新型闭环传感控制的排线器的制作方法
本技术涉及排线器,特别是一种新型闭环传感控制的排线器。
背景技术:
1、在线缆生产厂家等,生产后的线缆为了方便运输和收纳,都会将线缆盘绕在收线盘上。具体工作时,收线盘的电机减速机构带动收线盘转动,放线控制机构控制自身排线器(排线器位于放线控制机构的控制臂前端)按照一定规律(一般plc控制)由左至右、由右至左运动不断将生产出的线缆输送到收线盘上,进而有效实现收线盘收卷线缆的目的。具体的为了实现线缆接近收线盘的内两侧端放线,排线器运动到收卷线盘横向一半位置后,放线控制机构的控制臂前端会控制排线器转动180度,使得排线器的侧端夹轮一侧和收线盘相应一侧内位置对应,这样,排线器运动到收线盘相应一侧内后,就能尽可能使得线缆贴合收线盘相应一侧内被收卷。实际生产时,为了实现有效的收线(线缆)作业,排线器需要采集线缆的运动状况(比如超前、延后或正常拉直),进而为plc提供信号,plc按照编程控制排线器的横向位移、使得收线盘上的收线点与线缆进盘前的排线器运动位置点的关系符合plc控制需求,满足线缆整齐的排列在收线盘上。本申请人提交了中国专利申请号“cn202223499883.4”、专利名称“一种改进新型机械手排线的闭环传感控制 装置”的专利申请,且该专利获得了授权。一种改进新型机械手排线的闭环传感控制 装置的专利记载到“通过比较两个压力传感 器的压力变化,实现三种状态位置的指示:向左, 向右,中间位置的信号,可以清楚的知道线缆在 盘具上与中心线的位置关系,从而plc控制移动 位置改变位置关系,从而实现全规格线缆的精密排线”。虽然该专利一定程度上解决了现有技术存在的问题,但是受到结构及功能限制,其实际工作时,由于该申请活动部位和安装板之间是铰接安装在一起,受重力、压力或者托举力等的影响,回到初始原点位置的能力受到摩擦力等的相应制约、不能保证灵敏性和及时性,从而使得压力传感器输出的信号存在相应较大的误差,给plc基于信号闭环控制排线带来信号数值误差,从而影响排线的稳定性。还有就是,现有的排线器在接近收线盘内两侧端前,为了防止夹头到收线盘内边碰擦造成收线盘或夹头碰伤的风险,夹具到收线盘内侧存在一点间距,并且收线盘不规整,这样不能有效使得线缆贴合收线盘内两侧端,会对排线的效果带来不利影响。
技术实现思路
1、为了克服现有排线器由于结构所限,存在如背景所述弊端,本实用新型提供了在相关机构共同作用下,传感转动臂一侧端通过转动臂限位支撑组的上下端轴承限位导向和支承,提高了包括传感转动臂回到初始位置的运动灵活性,传感转动臂及传感片转动灵活,使得距离传感器输出信号的更准确,且能通过到边传感器的信号控制气缸推缆机构的工作方式,推动线缆有效接触收线盘内侧一端,为plc控制排线器本体准确左或右运动实现紧密且高质量收线起到了有利技术支持的新型闭环传感控制的排线器。
2、本实用新型解决其技术问题所采用的技术方案是:
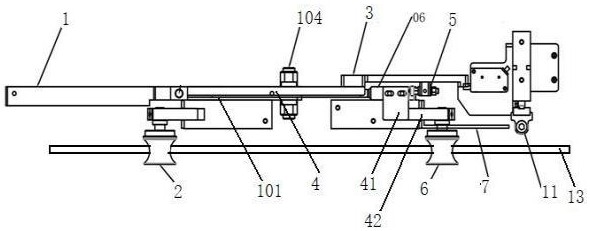
3、新型闭环传感控制的排线器,包括支架、定位夹头、传感器过渡连接支架、传感转动臂、转动臂限位支撑设备、传感夹头、感应挡片、距离传感器、到边检测传感器、水平光电开关、气缸推缆设备;其特征在于,所述支架的前端和放线控制机构的控制臂后端安装在一起,支架后端是开放式结构,传感转动臂前端转动安装在支架的后端前部上;所述支架的后端下两侧各有开孔,两个开孔外分别安装有内螺纹管及限位螺杆,传感转动臂下端位于两只限位螺杆之间,传感转动臂下端两侧和两只限位螺杆内侧之间分别有限位弹簧;所述传感器过渡连接支架前端安装在支架的后外侧;所述传感转动臂后侧具有导向板,转动臂限位支撑设备安装在传感器过渡连接支架后侧上,导向板一侧端安装有连接板,传感夹头、感应挡片安装在连接板一侧端;所述定位夹头安装在支架一侧外;所述传感器过渡连接支架后端安装有固定壳,距离传感器、到边检测传感器分别安装在固定壳内,气缸推缆设备、水平光电开关分别安装在固定壳后侧。
4、进一步地,所述感应挡片的和距离传感器的探测头处于一个水平面,感应挡片的高度高于到边检测传感器的探测头高度。
5、进一步地,所述传感转动臂两侧和限位弹簧内侧分别接触。
6、进一步地,所述转动臂限位支撑设备包括固定架、轴承,固定架侧端安装有轴杆,轴承的内圈安装在轴杆的外侧端,固定架的下端安装在传感器过渡连接支架后侧端上,传感转动臂的导向板滑动位于两只轴承的外圈之间。
7、进一步地,所述气缸推缆设备包括气缸和支架、滚轮,气缸的活塞杆和支架的一端安装在一起,滚轮转动安装在支架另一端。
8、本实用新型有益效果是:本新型协同放线控制机构使用,传感夹头、定位夹头夹紧导线后,plc控制放线控制机构的电动滑台按照指令以一定规律控制排线器沿收线盘由左至右、由右至左运动,同时结合距离传感器输入的线缆状态信号,控制电动滑台等的工作方式,使得线缆能有效盘绕在收线盘上。本新型中,排线器本体当向左或右排线,线缆发生向左超前(右排时为延后)、向右延后(右排时为超前)、正常拉直状态时,线缆带动传感夹头及感应挡片左或右运动,进而距离传感器精准输出模拟量电压信号到plc;由于本新型传感转动臂侧端通过转动臂限位支撑组的上下端轴承限位导向和支承,提高了包括传感转动臂回到初始位置的运动灵活性,这样,传感转动臂及传感片转动灵活,使得距离传感器输出信号的更准确,且能通过到边检测传感器的信号控制气缸推缆机构工作方式,推动线缆有效接触收线盘内侧一端,为plc控制排线器准确左或右运动实现紧密且高质量收线起到了有利技术支持。基于上述,所以本实用新型具有好的应用左景。
技术特征:
1.新型闭环传感控制的排线器,包括支架、定位夹头、传感器过渡连接支架、传感转动臂、转动臂限位支撑设备、传感夹头、感应挡片、距离传感器、到边检测传感器、水平光电开关、气缸推缆设备;其特征在于,所述支架的前端和放线控制机构的控制臂后端安装在一起,支架后端是开放式结构,传感转动臂前端转动安装在支架的后端前部上;所述支架的后端下两侧各有开孔,两个开孔外分别安装有内螺纹管及限位螺杆,传感转动臂下端位于两只限位螺杆之间,传感转动臂下端两侧和两只限位螺杆内侧之间分别有限位弹簧;所述传感器过渡连接支架前端安装在支架的后外侧;所述传感转动臂后侧具有导向板,转动臂限位支撑设备安装在传感器过渡连接支架后侧上,导向板一侧端安装有连接板,传感夹头、感应挡片安装在连接板一侧端;所述定位夹头安装在支架一侧外;所述传感器过渡连接支架后端安装有固定壳,距离传感器、到边检测传感器分别安装在固定壳内,气缸推缆设备、水平光电开关分别安装在固定壳后侧。
2.根据权利要求1所述的新型闭环传感控制的排线器,其特征在于,感应挡片的和距离传感器的探测头处于一个水平面,感应挡片的高度高于到边检测传感器的探测头高度。
3.根据权利要求1所述的新型闭环传感控制的排线器,其特征在于,传感转动臂两侧和限位弹簧内侧分别接触。
4.根据权利要求1所述的新型闭环传感控制的排线器,其特征在于,转动臂限位支撑设备包括固定架、轴承,固定架侧端安装有轴杆,轴承的内圈安装在轴杆的外侧端,固定架的下端安装在传感器过渡连接支架后侧端上,传感转动臂的导向板滑动位于两只轴承的外圈之间。
5.根据权利要求1所述的新型闭环传感控制的排线器,其特征在于,气缸推缆设备包括气缸和支架、滚轮,气缸的活塞杆和支架的一端安装在一起,滚轮转动安装在支架另一端。
技术总结
新型闭环传感控制的排线器,包括支架、定位夹头、传感器过渡连接支架、传感转动臂、转动臂限位支撑设备、传感夹头、感应挡片、距离传感器、到边检测传感器、水平光电开关、气缸推缆设备;定位夹头、传感器过渡连接支架、传感转动臂、转动臂限位支撑设备、传感夹头、感应挡片、距离传感器、到边检测传感器、水平光电开关、气缸推缆设备安装在一起。本新型排线器本体当向左或右排线,线缆发生向左超前、向右延后时,距离传感器会精准输出模拟量电压信号到PLC;传感转动臂及传感片转动灵活,使得距离传感器输出信号的更准确,且能通过到边检测传感器的信号控制气缸推缆机构工作方式,推动线缆有效接触收线盘内侧一端,为高质量收线起到了技术支持。
技术研发人员:刘明镜,韩磊,左传龙,吴德旺,韩景龙
受保护的技术使用者:上海鹰准信息技术有限公司
技术研发日:20230713
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!