一种搬运机器人的顶升结构的制作方法
本技术涉及搬运机器人,特别的涉及一种搬运机器人的顶升结构。
背景技术:
1、在现代社会中,机器人越来越深入我们的生活;其中搬运机器人在货物搬运与存放中得到了广泛的应用,随着电子商务的爆炸性增长,电商的仓储分拣工作量也大幅增加,目前,很多电商仓库中都配备了搬运机器人以实现仓库的自动化无人化搬运物品,从而降低人工成本。但是搬运机器人通常使用的诸如液压顶升,液压装置可能出现油液外泄,影响装置的工作效果。
2、因此,提出一种搬运机器人的顶升结构以解决上述问题。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种搬运机器人的顶升结构,改善了搬运机器人通常使用的诸如液压顶升,液压装置可能出现油液外泄,影响装置的工作效果的问题。
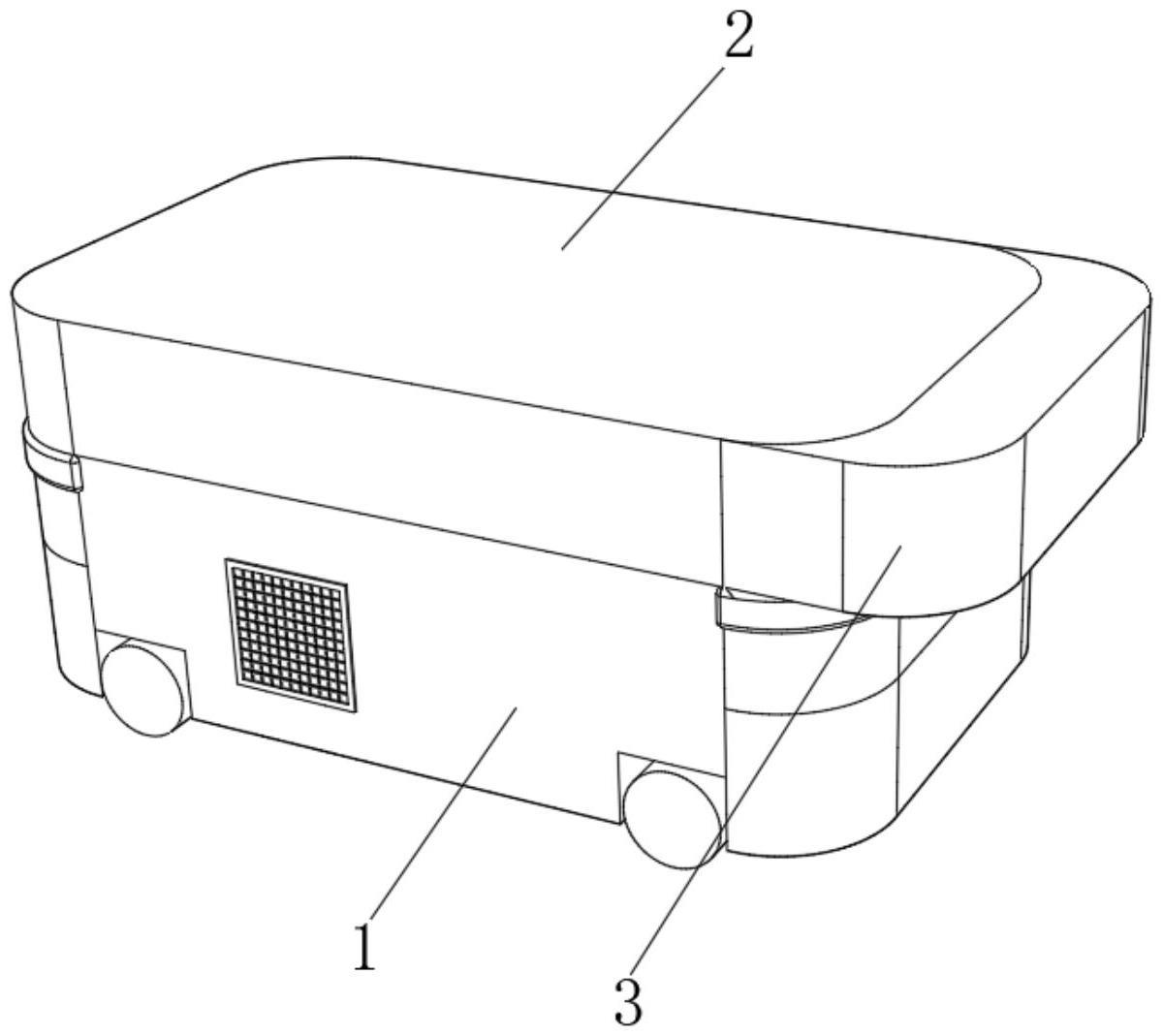
2、本实用新型通过以下技术方案来实现上述目的,一种搬运机器人的顶升结构,包括:机器人本体,所述机器人本体的上端设置有搬运台;顶升机构,所述顶升机构设置于搬运台的内部,所述顶升机构的表面贯穿至搬运台的外部;其中,所述顶升机构包括连接于搬运台一端的外壳,所述外壳的内部设置有驱动组件,所述驱动组件的表面贯穿至搬运台的内部并连接有支撑组件,所述支撑组件设置于搬运台的内部。
3、优选的,所述支撑组件包括固定连接于搬运台内顶壁的滑轨,所述滑轨的表面滑动连接有滑块,所述滑块的上端开设有滑槽,所述滑槽的内壁与滑轨的表面滑动连接,所述滑块的两侧均固定连接有转动头,所述转动头的表面转动连接有支撑杆。
4、优选的,所述驱动组件包括转动连接于搬运台一端的第一转动杆和第二转动杆,所述第二转动杆与第一转动杆的端部均贯穿至搬运台的内部并固定连接于支撑组件的表面,所述第二转动杆与第一转动杆的表面均固定连接有齿轮,相邻所述齿轮之间啮合连接。
5、优选的,所述支撑杆的另一端铰接有铰接座,所述铰接座安装于机器人本体的上端。
6、优选的,所述滑块的内壁固定连接有螺纹套,所述螺纹套的内壁螺纹连接有螺纹杆,所述螺纹杆的两端转动连接于搬运台的内壁。
7、优选的,所述驱动组件包括固定连接于外壳内壁的伺服电机,所述伺服电机输出轴固定连接有蜗杆,所述第一转动杆的表面固定连接有蜗轮,所述蜗轮与蜗杆的表面啮合连接。
8、本实用新型的有益效果是:
9、1、通过设置顶升机构,能够在顶升机构的作用下,对搬运台进行稳定的顶升与下降动作,相对于传统装置使用的诸如液压顶升,液压装置可能出现油液外泄,影响装置的工作效果,该装置达到了通过驱动组件的工作带动支撑组件进行同步动作,使得四组支撑杆将会同步将搬运台进行支撑的效果,达到对搬运台稳定支撑的作用,同时驱动组件内部设置有蜗杆与蜗轮的配合,可以在其自锁性的作用下,避免搬运台上方装置过重发生单向运动的其实,从而使装置在工作过程中维持稳定性,进而保障了装置的工作效果。
10、2、通过设置驱动组件,能够在驱动组件的作用下,对其支撑组件工作过程稳定性保障,该装置通过启动伺服电机将会使得输出轴将会带动两个蜗杆跟随进行转动,使得第一转动杆表面固定连接的齿轮进行同步转动,使得第二转动杆与第一转动杆的转动方向同步反向转动,达到了相邻的螺纹杆跟随进行转动,进而保障了装置的工作效果。
技术特征:
1.一种搬运机器人的顶升结构,其特征在于,包括:
2.根据权利要求1所述的一种搬运机器人的顶升结构,其特征在于:所述支撑组件(33)包括固定连接于搬运台(2)内顶壁的滑轨(331),所述滑轨(331)的表面滑动连接有滑块(332),所述滑块(332)的上端开设有滑槽(333),所述滑槽(333)的内壁与滑轨(331)的表面滑动连接,所述滑块(332)的两侧均固定连接有转动头(335),所述转动头(335)的表面转动连接有支撑杆(334)。
3.根据权利要求1所述的一种搬运机器人的顶升结构,其特征在于:所述驱动组件(32)包括转动连接于搬运台(2)一端的第一转动杆(322)和第二转动杆(323),所述第二转动杆(323)与第一转动杆(322)的端部均贯穿至搬运台(2)的内部并固定连接于支撑组件(33)的表面,所述第二转动杆(323)与第一转动杆(322)的表面均固定连接有齿轮(324),相邻所述齿轮(324)之间啮合连接。
4.根据权利要求2所述的一种搬运机器人的顶升结构,其特征在于:所述支撑杆(334)的另一端铰接有铰接座(336),所述铰接座(336)安装于机器人本体(1)的上端。
5.根据权利要求2所述的一种搬运机器人的顶升结构,其特征在于:所述滑块(332)的内壁固定连接有螺纹套(338),所述螺纹套(338)的内壁螺纹连接有螺纹杆(337),所述螺纹杆(337)的两端转动连接于搬运台(2)的内壁。
6.根据权利要求3所述的一种搬运机器人的顶升结构,其特征在于:所述驱动组件(32)包括固定连接于外壳(31)内壁的伺服电机(321),所述伺服电机(321)输出轴固定连接有蜗杆(325),所述第一转动杆(322)的表面固定连接有蜗轮(326),所述蜗轮(326)与蜗杆(325)的表面啮合连接。
技术总结
本技术涉及搬运机器人技术领域,具体的说是一种搬运机器人的顶升结构,包括:机器人本体,所述机器人本体的上端设置有搬运台;顶升机构,所述顶升机构设置于搬运台的内部,所述顶升机构的表面贯穿至搬运台的外部;其中,所述顶升机构包括连接于搬运台一端的外壳,所述外壳的内部设置有驱动组件;通过设置顶升机构,该装置达到了通过驱动组件的工作带动支撑组件进行同步动作,使得四组支撑杆将会同步将搬运台进行支撑的效果,达到对搬运台稳定支撑的作用,同时驱动组件内部设置有蜗杆与蜗轮的配合,可以在其自锁性的作用下,避免搬运台上方装置过重发生单向运动的其实,从而使装置在工作过程中的稳定性,进而保障了装置的工作效果。
技术研发人员:田丛林
受保护的技术使用者:济南尚艺数控科技有限公司
技术研发日:20230712
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!