一种三连杆取件机的制作方法
本技术涉及取件机,具体是涉及一种三连杆取件机。
背景技术:
1、随着经济的不断发展及科学技术的不断进步,为生产制造行业的蓬勃发展提供了强有力的技术及物质支撑,从而加速了生产制造行业的发展步伐。而在压铸行业中,离不开压铸机的使用。且众所周知,压铸机就是在压力作用下把熔融金属液压射到成型模中冷却成型,开模后得到固体金属的压铸件。随着科学技术和工业生产的不断进步,尤其是汽车、摩托车以及家用电器等工业的蓬勃发展,使得压铸技术已获得极其迅速的发展,从而使得压铸机得到广泛的普及。目前在压铸生产的工过程中,当完成压铸成型之后需要从压铸机上取出压铸产品,原由人工取出,随着工业的发展,取件机取代人工在制造行业中的应用越来越多。通过应用取件机可以将工人从简单重复、以及危险系数高的取件工序中解放出来,降低了用工成本,同时提高了生产效率。如中国专利(申请号:201810329453 .7)提供了一种立式连杆伺服取件机械手臂,该立式连杆伺服取件机械手臂包括平台,所述平台上设置有机身,机身通过主动杆和从动杆连接机械臂,所述机械臂连接自由端,所述自由端包括旋转机构和取件机构,所述取件机构包括第五驱动装置和抓手。
2、但上述现有技术披露的一种立式连杆伺服取件机械手臂,其机械臂的结构单一,稳定性不高,其抓手在夹取零件后运行时甩动幅度大,稳定性不高,影响取件机的工作效率和准确性,尤其是压铸产品较大时,机械臂在取件后的运动惯性更大,会造成机械臂连杆剧烈抖动,长时间很容易断裂,从而影响机器的稳定性。同时该取件机械手臂只具备前后滑动和旋转两个自由度,而在实际使用的过程中,由于其平台固定不动,导致整体的移动范围有限,在抓取零部件时,会导致机械臂与压铸机产生干涉,影响运行,其取件、运送的精度难以达到现代工业化生产对于压铸件抓取和运送的要求。
3、故有必要对现有技术加以改进。
技术实现思路
1、本实用新型的目的在于针对现有技术的缺陷和不足,提供一种三连杆取件机,其对机械臂的形状进行优化,同时对主动轴、从动轴的相对位置进行了调整,并对主动杆、从动杆、连杆的尺寸进行了优化,使得夹爪的转动角加速度变小,从而使夹爪在夹取零件后运行时的甩动幅度更小,稳定性更高,提高了取件机的工作效率和准确性。机械臂的平缓运行也减小了主动杆、从动杆、连杆间因惯性产生的冲击力,延长了取件机的使用寿命。同时其通过升降机构、滑动机构、取件机构之间的相互配合可实现多自由度的调整,使得本实用新型的机械臂活动范围大,灵活度好,精度高,自动化程度高,取件、运送的精度可以很好满足现代工业化生产对于压铸件抓取和运送的要求。
2、为实现上述目的,本实用新型采用以下技术方案:
3、一种三连杆取件机,包括升降机构、滑动机构、取件机构,所述滑动机构设置于升降机构的上端,所述取件机构固定地安装于滑动机构的上端,所述取件机构包括基座、主动轴、从动轴、主动杆、从动杆、连杆、第一驱动装置、铰接箱、机械臂及夹取头,所述主动轴设置于从动轴的侧后方,所述第一驱动装置安装于基座的下方,且第一驱动装置的输出端穿过基座,所述主动轴传动地连接于第一驱动装置的输出端,所述主动杆的第一端铰接于主动轴,所述主动杆的第二端与所述连杆的第一端铰接,所述连杆的第二端与铰接箱固定连接,所述从动杆的第一端铰接于从动轴,所述从动杆的第二端铰接于铰接箱,所述机械臂的第一端传动地安装于铰接箱,所述夹取头安装于机械臂的第二端。
4、进一步的,所述取件机构还包括第二驱动装置,所述第二驱动装置安装于铰接箱内。
5、进一步的,所述机械臂包括第一机械臂和可伸缩地套接于第一机械臂第二端的第二机械臂,所述第一机械臂的第一端传动地安装于第二驱动装置的输出端,所述第二机械臂的另一端设置有夹取头。
6、进一步的,所述夹取头包括夹爪和驱使夹爪张闭配合的第三驱动装置。
7、进一步的,还包括底座安装机构,所述升降机构设置于底座安装机构的上端,所述底座安装机构包括底板及固定安装于底板上端的立柱。
8、进一步的,所述的升降机构包括上安装板、下安装板、摇轮、螺杆、第一齿轮、导柱、导套及锁紧块,所述下安装板固定地安装于立柱的上端,所述螺杆与上安装板固定地连接并穿过下安装板,所述摇轮与所述第一齿轮固定连接,所述第一齿轮安装于下安装板下方,所述第一齿轮与螺杆啮合连接,所述导柱的上端固定地安装于上安装板,所述导柱的下端套接有导套,所述立柱为中空立柱,所述导套穿过下安装板并插入立柱内,所述导套通过锁紧块进行锁紧,所述立柱、导柱、导套及锁紧块的数量一一对应。
9、进一步的,所述的滑动机构包括安装座、滑动箱、第二齿轮、齿杆、安装侧板及第四驱动装置,所述安装座固定地安装于升降机构上端,所述安装座右侧固定地安装有安装侧板,所述安装座上端及安装侧板的左侧均安装有滑槽,所述滑动箱的下端及右侧分别固定地安装有与所述滑槽相配合的滑轨,所述安装侧板的右侧固定地安装有第四驱动装置,所述第四驱动装置的输出端穿过安装侧板,所述安装侧板的左侧安装有第二齿轮,所述第二齿轮传动地安装于第四驱动装置的输出端,所述安装侧板的左侧还固定地安装有与所述第二齿轮啮合安装的齿杆。
10、进一步的,所述的第一驱动装置、第二驱动装置及第四驱动装置均为电机。
11、进一步的,所述的第三驱动装置为气缸。
12、进一步的,还包括感应机构,所述感应机构固定地安装于升降机构的一侧,所述感应机构包括固定地安装于升降机一侧的竖杆,所述竖杆的顶端固定地安装有一横杆,所述横杆远离竖杆的一端安装有感应探头。
13、采用上述结构后,本实用新型有益效果为:
14、1.本实用新型所述的一种三连杆取件机,其将机械臂的形状进行优化,并且将主动轴设置于从动轴的侧后方,同时还对各连杆的尺寸进行优化。优化后的三连杆取件机,其机械臂的一侧设置有主动杆、从动杆和连杆共同组成的驱动机构,主动杆在电机输出轴的带动下转动,主动杆带动连杆转动,连杆与机械臂固定连接,机械臂跟随转动,同时在从动杆连接限制作用下,机械臂按设计的轨迹往返运动进行夹放工作,本实用新型使得机械臂夹取产品力的作用点到机械臂旋转中心的距离变大,进一步地使得夹爪的转动角加速度变小,从而使夹爪在夹取零件后运行时的甩动幅度更小,稳定性更高,提高了取件机的工作效率和准确性,机械臂的平缓运行也减小了主动杆、从动杆、连杆间因惯性产生的冲击力,延长了取件机的使用寿命。
15、2.本实用新型所述的一种三连杆取件机,其通过升降机构可实现取件机构的高低可调,通过滑动机构可实现取件机构的前后可调,通过取件机构的主动轴、从动轴、主动杆、从动杆及连杆可实现机械臂水平方向的的旋转,同时机械臂在第二驱动装置的驱动下,可实现周向方向的旋转,总体而言,本实用新型可实现多自由度的调整,使得本实用新型的机械臂活动范围大,灵活度好,精度高,自动化程度高,取件、运送的精度可以很好满足现代工业化生产对于压铸件抓取和运送的要求。
技术特征:
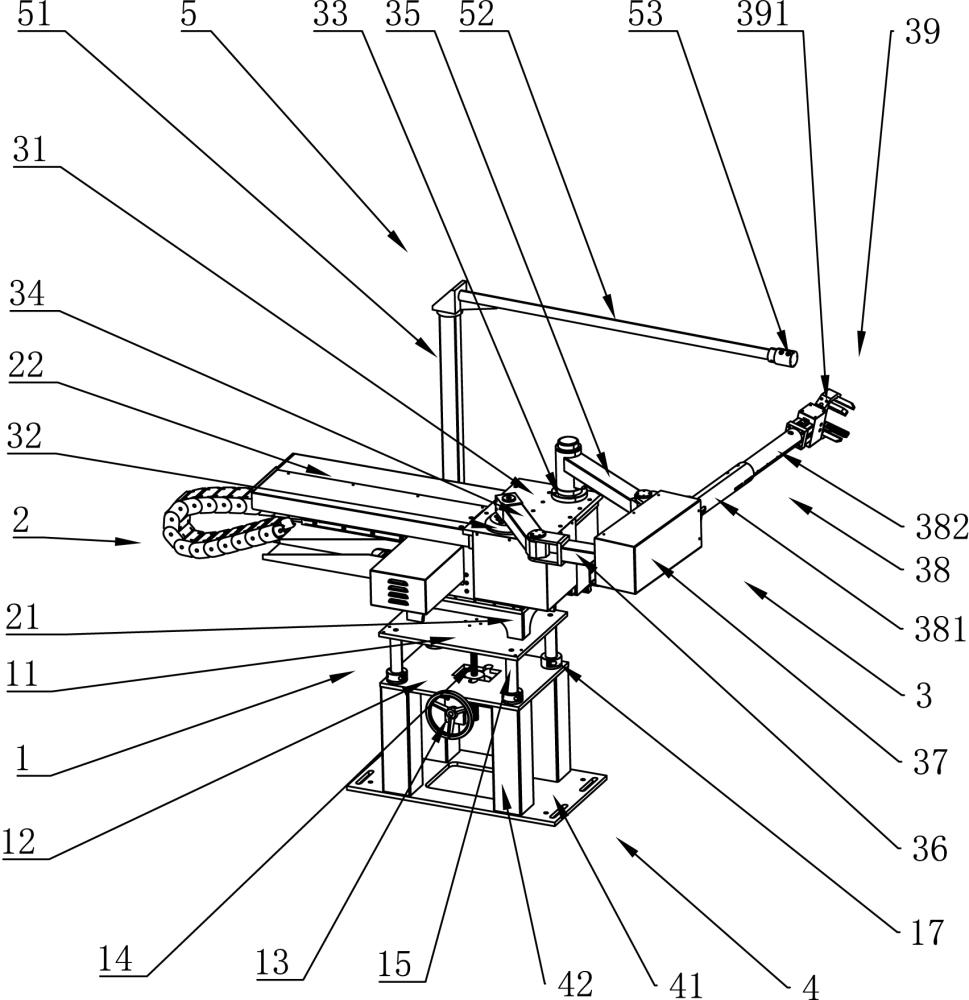
1.一种三连杆取件机,包括升降机构(1)、滑动机构(2)、取件机构(3),其特征在于:所述滑动机构(2)设置于升降机构(1)的上端,所述取件机构(3)固定地安装于滑动机构(2)的上端,所述取件机构(3)包括基座(31)、主动轴(32)、从动轴(33)、主动杆(34)、从动杆(35)、连杆(36)、第一驱动装置、铰接箱(37)、机械臂(38)及夹取头(39),所述主动轴(32)设置于从动轴(33)的侧后方,所述第一驱动装置安装于基座(31)的下方,且第一驱动装置的输出端穿过基座(31),所述主动轴(32)传动地连接于第一驱动装置的输出端,所述主动杆(34)的第一端铰接于主动轴(32),所述主动杆(34)的第二端与所述连杆(36)的第一端铰接,所述连杆(36)的第二端与铰接箱(37)固定连接,所述从动杆(35)的第一端铰接于从动轴(33),所述从动杆(35)的第二端铰接于铰接箱(37),所述机械臂(38)的第一端传动地安装于铰接箱(37),所述夹取头(39)安装于机械臂(38)的第二端。
2.根据权利要求1所述的一种三连杆取件机,其特征在于:所述取件机构(3)还包括第二驱动装置(385),所述第二驱动装置(385)安装于铰接箱(37)内。
3.根据权利要求2所述的一种三连杆取件机,其特征在于:所述机械臂(38)包括第一机械臂(381)和可伸缩地套接于第一机械臂(381)第二端的第二机械臂(382),所述第一机械臂(381)的第一端传动地安装于第二驱动装置(385)的输出端,所述第二机械臂(382)的另一端设置有夹取头(39)。
4.根据权利要求1所述的一种三连杆取件机,其特征在于:所述夹取头(39)包括夹爪(391)和驱使夹爪(391)张闭配合的第三驱动装置(392)。
5.根据权利要求1所述的一种三连杆取件机,其特征在于:还包括底座安装机构(4),所述升降机构(1)设置于底座安装机构(4)的上端,所述底座安装机构(4)包括底板(41)及固定安装于底板(41)上端的立柱(42)。
6.根据权利要求5所述的一种三连杆取件机,其特征在于:所述的升降机构(1)包括上安装板(11)、下安装板(12)、摇轮(13)、螺杆(14)、第一齿轮、导柱(15)、导套(16)及锁紧块(17),所述下安装板(12)固定地安装于立柱(42)的上端,所述螺杆(14)与上安装板(11)固定地连接并穿过下安装板(12),所述摇轮(13)与所述第一齿轮固定连接,所述第一齿轮安装于下安装板(12)下方,所述第一齿轮与螺杆(14)啮合连接,所述导柱(15)的上端固定地安装于上安装板(11),所述导柱(15)的下端套接有导套(16),所述立柱(42)为中空立柱,所述导套(16)穿过下安装板(12)并插入立柱(42)内,所述导套(16)通过锁紧块(17)进行锁紧,所述立柱(42)、导柱(15)、导套(16)及锁紧块(17)的数量一一对应。
7.根据权利要求2所述的一种三连杆取件机,其特征在于:所述的滑动机构(2)包括安装座(21)、滑动箱(22)、第二齿轮(25)、齿杆(26)、安装侧板(27)及第四驱动装置,所述安装座(21)固定地安装于升降机构(1)上端,所述安装座(21)右侧固定地安装有安装侧板(27),所述安装座(21)上端及安装侧板(27)的左侧均安装有滑槽(23),所述滑动箱(22)的下端及右侧分别固定地安装有与所述滑槽(23)相配合的滑轨(24),所述安装侧板(27)的右侧固定地安装有第四驱动装置,所述第四驱动装置的输出端穿过安装侧板(27),所述安装侧板(27)的左侧安装有第二齿轮(25),且所述第二齿轮(25)传动地安装于第四驱动装置的输出端,所述安装侧板(27)的左侧还固定地安装有与所述第二齿轮(25)啮合安装的齿杆(26)。
8.根据权利要求7所述的一种三连杆取件机,其特征在于:所述的第一驱动装置、第二驱动装置(385)及第四驱动装置均为电机。
9.根据权利要求4所述的一种三连杆取件机,其特征在于:所述的第三驱动装置(392)为气缸。
10.根据权利要求1至9任一项所述的一种三连杆取件机,其特征在于:还包括感应机构(5),所述感应机构(5)固定地安装于升降机构(1)的一侧,所述感应机构(5)包括固定地安装于升降机一侧的竖杆(51),所述竖杆(51)的顶端固定地安装有一横杆(52),所述横杆(52)远离竖杆(51)的一端安装有感应探头(53)。
技术总结
本技术涉及一种三连杆取件机,其包括升降机构、滑动机构、取件机构,所述滑动机构设置于升降机构的上端,所述取件机构固定地安装于滑动机构,所述取件机构包括基座、主动轴、从动轴、主动杆、从动杆、连杆、第一驱动装置、铰接箱、机械臂及夹取头。本技术使得夹爪的转动角加速度变小,从而使夹爪在运行时的甩动幅度更小,稳定性更高,提高了工作效率和准确性,机械臂的平缓运行也延长了取件机的使用寿命。通过升降机构、滑动机构、取件机构之间的相互配合可实现多自由度的调整,使得本技术的机械臂活动范围大,灵活度好,精度高,自动化程度高,取件、运送的精度可以很好满足现代工业化生产对于压铸件抓取和运送的要求。
技术研发人员:孙仲献
受保护的技术使用者:宁波市科卓自动化科技有限公司
技术研发日:20230721
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!