一种物流仓储装卸用的人工智能机械臂的制作方法
本技术物流运输装卸的,特别涉及一种物流仓储装卸用的人工智能机械臂。
背景技术:
1、物流过程中,需要对所需运输的货物进行装卸等操作,为确保装卸的准确性,提高装卸效率,降低人工成本,通常使用专门的装卸设备对货物实现装卸,以代替人工装卸。
2、一般的智能手臂,通过转动关节、机械手臂、抓取装置的设置,实现对所需运输货物的运输,但该种方式的抓取装置结构单一,不能面对多种情况,提供所需不同的抓手,提高装卸效率,中国专利公开了申请号为“cn201910417721.5”的一种用于装卸原料的仿生机械手臂,包括底座,所述底座的上表面左侧安装有安装柱,所述安装柱的外侧套接有转动座,所述第三减速电机的输出端贯穿底座固定套接有与第一齿轮啮合的第二齿轮,所述转动座的上表面安装有安装壳体,所述第一转轴的两侧均固定套接有链轮,所述u型壳体的上表面中部设有第一方形孔,所述螺纹杆的外侧螺纹连接有螺纹滑块,所述螺纹滑块的上表面与t型杆固定连接,所述连接杆的下端安装有翻转装置,所述翻转装置的左侧安装有夹紧装置。本发明和现有技术相比,结构简单,制造成本低,使用安全稳定,能够大大提高机械手臂的工作范围,大大提高机械手臂的使用效果,值得大力推广使用。但并未解决上述抓取结构单一的问题。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种物流仓储装卸用的人工智能机械臂,通过第二球形关节处设置三个不同的机械手臂,满足面对不同情况,提供适合的抓取抓手,提高工作效率。
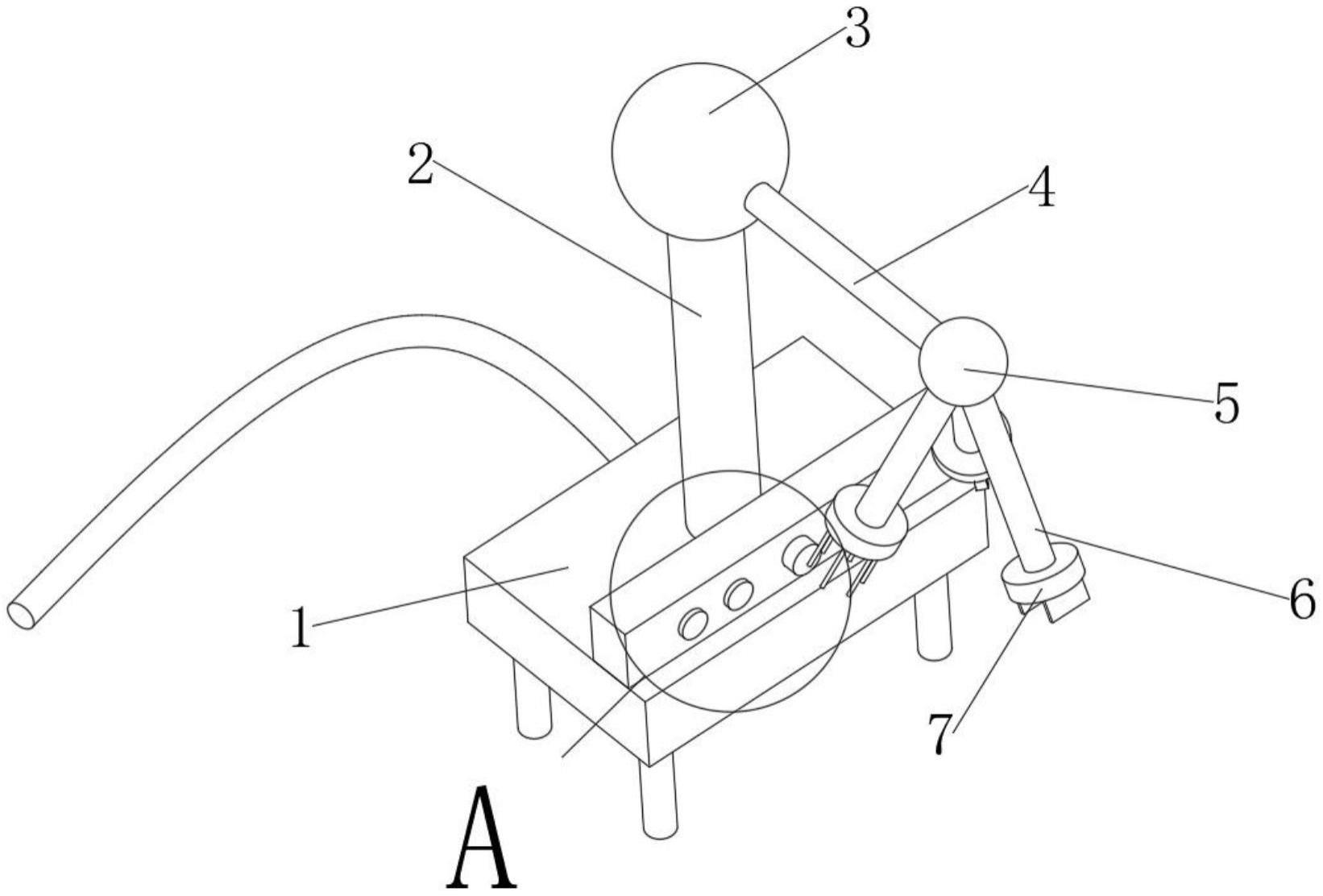
2、本实用新型还提供具有上述一种物流仓储装卸用的人工智能机械臂,包括:电动伸缩杆,所述电动伸缩杆底座固定连接在支撑机体上,所述电动伸缩杆输出端转动连接有第一球形连接器,所述第一球形连接器输出端固定连接有第一机械运动臂,所述第一机械运动臂输出端转动连接有第二球形连接器,所述第二球形连接器输出端固定连接有第二机械运动臂、第三机械运动臂、第四机械运动臂。通过第二球形关节处设置三个不同的机械手臂,满足面对不同情况,提供适合的抓取抓手,提高工作效率。
3、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述支撑机体底端设置有接触保护层,所述支撑机体通过连接柱固定在工作平台上。
4、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述第二机械运动臂输出端转动连接有转动承接盘,所述转动承接盘上固定连接有螺栓固定抓手。
5、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述第三机械运动臂输出端转动连接有转动承接盘,所述转动承接盘输出端固定连接有抓钩固定抓手。
6、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述第四机械运动臂输出端转动连接有转动承接盘,所述转动承接盘输出端固定连接有夹具固定抓手。
7、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述支撑机体前端固定连接有检测机体,所述检测机体表面设置有检测摄像头,所述检测摄像头侧端设置有控制按钮。
8、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述支撑机体后端设置有数据传输线,所述数据传输线接通监测屏幕。
9、根据本实用新型所述的一种物流仓储装卸用的人工智能机械臂,所述支撑机体通过控制按钮近程操作,所述支撑机体也可通过遥控远程操作。
10、有益效果
11、1、与现有技术相比,该一种物流仓储装卸用的人工智能机械臂通过第二球形关节处设置三个不同的机械手臂,满足面对不同情况,提供适合的抓取抓手,提高工作效率。
12、2、与现有技术相比,该一种物流仓储装卸用的人工智能机械臂通过在设置检测机体及其附件检测摄像头,对所需装卸货物的接口处进行观察,选择合适的抓取抓手。
技术特征:
1.一种物流仓储装卸用的人工智能机械臂,其特征在于,包括:
2.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述支撑机体(1)底端设置有接触保护层(18),所述支撑机体(1)通过连接柱(8)固定在工作平台上。
3.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述第二机械运动臂(6)输出端转动连接有转动承接盘(7),所述转动承接盘(7)上固定连接有螺栓固定抓手(10)。
4.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述第三机械运动臂(13)输出端转动连接有转动承接盘(7),所述转动承接盘(7)输出端固定连接有抓钩固定抓手(11)。
5.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述第四机械运动臂(14)输出端转动连接有转动承接盘(7),所述转动承接盘(7)输出端固定连接有夹具固定抓手(12)。
6.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述支撑机体(1)前端固定连接有检测机体(16),所述检测机体(16)表面设置有检测摄像头(15),所述检测摄像头(15)侧端设置有控制按钮(17)。
7.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述支撑机体(1)后端设置有数据传输线(9),所述数据传输线(9)接通监测屏幕。
8.根据权利要求1所述的一种物流仓储装卸用的人工智能机械臂,其特征在于,所述支撑机体(1)通过控制按钮(17)近程操作,所述支撑机体(1)也可通过遥控远程操作。
技术总结
本技术公开了一种物流仓储装卸用的人工智能机械臂,其包括:电动伸缩杆,所述电动伸缩杆底座固定连接在支撑机体上,所述电动伸缩杆输出端转动连接有第一球形连接器,所述第一球形连接器输出端固定连接有第一机械运动臂,所述第一机械运动臂输出端转动连接有第二球形连接器,所述第二球形连接器输出端固定连接有第二机械运动臂、第三机械运动臂、第四机械运动臂。通过第二球形关节处设置三个不同的机械手臂,满足面对不同情况,提供适合的抓取抓手,提高工作效率。
技术研发人员:谢想清
受保护的技术使用者:武汉平实村鸟供应链管理有限公司
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!