一种复杂零件多机台上下料工作站的制作方法
本技术涉及一种工作站,尤其涉及一种复杂零件多机台上下料工作站。
背景技术:
1、工件是指制造过程中的一个产品部件,也叫制件、作件、课件、五金件等。零件种类繁多,但在加工的时候都需要打磨、清洗等工序。
2、对于复杂零部件产品的加工,在实际生产中需要很多工序的加工,但是现有的设备仅满足单工序的加工,在加工过程中,需要进行产品的转运,从而浪费了有效加工时间,是工人劳动强度增大,所以研发一种可多工序加工的模块化生产装置,节约工人劳动强度,增大加工效率是亟需解决的问题。
技术实现思路
1、本实用新型旨在解决上述缺陷,提供一种复杂零件多机台上下料工作站。
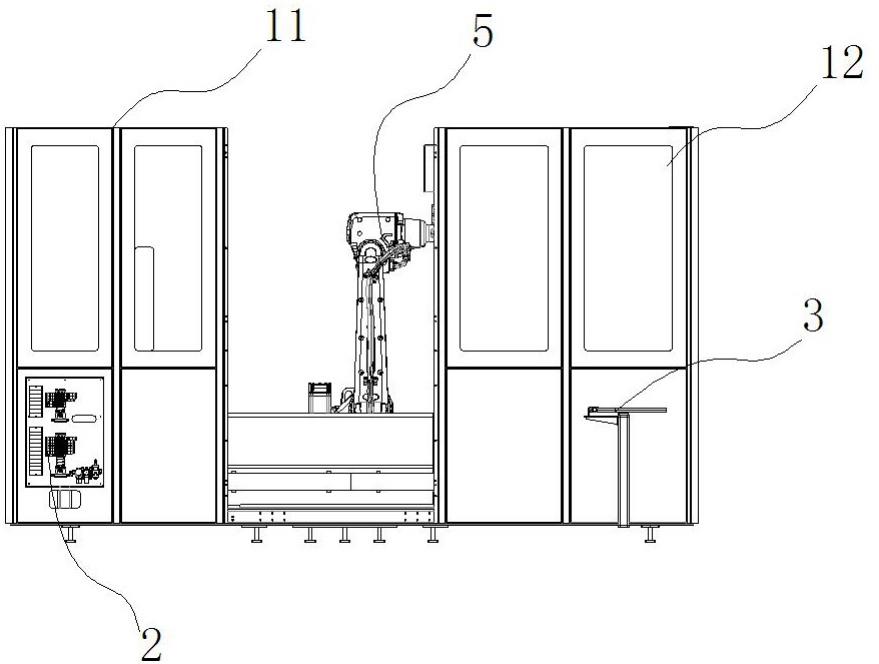
2、为了克服背景技术中存在的缺陷,本实用新型解决其技术问题所采用的技术方案是:这种复杂零件多机台上下料工作站包括第一工作仓、第二工作仓和位于第一工作仓、第二工作仓之间的关节机器人,第一工作仓内设有气动减压集成模块和清洁装置,所述第二工作仓内设有回转平台、放置各种手抓的手抓放置平台、agv接驳站和缓存平台,所述agv接驳站和缓存平台位于第二工作仓内的中间位置、并且前后设置,回转平台和手抓放置平台位于第二工作仓内的侧边位置,第二工作仓的前端设有agv升降门,agv接驳站位于agv升降门的后方,所述关节机器人的前端配合连接各种手抓,关节机器人通过管道与气动减压集成模块连接、并与手抓连通,所述关节机器人的前端配合连接各种手抓,关节机器人通过管道与气动减压集成模块连接、并与手抓连通。
3、根据本实用新型的另一个实施例,进一步包括所述第一工作仓的侧面设有防护检修门。
4、根据本实用新型的另一个实施例,进一步包括所述agv接驳站包括固定支腿,固定支腿的上端设有2个对称的用于检测有无料盘的检查装置以及架设于检查装置上端的料盘,所述一个检查装置上设有定位装置、另一个检查装置上设有压紧装置,所述检查装置的前端连接缓存装置。
5、根据本实用新型的另一个实施例,进一步包括所述2个对称检查装置上设有用于料盘四角定位的定位底板,以及用于料盘两侧定位的阻挡板。
6、根据本实用新型的另一个实施例,进一步包括所述手抓放置平台包括安装在第二工作仓内的直角三角形形状的固定架,固定架的一条直角边的上平面上放置手抓、下平面上设有手抓检测装置,手抓通过手抓定位销固定,固定架的另一条直角边将整体固定在第二工作仓的侧面。
7、本实用新型的有益效果是:这种复杂零件多机台上下料工作站通过配置不同型号的手抓可以正对各种零件进行加工,利用关节机器人进行中间手抓的转换,整体结构减少的人工投入,并且生产效率更高。
技术特征:
1.一种复杂零件多机台上下料工作站,包括第一工作仓(11)、第二工作仓(12)和位于第一工作仓(11)、第二工作仓(12)之间的关节机器人(5),其特征在于:所述第一工作仓(11)内设有气动减压集成模块(2)和清洁装置(4),所述第二工作仓(12)内设有回转平台(6)、放置各种手抓(22)的手抓放置平台(7)、agv接驳站(8)和缓存平台(9),所述agv接驳站(8)和缓存平台(9)位于第二工作仓(12)内的中间位置、并且前后设置,回转平台(6)和手抓放置平台(7)位于第二工作仓(12)内的侧边位置,第二工作仓(12)的前端设有agv升降门(10),agv接驳站(8)位于agv升降门(10)的后方,所述关节机器人(5)的前端配合连接各种手抓(22),关节机器人(5)通过管道与气动减压集成模块(2)连接、并与手抓(22)连通。
2.如权利要求1所述的复杂零件多机台上下料工作站,其特征在于:第一工作仓(11)的侧面设有防护检修门(1)。
3.如权利要求1所述的复杂零件多机台上下料工作站,其特征在于:所述agv接驳站(8)包括固定支腿(13),固定支腿(13)的上端设有2个对称的用于检测有无料盘的检查装置(14)以及架设于检查装置(14)上端的料盘(16),所述一个检查装置(14)上设有定位装置(18)、另一个检查装置(14)上设有压紧装置(15),所述检查装置(14)的前端连接缓存装置(21)。
4.如权利要求3所述的复杂零件多机台上下料工作站,其特征在于:所述2个对称检查装置(14)上设有用于料盘(16)四角定位的定位底板(20),以及用于料盘(16)两侧定位的阻挡板(17)。
5.如权利要求1所述的复杂零件多机台上下料工作站,其特征在于:所述手抓放置平台(7)包括安装在第二工作仓(12)内的直角三角形形状的固定架(23),固定架(23)的一条直角边的上平面上放置手抓(22)、下平面上设有手抓检测装置(24),手抓(22)通过手抓定位销(25)固定,固定架(23)的另一条直角边将整体固定在第二工作仓(12)的侧面。
技术总结
本技术涉及机械加工的技术领域,尤其涉及一种复杂零件多机台上下料工作站。这种复杂零件多机台上下料工作站包括第一工作仓、第二工作仓和位于第一工作仓、第二工作仓之间的关节机器人,第一工作仓内设有气动减压集成模块和清洁装置,所述第二工作仓内设有回转平台、放置各种手抓的手抓放置平台、AGV接驳站和缓存平台,所述AGV接驳站和缓存平台位于第二工作仓内的中间位置、并且前后设置,回转平台和手抓放置平台位于第二工作仓内的侧边位置,第二工作仓的前端设有AGV升降门,AGV接驳站位于AGV升降门的后方,所述关节机器人的前端配合连接各种手抓,关节机器人通过管道与气动减压集成模块连接、并与手抓连通,所述关节机器人的前端配合连接各种手抓,关节机器人通过管道与气动减压集成模块连接、并与手抓连通。
技术研发人员:王海晶,周飞,王仓宝
受保护的技术使用者:海力特机器人常州有限公司
技术研发日:20230721
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!