一种搬运机器人的夹具的制作方法
本技术涉及搬运夹具,尤其涉及一种搬运机器人的夹具。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,最为常见的agv小车也称搬运机器人,agv小车靠传感器感知地面上的轨迹路线进行移动,agv小车顶部可放置需要搬运的物件,这种搬运机器人会严格按照地面上的轨迹路线进行移动,其优点在于运行速度稳定,运行稳重。
2、如中国专利cn207329795u公开了一种码垛搬运机器人用的复合夹具,包括夹具机架,所述夹具机架上设置有纸箱提取机构、纸板提取机构、卡板提取机构和气路控制模块;所述纸箱提取机构、纸板提取机构和卡板提取机构相互独立设置,互不干涉;所述气路控制模块分别控制纸箱提取机构、纸板提取机构和卡板提取机构。此实用新型通过整合纸箱提取机构、纸板提取机构和卡板提取机构在一夹具上,使此夹具能同时抓取纸箱、纸板和卡板,实现一次性抓取,大大提高了抓取效率,而且全自动化工作,使码放效果和效率大大提高,而且性能可靠、操作便捷、有效减少劳动量。
3、在现有技术中,搬运机器人虽然能够实现搬运产品,但是前期需要将产品放置到搬运机器人上,缺乏产品夹持的夹具,同时,在夹持移动的过程中,产品会因为夹持摩擦力减小,导致产品掉落。
技术实现思路
1、本实用新型的目的是为了解决背景技术中提出的搬运机器人虽然能够实现搬运产品,但是前期需要将产品放置到搬运机器人上,缺乏产品夹持的夹具,同时,在夹持移动的过程中,产品会因为夹持摩擦力减小,导致产品掉落的问题。
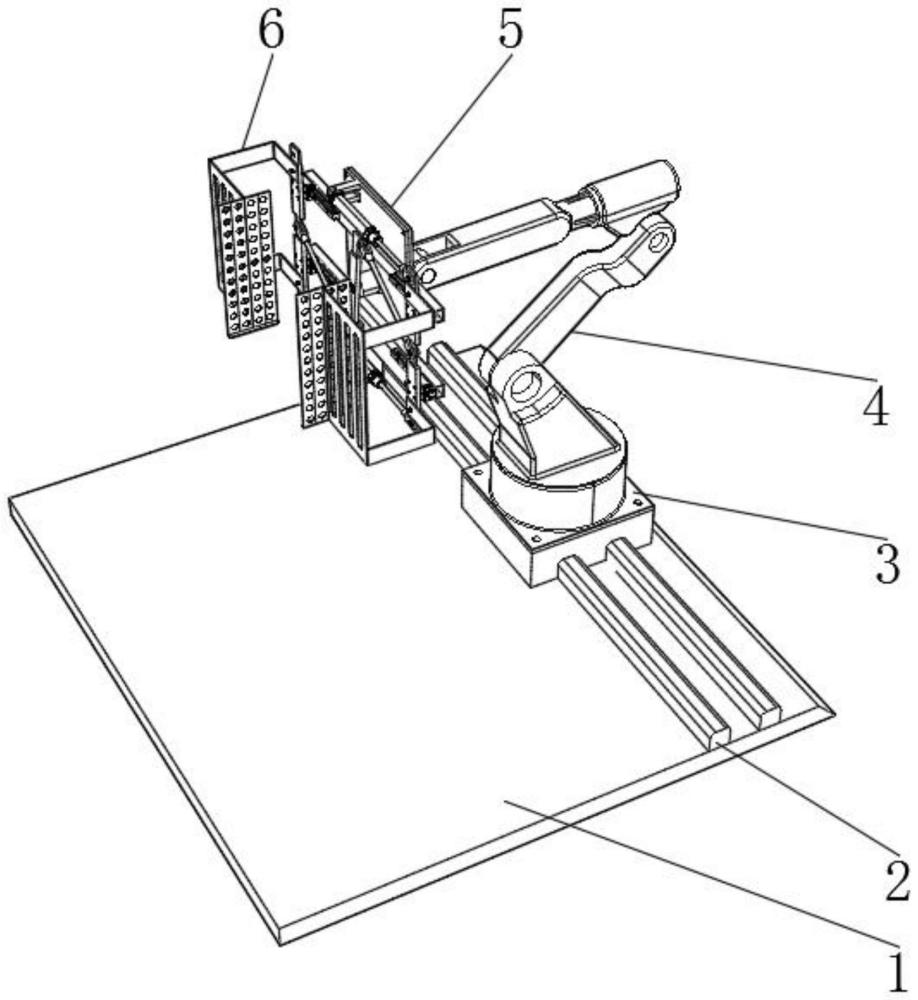
2、为了实现上述目的,本实用新型采用了如下技术方案:一种搬运机器人的夹具,包括安装板、轨道、移动台和搬运机械臂,所述搬运机械臂的前端固定连接有夹持机构,所述夹持机构的另一侧固定连接有防掉落机构,所述防掉落机构包括匚形架,所述匚形架的一端固定连接有夹持板,所述夹持板的内部开设有通孔,所述夹持板的下侧固定连接有底板,所述匚形架的另一端固定连接有移动板。
3、优选的,所述移动板的中部转动连接有连接杆,所述移动板的另一侧固定连接有滑夹。
4、优选的,所述滑夹的另一侧内部活动卡接有导轨,所述导轨的另一侧通过螺栓固定连接有延伸杆。
5、优选的,所述延伸杆的另一侧固定连接有连接板,所述连接板的中部固定安装有伺服电机。
6、优选的,所述伺服电机的转动轴固定安装有中心板,所述中心板的两端与所述连接杆的另一端转动连接。
7、优选的,所述移动板的两端转动连接有液压缸,所述液压缸的外壳端部与所述连接板的内部转动连接。
8、优选的,所述夹持机构的下端与所述移动台的上侧固定连接,所述移动台的内部与所述轨道的外侧活动卡接,所述轨道的下侧与所述安装板的上侧固定安装。
9、与现有技术相比,本实用新型的优点和积极效果在于:
10、1、本实用新型中,通过设置防掉落机构,实现夹持产品的同时,托住产品,避免产品掉落,提高夹持的稳定性,通过搬运机械臂进行运动,使得防掉落机构翻转九十度成水平状态,并带动夹持机构和防掉落机构靠近需要搬运的产品附近,并使得产品位于两个夹持板之间,夹持机构工作使得两侧移动板受力向中部运动,使得两侧的匚形架向中部推动夹持板,夹持板较长的边长与产品高度垂直,同时底板的拐角与产品的高所在直线重合,若干通孔减轻夹持板的重量,由此两个夹持板夹持住产品,接着搬运机械臂运动,使得夹持机构和防掉落机构带动产品回转九十度,两侧的底板托住产品,避免夹持移动的过程中产品掉落,然后移动台移动,完成产品的搬运。
11、2、本实用新型中,通过设置夹持机构,实现移动板受力均衡并稳定向中部靠近移动,为防掉落机构提供夹持力,通过启动伺服电机,伺服电机带动中心板转动一定角度,向中部拉动两端的连接杆,其中一个连接杆拉动移动板的中部,同时上下两个部分的液压缸进行收缩,液压缸的活动杆部分分别拉动移动板的两端,由此移动板上中下三个点位受到拉动,保证夹持时整个防掉落机构受力均匀,不会轻易变形,提高稳定性,保证牢固夹持,移动板将拉力传递到滑夹,使得两个滑夹在对应的导轨向中部滑动,保证是直线移动,两侧同样运动,使防掉落机构完成夹持。
技术特征:
1.一种搬运机器人的夹具,包括安装板(1)、轨道(2)、移动台(3)和搬运机械臂(4),其特征在于:所述搬运机械臂(4)的前端固定连接有夹持机构(5),所述夹持机构(5)的另一侧固定连接有防掉落机构(6),所述防掉落机构(6)包括匚形架(61),所述匚形架(61)的一端固定连接有夹持板(62),所述夹持板(62)的内部开设有通孔(63),所述夹持板(62)的下侧固定连接有底板(64),所述匚形架(61)的另一端固定连接有移动板(58)。
2.根据权利要求1所述的一种搬运机器人的夹具,其特征在于:所述移动板(58)的中部转动连接有连接杆(55),所述移动板(58)的另一侧固定连接有滑夹(59)。
3.根据权利要求2所述的一种搬运机器人的夹具,其特征在于:所述滑夹(59)的另一侧内部活动卡接有导轨(57),所述导轨(57)的另一侧通过螺栓固定连接有延伸杆(56)。
4.根据权利要求3所述的一种搬运机器人的夹具,其特征在于:所述延伸杆(56)的另一侧固定连接有连接板(51),所述连接板(51)的中部固定安装有伺服电机(54)。
5.根据权利要求4所述的一种搬运机器人的夹具,其特征在于:所述伺服电机(54)的转动轴固定安装有中心板(53),所述中心板(53)的两端与所述连接杆(55)的另一端转动连接。
6.根据权利要求5所述的一种搬运机器人的夹具,其特征在于:所述移动板(58)的两端转动连接有液压缸(52),所述液压缸(52)的外壳端部与所述连接板(51)的内部转动连接。
7.根据权利要求1所述的一种搬运机器人的夹具,其特征在于:所述夹持机构(5)的下端与所述移动台(3)的上侧固定连接,所述移动台(3)的内部与所述轨道(2)的外侧活动卡接,所述轨道(2)的下侧与所述安装板(1)的上侧固定安装。
技术总结
本技术提供一种搬运机器人的夹具,涉及搬运夹具技术领域,包括安装板、轨道、移动台和搬运机械臂,所述搬运机械臂的前端固定连接有夹持机构,所述夹持机构的另一侧固定连接有防掉落机构。本技术通过搬运机械臂进行运动,翻转九十度成水平状态,夹持机构工作使得两侧移动板受力向中部运动,使得两侧的匚形架向中部推动夹持板,夹持板较长的边长与产品高度垂直,同时底板的拐角与产品的高所在直线重合,两个夹持板夹持住产品,夹持机构和防掉落机构带动产品回转九十度,两侧的底板托住产品,然后移动台移动,完成产品的搬运,通过设置防掉落机构,实现夹持产品的同时,托住产品,避免产品掉落,提高夹持的稳定性。
技术研发人员:刘毅杰,李影超
受保护的技术使用者:西安大隋精密传动科技有限公司
技术研发日:20230705
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!