述升降轨道(7)运动。
8.根据权利要求7所述的巡检系统,其特征在于,还包括沿高度方向设置的架体(8),所述升降轨道(7)设置在所述架体(8)上,所述升降组件(1)设置在所述架体(8)中并适于沿所述架体(8)的延伸方向运动。
9.一种物料输送系统,其特征在于,包括:
10.根据权利要求9所述的物料输送系统,其特征在于,还包括预留安装孔位,对应所述升降组件(1)的运动位置设置在若干所述转运车间的楼板上。
技术总结
本技术涉及巡检机器人技术领域,公开了具体涉及一种巡检系统及物料输送系统。巡检系统包括:升降组件,其中设置有巡检机器人;牵引件,与升降组件相连,并适于受驱动带动升降组件运动;若干固定轨道,沿高度方向间隔设置,升降组件适于运动至任一固定轨道的一端,并使巡检机器人驶入固定轨道。本技术通过升降组件、巡检机器人、牵引件、固定轨道实现了单一巡检机器人在不同高度位置的巡检作业,在不同车间为巡检机器人提供巡检轨道,使得仅使用一台巡检机器人便可在不同高度上对多层运转车间进行巡检作业,再由一台巡检机器人对巡检结果进行反馈,提高了整个巡检系统的整体性,同时仅使用一台巡检机器人也降低了成本。
技术研发人员:张延超,刘晓朋,穆慧灵,石峥嵘
受保护的技术使用者:华电重工股份有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!