一种轨道物流机器人的减震机构的制作方法
本技术涉及物流机器人,更具体地涉及一种轨道物流机器人的减震机构。
背景技术:
1、在医院的部分科室中,会使用轨道物流机器人进行运输药品,能够有效快速地进行配送。
2、经检索,公告号为cn208963927u的中国专利文件,公开了一种洁净手术室虚拟轨道物流机器人,解决手术室耗材的物流管理配套设施不完善,人员配比不合理问题,使配送更快速、准确,然而仍存在以下缺陷,在复杂的轨道行驶时,需要经常的切换行驶轨道,在切换时,由于轨道之间存在间隙,机器人切换轨道会产生震动,导致内部存放的药品晃动,倾倒,从而使药瓶损坏,药品无法使用。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种轨道物流机器人的减震机构,以解决上述背景技术中存在的问题。
2、本实用新型提供如下技术方案:一种轨道物流机器人的减震机构,包括机器人本体,所述机器人本体的底部开设有多个安装槽,安装槽内滑动连接有安装架,安装架的内部转动连接有轨道轮,多个所述安装架的一侧均固定连接有电机,且电机输出轴的一端穿过安装架并与轨道轮相固定,多个所述安装架的一侧均设有对轨道轮进行刹停的止停机构,多个所述安装架的顶部均固定连接有两个弹簧缓冲器,且弹簧缓冲器与安装槽的顶部内壁相固定,多个所述安装槽的内部均设有对安装架进一步避震的缓冲机构。
3、进一步的,所述缓冲机构包括两个连接杆一,两个连接杆一分别转动连接在安装槽的两侧内壁,两个所述连接杆一的一端分别转动连接有连接头,两个连接头之间固定连接有弹性气囊,两个所述连接头的一侧分别转动连接有连接杆二,且连接杆二与安装架转动连接,两个所述连接头的顶部均固定连接有橡胶块,橡胶块的顶端固定连接有第二摩擦块。
4、进一步的,相邻的两个所述连接杆一和连接杆二之间均固定连接有弹力板。
5、进一步的,两个所述连接头的底部均固定连接有复位弹簧,且复位弹簧与安装架相固定。
6、进一步的,所述止停机构包括多个避位槽,多个避位槽分别开设在多个安装架的一侧内壁,多个所述避位槽内均设有第一摩擦块,多个所述轨道轮的一侧均固定连接有摩擦环,多个所述安装架的一侧外壁固定连接有电动推杆,且电动推杆的一端穿过安装架并与第一摩擦块相固定。
7、进一步的,多个所述电动推杆的多侧均固定连接有固定块,且固定块与安装架相固定。
8、进一步的,多个所述轨道轮的圆周外壁均固定连接有橡胶环。
9、进一步的,多个所述安装架的顶部均固定连接有环型架,环型架的一侧转动连接有多个辅助辊,且辅助辊与橡胶环相接触。
10、本实用新型的技术效果和优点:
11、1.本实用新型通过弹簧缓冲器和缓冲机构的配合使用,物流机器人在进行轨道切换时,轨道轮带动安装架相对于机器人本体作向上运动,此时,弹簧缓冲器受力压缩并通过其本身的性能对机器人本体进行初步减震,同时,通过缓冲机构使安装架向上移动的动能通过摩擦力转换为热能并得到减少,从而使机器人本体得到进一步的减震,避免现有的物流机器人在复杂的轨道行驶时,由于轨道之间存在间隙,机器人切换轨道会产生震动,导致内部存放的药品晃动,倾倒,从而使药瓶损坏,药品无法使用的情况出现,提高了装置的减震效果。
12、2.本实用新型通过设有缓冲机构,连接头在两个连接杆一和连接杆二的作用下向里移动的同时并向上发生位移,从而使橡胶块发生形变,并使第二摩擦块在向里移动的过程中其与安装槽的摩擦力逐步增大,并产生热量,热量通过热传递至机器人本体底部的壳体上,并使其与空气的接触面积得到增加,进而使其得到快速散热,从而使安装架向上移动的动力得到消耗,从而使机器人本体得到进一步的减震,通过装置的使用效果。
13、3.本实用新型通过橡胶环和辅助辊的配合使用,橡胶环能够减少轨道轮与轨道之间的碰撞,进而使轨道轮在行驶时更加平稳,同时,通过辅助辊与橡胶环充分接触,使橡胶环得到抚平,进而延长橡胶环的使用寿命,提高了装置的防护效果。
技术特征:
1.一种轨道物流机器人的减震机构,包括机器人本体(1),其特征在于:所述机器人本体(1)的底部开设有多个安装槽(2),安装槽(2)内滑动连接有安装架(3),安装架(3)的内部转动连接有轨道轮(4),多个所述安装架(3)的一侧均固定连接有电机,且电机输出轴的一端穿过安装架(3)并与轨道轮(4)相固定,多个所述安装架(3)的一侧均设有对轨道轮(4)进行刹停的止停机构,多个所述安装架(3)的顶部均固定连接有两个弹簧缓冲器(9),且弹簧缓冲器(9)与安装槽(2)的顶部内壁相固定,多个所述安装槽(2)的内部均设有对安装架(3)进一步避震的缓冲机构。
2.根据权利要求1所述的一种轨道物流机器人的减震机构,其特征在于:所述缓冲机构包括两个连接杆一(5),两个连接杆一(5)分别转动连接在安装槽(2)的两侧内壁,两个所述连接杆一(5)的一端分别转动连接有连接头(7),两个连接头(7)之间固定连接有弹性气囊(8),两个所述连接头(7)的一侧分别转动连接有连接杆二(10),且连接杆二(10)与安装架(3)转动连接,两个所述连接头(7)的顶部均固定连接有橡胶块(20),橡胶块(20)的顶端固定连接有第二摩擦块(21)。
3.根据权利要求2所述的一种轨道物流机器人的减震机构,其特征在于:相邻的两个所述连接杆一(5)和连接杆二(10)之间均固定连接有弹力板(6)。
4.根据权利要求2所述的一种轨道物流机器人的减震机构,其特征在于:两个所述连接头(7)的底部均固定连接有复位弹簧(11),且复位弹簧(11)与安装架(3)相固定。
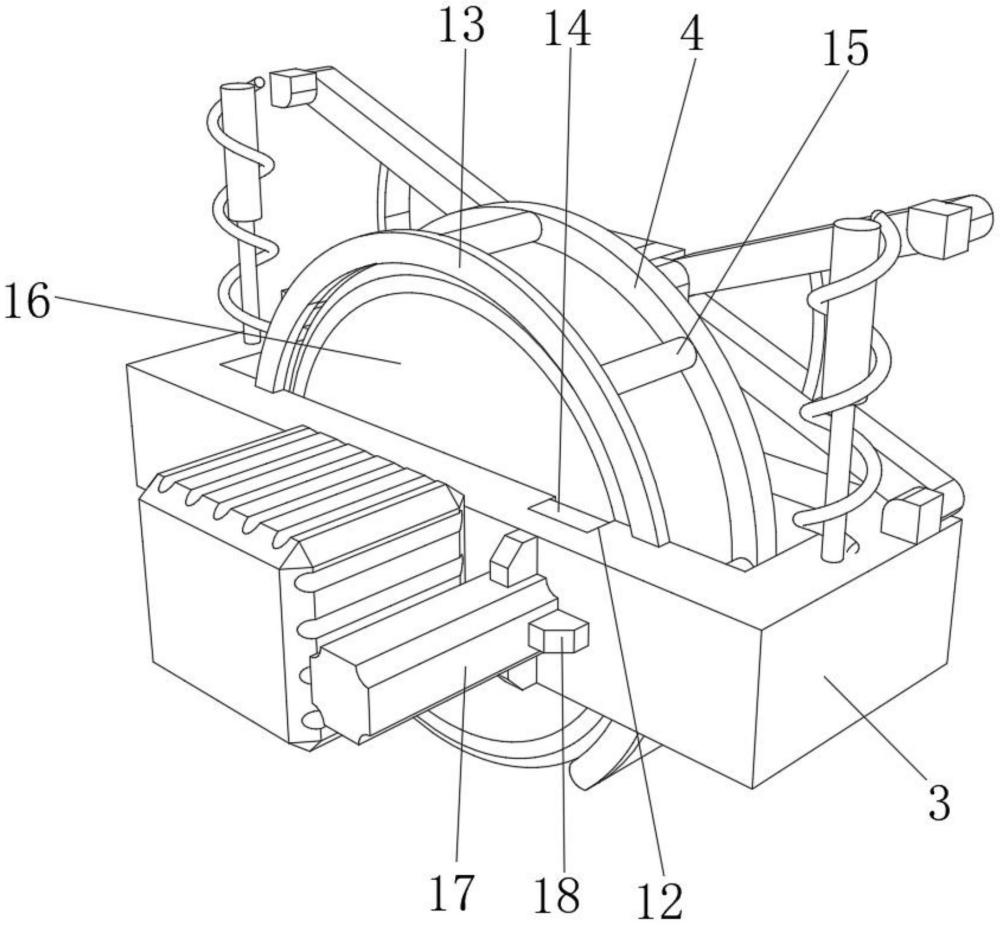
5.根据权利要求1所述的一种轨道物流机器人的减震机构,其特征在于:所述止停机构包括多个避位槽(12),多个避位槽(12)分别开设在多个安装架(3)的一侧内壁,多个所述避位槽(12)内均设有第一摩擦块(14),多个所述轨道轮(4)的一侧均固定连接有摩擦环(16),多个所述安装架(3)的一侧外壁固定连接有电动推杆(17),且电动推杆(17)的一端穿过安装架(3)并与第一摩擦块(14)相固定。
6.根据权利要求5所述的一种轨道物流机器人的减震机构,其特征在于:多个所述电动推杆(17)的多侧均固定连接有固定块(18),且固定块(18)与安装架(3)相固定。
7.根据权利要求1所述的一种轨道物流机器人的减震机构,其特征在于:多个所述轨道轮(4)的圆周外壁均固定连接有橡胶环(19)。
8.根据权利要求7所述的一种轨道物流机器人的减震机构,其特征在于:多个所述安装架(3)的顶部均固定连接有环型架(13),环型架(13)的一侧转动连接有多个辅助辊(15),且辅助辊(15)与橡胶环(19)相接触。
技术总结
本技术涉及物流机器人技术领域,且公开了一种轨道物流机器人的减震机构,包括机器人本体,所述机器人本体的底部开设有多个安装槽,安装槽内滑动连接有安装架,安装架的内部转动连接有轨道轮,多个所述安装架的一侧均固定连接有电机,且电机输出轴的一端穿过安装架并与轨道轮相固定。本技术通过物流机器人在进行轨道切换时,轨道轮带动安装架相对于机器人本体作向上运动,此时,弹簧缓冲器受力压缩并通过其本身的性能对机器人本体进行初步减震,同时,通过缓冲机构使安装架向上移动的动能通过摩擦力转换为热能并得到减少,从而使机器人本体得到进一步的减震,提高了装置的减震效果。
技术研发人员:张逸文,张燕
受保护的技术使用者:迈步医疗科技(江苏)有限公司
技术研发日:20230731
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!