一种搬运机器人的输送机构
本技术涉及搬运机器人领域,尤其涉及一种搬运机器人的输送机构。
背景技术:
1、现有搬运机器人上一般安装带式输送机作为输送机构,利用带式输送机工作完成上料和下料,带式输送机静止时能够承载货物,结构简单、实用。但对于面积大、重量轻的平板类货物在由搬运机器人进行搬运过程中,由于缺少固定结构,搬运机器人运动时,使得平板类货物容易从带式输送机上滑落。
技术实现思路
1、本实用新型的目的在于克服现有技术存在的搬运机器人运动时平板类货物容易从输送机上滑落的问题,提供一种搬运机器人的输送机构。
2、为实现上述技术目的,达到上述技术效果,本实用新型通过以下技术方案实现:
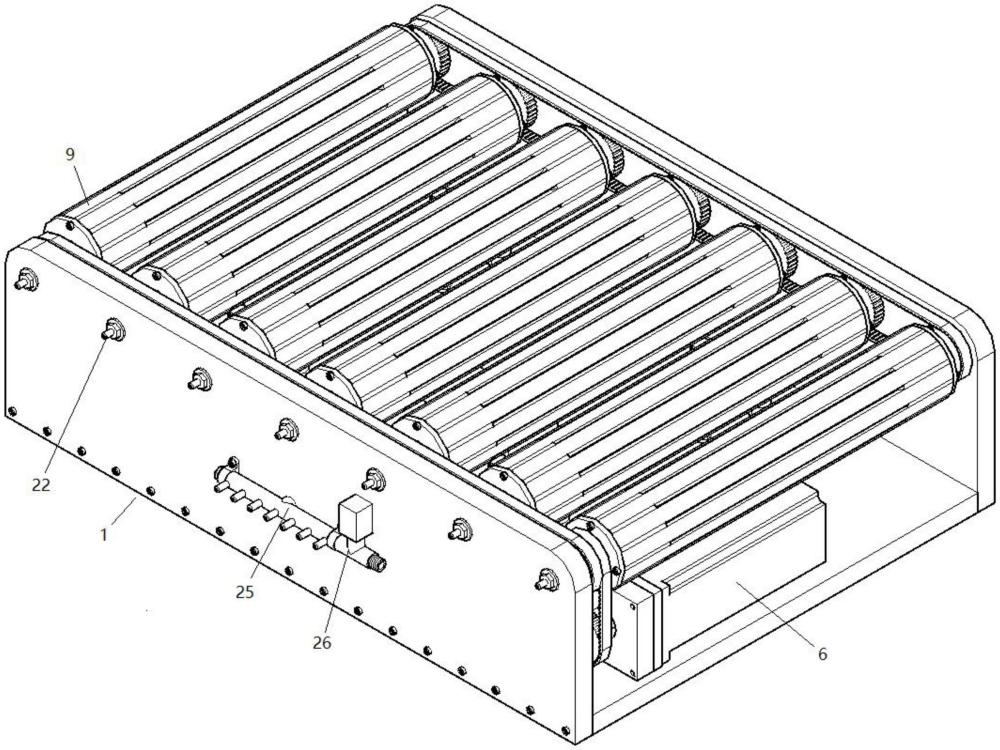
3、一种搬运机器人的输送机构,包括用于与搬运机器人连接的u型安装座、伺服电机、真空泵,所述伺服电机和真空泵分别安装在u型安装座上,所述u型安装座的上部安装有n根相互平行且间隔相同的空心轴,所述空心轴的中部外侧过盈安装有橡胶导气筒,所述橡胶导气筒外套有输送辊筒,所述输送辊筒的两头分别安装一只第一轴承,所述第一轴承的内圈过盈安装在空心轴上,所述输送辊筒的两端分别安装一个传动端头,所述伺服电机的动力输出轴上安装有主动同步带轮,所述主动同步带轮通过第一同步带与其中一个传动端头传动连接,位于所述u型安装座同一侧的全部传动端头用第二同步带传动连接;
4、所述输送辊筒的侧壁上设有m个沿输送辊筒径向贯穿输送辊筒侧壁的第一条形口,并且m个第一条形口以输送辊筒的中心轴为中心按照环形阵列排布,所述橡胶导气筒的侧壁上设有一个沿橡胶导气筒径向贯穿橡胶导气筒侧壁的第二条形口,所述空心轴的侧壁上设有一个沿空心轴径向贯穿空心轴侧壁的第三条形口,所述第二条形口能够与任一第一条形口连通,所述第三条形口与第二条形口相连通,所述空心轴的一头螺接有与空心轴内部空腔连通的活动气管接头,所述空心轴的另一头螺接有堵头,所述u型安装座的一侧安装有具有n个固定气管接头的t型汇流管,所述固定气管接头与活动气管接头用第一软管连通,所述t型汇流管的出气口用第二软管与真空泵的进气口连通,所述t型汇流管的进气口安装有电磁截止阀。
5、其中,所述u型安装座包括一块矩形的底板、两块矩形的侧板、一块电机安装板和一块真空泵安装板,两块所述侧板分别用螺丝安装在底板的左右两侧,所述电机安装板和真空泵安装板分别用螺丝垂直安装在底板上,所述伺服电机用螺丝安装在电机安装板一侧,所述真空泵用螺丝安装在真空泵安装板的一侧。
6、其中,所述传动端头包括依次排布的法兰盘、连接环、从动同步带轮,并且所述法兰盘、连接环、从动同步带轮一体制成。
7、本实用新型的有益效果是:伺服电机工作驱动主动同步带轮转动,通过第一同步带轮和第二同步带轮带动输送辊筒转动,以实现平板类货物的输送;真空泵工作将相连通的第一条形口、第二条形口、第三条形口和空心轴的空腔内空气依次经过活动气管接头、第一软管、t型汇流管、第二软管抽出,使第一条形口、第二条形口、第三条形口和空心轴的空腔内形成负压,使位于输送辊筒上的平板类货物被负压吸引,从而使平板类货物被吸附固定在输送辊筒上,从而防止平板类货物在搬运机器人运动过程中滑落。
技术特征:
1.一种搬运机器人的输送机构,其特征在于:包括用于与搬运机器人连接的u型安装座、伺服电机、真空泵、至少一组传动带张紧机构,所述伺服电机和真空泵分别安装在u型安装座上,所述u型安装座的上部安装有n根相互平行且间隔相同的空心轴,所述空心轴的中部外侧过盈安装有橡胶导气筒,所述橡胶导气筒外套有输送辊筒,所述输送辊筒的两头分别安装一只第一轴承,所述第一轴承的内圈过盈安装在空心轴上,所述输送辊筒的两端分别安装一个传动端头,所述伺服电机的动力输出轴上安装有主动同步带轮,所述主动同步带轮通过第一同步带与其中一个传动端头传动连接,位于所述u型安装座同一侧的全部传动端头用第二同步带传动连接;
2.根据权利要求1所述的输送机构,其特征在于:所述u型安装座包括一块矩形的底板、两块矩形的侧板、一块电机安装板和一块真空泵安装板,两块所述侧板分别用螺丝安装在底板的左右两侧,所述电机安装板和真空泵安装板分别用螺丝垂直安装在底板上,所述伺服电机用螺丝安装在电机安装板一侧,所述真空泵用螺丝安装在真空泵安装板的一侧。
3.根据权利要求1所述的输送机构,其特征在于:所述传动端头包括依次排布的法兰盘、连接环、从动同步带轮,并且所述法兰盘、连接环、从动同步带轮一体制成。
4.根据权利要求3所述的输送机构,其特征在于:单独与所述第二同步带传动连接的从动同步带轮的宽度等于第二同步带宽度,同时与所述第一同步带和第二同步带传动连接的从动同步带轮的宽度为第二同步带宽度的二倍,所述第一同步带宽度等于第二同步带宽度。
5.根据权利要求1所述的输送机构,其特征在于:所述输送辊筒的外侧面设有m个按照环形阵列排布的支撑平面,每个所述支撑平面上对应有一个第一条形口。
6.根据权利要求1所述的输送机构,其特征在于:所述第一条形口的长度、第二条形口的长度和第三条形口的长度相同,所述第一条形口的宽度大于第二条形口的宽度,所述第二条形口的宽度等于第三条形口的宽度。
7.根据权利要求1所述的输送机构,其特征在于:所述输送辊筒的表面包裹有橡胶保护层。
技术总结
本技术涉及一种搬运机器人的输送机构,包括U型安装座、伺服电机、真空泵、空心轴、橡胶导气筒、输送辊筒、传动端头、活动气管接头、堵头、具有固定气管接头的T型汇流管、主动同步带轮,输送辊筒的侧壁上设有M个第一条形口,橡胶导气筒的侧壁上设有一个第二条形口,空心轴的侧壁上设有一个第三条形口,第二条形口能够与任一第一条形口连通,第三条形口与第二条形口相连通,固定气管接头与活动气管接头用软管连通,T型汇流管的出气口用软管与真空泵的进气口连通。有益效果是:使位于输送辊筒上的平板类货物被负压吸引,从而使平板类货物被吸附固定在输送辊筒上,从而防止平板类货物在搬运机器人运动过程中滑落。
技术研发人员:孙力,冯娟
受保护的技术使用者:江苏省扬州技师学院
技术研发日:20230707
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!