一种多级悬臂式自动化装车机器人及装车系统的制作方法
本技术涉及智能码垛,尤其是一种多级悬臂式自动化装车机器人及装车系统。
背景技术:
1、为了提高企业的市场竞争力,“降本增效”成了企业在各个生产环节不断探索的路径,尤其是生产制造型企业,在人工成本日益高涨的大环境下,进行智能智造的升级是企业应对快速变化的市场的必经之路。传统货箱的码垛是大多数情况下还是采用人工操作,效率低的同时成本还高。相关企业在该领域也在进行积极探索,专利号为cn201820799760.7,专利名称为“全自动智能码垛装车卸车系统”及专利号为cn201710405046.5,专利名称为“纸箱智能码垛装车系统及其装车方法”等方案均为相关企业在智能码垛领域的探索,但是,上述技术方案普遍存在结构复杂、生产制造和维护成本低等缺陷,一次性投入过大,不利于在中小型企业的推广应用。
技术实现思路
1、针对上述技术问题,本实用新型提出了一种多级悬臂式自动化装车机器人及装车系统,该自动化装车机器人采用多级悬臂式结构,运行灵活,结构简单,生产制造成本和后期维护成本均较低,适于推广应用。
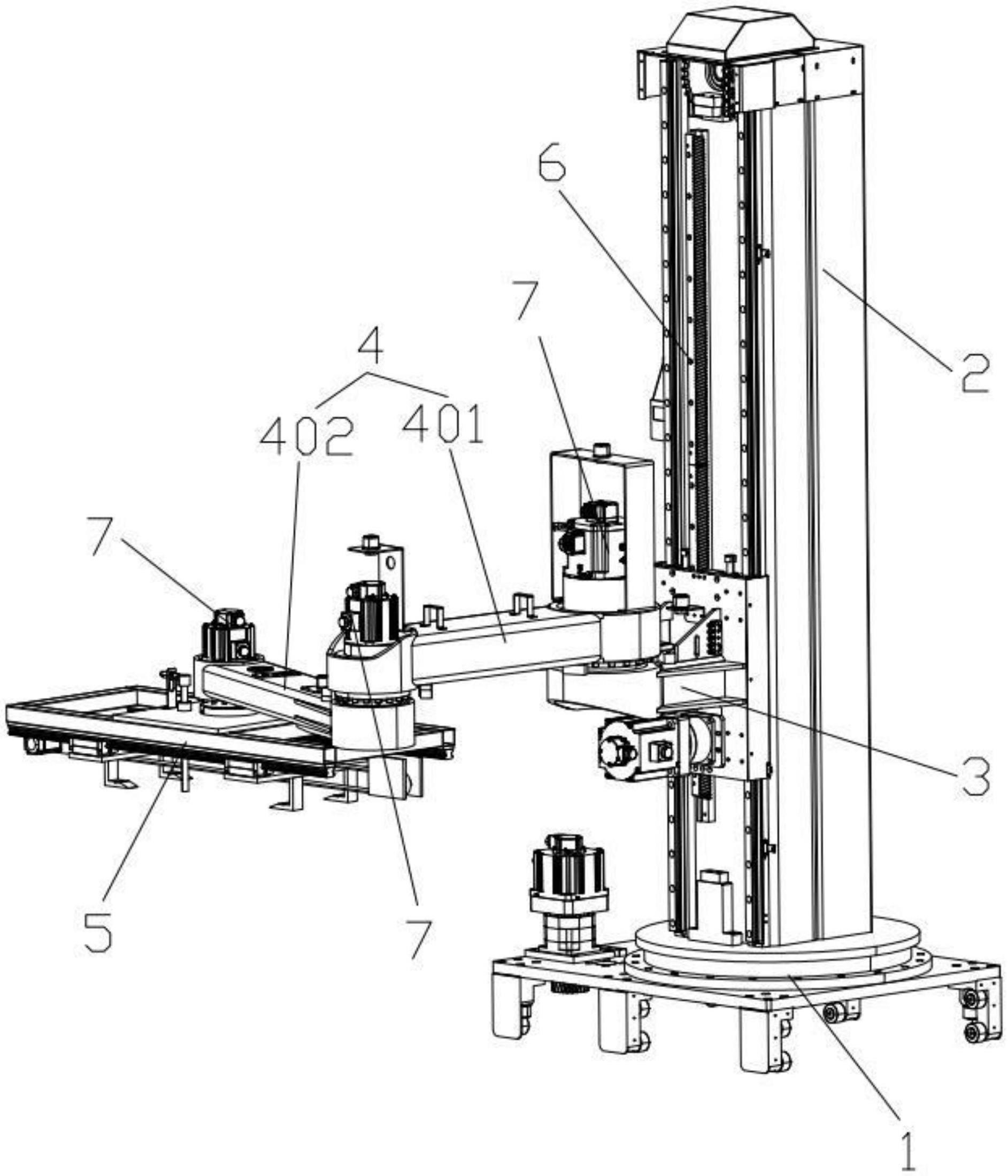
2、一种多级悬臂式自动化装车机器人,包括旋转座、立柱、升降座、旋转臂及夹具,所述立柱固定于旋转座上,所述旋转座能够驱动立柱轴向旋转,所述立柱的一侧固定有齿条轨道,所述升降座限位于齿条轨道上,与齿条轨道啮合传动,所述旋转臂水平设置有多级,多级旋转臂依次首尾相连,前一级旋转臂驱动后一级旋转臂水平旋转,首级所述旋转臂转动安装于升降座上,所述夹具安装于末级旋转臂下方,通过末级旋转臂驱动旋转。
3、作为上述技术方案的优选,所述旋转臂包括一级旋转臂和二级旋转臂,所述一级旋转臂位于升降座和二级旋转臂上方,所述一级旋转臂、二级旋转臂及夹具分别通过一组动力单元驱动。
4、作为上述技术方案的优选,所述夹具包括支撑架、伺服电机、皮带、滑块、抓钩、ccd相机,所述伺服电机固定于支撑架上,所述滑块滑动安装于支撑架上,所述皮带通过伺服电机驱动旋转,两块平行设置的滑块分别与皮带的上层皮带和下层皮带连接,皮带转动时,两块滑块相向或者背向移动,所述抓钩呈l型,抓钩相对固定于两块滑块底部,所述ccd相机固定于支撑架上,用于获取支撑架底部工件的图像信息。
5、作为上述技术方案的优选,所述支撑架上还安装有接近开关传感器,所述接近开关传感器用于检测夹具底部工件位置。
6、一种采用上述任意一项多级悬臂式自动化装车机器人的装车系统,包括齿条地轨、滚筒输送线,所述齿条地轨和滚筒输送线平行设置,所述旋转座限位于齿条地轨上,与齿条地轨啮合传动。
7、作为上述技术方案的优选,所述多级悬臂式自动装车机器人设有一组或者多组。
8、本实用新型的有益效果在于:
9、1、替代传统的人工码垛操作,码垛效率高,并且能够有效节省企业的用工成本。
10、2、采用模块化设计,结构简单,生产制造和后期维护成本均交底,能够降低企业的一次性投入使用成本,适于推广应用。
技术特征:
1.一种多级悬臂式自动化装车机器人,其特征在于:包括旋转座、立柱、升降座、旋转臂及夹具,所述立柱固定于旋转座上,所述旋转座能够驱动立柱轴向旋转,所述立柱的一侧固定有齿条轨道,所述升降座限位于齿条轨道上,与齿条轨道啮合传动,所述旋转臂水平设置有多级,多级旋转臂依次首尾相连,前一级旋转臂驱动后一级旋转臂水平旋转,首级所述旋转臂转动安装于升降座上,所述夹具安装于末级旋转臂下方,通过末级旋转臂驱动旋转。
2.根据权利要求1所述的多级悬臂式自动化装车机器人,其特征在于:所述旋转臂包括一级旋转臂和二级旋转臂,所述一级旋转臂位于升降座和二级旋转臂上方,所述一级旋转臂、二级旋转臂及夹具分别通过一组动力单元驱动。
3.根据权利要求1所述的多级悬臂式自动化装车机器人,其特征在于:所述夹具包括支撑架、伺服电机、皮带、滑块、抓钩、ccd相机,所述伺服电机固定于支撑架上,所述滑块滑动安装于支撑架上,所述皮带通过伺服电机驱动旋转,两块平行设置的滑块分别与皮带的上层皮带和下层皮带连接,皮带转动时,两块滑块相向或者背向移动,所述抓钩呈l型,抓钩相对固定于两块滑块底部,所述ccd相机固定于支撑架上,用于获取支撑架底部工件的图像信息。
4.根据权利要求3所述的多级悬臂式自动化装车机器人,其特征在于:所述支撑架上还安装有接近开关传感器,所述接近开关传感器用于检测夹具底部工件位置。
5.一种采用上述任意一项多级悬臂式自动化装车机器人的装车系统,其特征在于:包括齿条地轨、滚筒输送线,所述齿条地轨和滚筒输送线平行设置,所述旋转座限位于齿条地轨上,与齿条地轨啮合传动。
6.根据权利要求5所述的装车系统,其特征在于:所述多级悬臂式自动装车机器人设有一组或者多组。
技术总结
本技术公开了一种多级悬臂式自动化装车机器人及装车系统,多级悬臂式自动化装车机器人包括旋转座、立柱、升降座、旋转臂及夹具,所述立柱固定于旋转座上,所述旋转座能够驱动立柱轴向旋转,所述立柱的一侧固定有齿条轨道,所述升降座限位于齿条轨道上,与齿条轨道啮合传动,所述旋转臂水平设置有多级,多级旋转臂依次首尾相连,前一级旋转臂驱动后一级旋转臂水平旋转,首级所述旋转臂转动安装于升降座上,所述夹具安装于末级旋转臂下方,通过末级旋转臂驱动旋转。该自动化装车机器人采用多级悬臂式结构,运行灵活,结构简单,生产制造成本和后期维护成本均较低,适于推广应用。
技术研发人员:彭国亮,朱沈阳
受保护的技术使用者:湖南润邦智慧供应链有限公司
技术研发日:20230726
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!