一种轨道物流机器人的制作方法
本技术涉及机器人,更具体地涉及一种轨道物流机器人。
背景技术:
1、机器人的种类繁多,其中就有轨道物流机器人,部分轨道物流机器人已经应用在医院的手术室中。
2、经检索,公告号为cn208963927u的中国专利文件,公开了洁净手术室虚拟轨道物流机器人,智能化配送更快速、准确,改变了目前手术室的人工配送以及耗材管理模式,解决人工配送存在医疗事故隐患的问题,然而仍存在以下缺陷,当机器人使用在复杂轨道上时,容易出现脱轨的现象,由于物流机器人较重,不便于对脱轨后的机器人进行复位。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种轨道物流机器人,以解决上述背景技术中存在的问题。
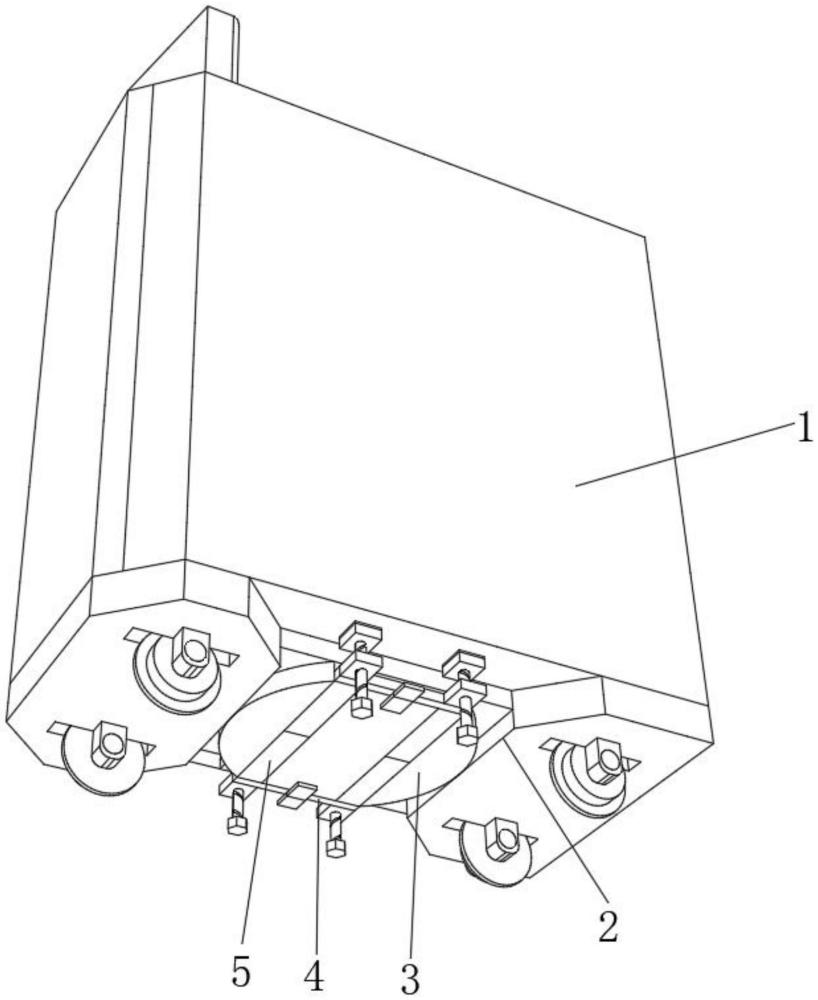
2、本实用新型提供如下技术方案:一种轨道物流机器人,包括机器人本体,机器人本体的底部设有多个轨道轮,所述机器人本体的底部开设有安装槽,安装槽内转动连接有转盘,所述机器人本体的底部设有对转盘进行固定的限位部件,所述转盘的底部开设有两个放置槽,两个放置槽内分别固定连接有两个伸缩杆,相邻的两个伸缩杆的一端均固定连接有连接杆,连接杆的一侧转动连接有两个转动块,转动块的内部螺纹连接有螺纹杆,螺纹杆的一端转动连接有撑板,所述连接杆的一侧设有对转动块进行固定的定位部件,所述转盘的底部设有两个对连接杆进行固定的锁紧部件。
3、进一步的,所述限位部件包括两个滑孔,滑孔开设在机器人本体的底部,两个所述滑孔的顶部内壁均固定连接有第一弹簧,第一弹簧的底端固定连接有滚珠,所述转盘的顶部开设有多个弧型凹槽,且弧型凹槽与滚珠相卡接。
4、进一步的,所述定位部件包括多个转动板,多个转动板分别转动连接在两个连接杆的顶部,所述转动板与转动块相接触。
5、进一步的,多个所述撑板的顶部均固定连接有橡胶垫。
6、进一步的,所述锁紧部件包括两个弹性卡架,两个弹性卡架分别固定连接在转盘的底部,两个所述连接杆的底部均开设有卡槽。
7、进一步的,两个所述弹性卡架的一端均固定连接有辅助板,辅助板的上表面开设有多个防滑纹。
8、进一步的,所述转盘的两侧均开设有避位孔,避位孔的一侧内壁均固定连接有第二弹簧,且第二弹簧的一端与连接杆相接触。
9、本实用新型的技术效果和优点:
10、1.本实用新型通过转盘和伸缩杆的配合使用,通过锁紧部件解除连接杆的固定状态,然后向下转动螺纹杆,使螺纹杆带动撑板向下移动,然后向外拉动连接杆使连接杆带动伸缩杆向外伸长至合适距离,然后解除定位部件并翻转转动块并转动螺纹杆,使机器人本体得到撑起,然后转动机器人本体,使机器人本体围绕转盘转动至其轨道轮的方向与轨道一致,并通过限位部件得到固定,然后通过伸缩杆,左右推动调整机器人本体的左右位置,使其轨道轮处于轨道的正上方,然后反向转动螺纹杆,使机器人本体得到降落,并使其轨道轮精准的落在轨道上,从而使其得到便捷复位,避免现有的机器人使用在复杂轨道上时,容易出现脱轨的现象,由于物流机器人较重,不便于对脱轨后的机器人进行复位,提高了机器人的便捷性。
11、2.本实用新型通过设有限位部件,通过第一弹簧使滚珠卡在弧型凹槽内,当转动机器人本体时,滚珠通过弧型凹槽受力向上移动并使第一弹簧受力缩短并产生弹力,直至机器人本体转动至下一个弧型凹槽时,第一弹簧回弹复位带动滚珠向下移动复位并重新与下一个弧型凹槽相卡接,如此往复循环,直至机器人本体转动至合适位置,提高了机器人的调节效果。
12、3.本实用新型通过设有锁紧部件,向下按压弹性卡架,弹性卡架受力弯曲变形并与卡槽脱离卡合,从而使连接杆脱离锁紧状态,进而便于工作人员进行后续操作,提高了机器人的锁紧效果。
技术特征:
1.一种轨道物流机器人,包括机器人本体(1),机器人本体(1)的底部设有多个轨道轮,其特征在于:所述机器人本体(1)的底部开设有安装槽(2),安装槽(2)内转动连接有转盘(3),所述机器人本体(1)的底部设有对转盘(3)进行固定的限位部件,所述转盘(3)的底部开设有两个放置槽(12),两个放置槽(12)内分别固定连接有两个伸缩杆(5),相邻的两个伸缩杆(5)的一端均固定连接有连接杆(4),连接杆(4)的一侧转动连接有两个转动块(11),转动块(11)的内部螺纹连接有螺纹杆(16),螺纹杆(16)的一端转动连接有撑板(17),所述连接杆(4)的一侧设有对转动块(11)进行固定的定位部件,所述转盘(3)的底部设有两个对连接杆(4)进行固定的锁紧部件。
2.根据权利要求1所述的一种轨道物流机器人,其特征在于:所述限位部件包括两个滑孔(6),滑孔(6)开设在机器人本体(1)的底部,两个所述滑孔(6)的顶部内壁均固定连接有第一弹簧(7),第一弹簧(7)的底端固定连接有滚珠(8),所述转盘(3)的顶部开设有多个弧型凹槽(9),且弧型凹槽(9)与滚珠(8)相卡接。
3.根据权利要求1所述的一种轨道物流机器人,其特征在于:所述定位部件包括多个转动板(10),多个转动板(10)分别转动连接在两个连接杆(4)的顶部,所述转动板(10)与转动块(11)相接触。
4.根据权利要求3所述的一种轨道物流机器人,其特征在于:多个所述撑板(17)的顶部均固定连接有橡胶垫(18)。
5.根据权利要求1所述的一种轨道物流机器人,其特征在于:所述锁紧部件包括两个弹性卡架(13),两个弹性卡架(13)分别固定连接在转盘(3)的底部,两个所述连接杆(4)的底部均开设有卡槽(14)。
6.根据权利要求5所述的一种轨道物流机器人,其特征在于:两个所述弹性卡架(13)的一端均固定连接有辅助板(15),辅助板(15)的上表面开设有多个防滑纹。
7.根据权利要求6所述的一种轨道物流机器人,其特征在于:所述转盘(3)的两侧均开设有避位孔(20),避位孔(20)的一侧内壁均固定连接有第二弹簧(19),且第二弹簧(19)的一端与连接杆(4)相接触。
技术总结
本技术涉及机器人技术领域,且公开了一种轨道物流机器人,包括机器人本体,机器人本体的底部设有多个轨道轮,所述机器人本体的底部开设有安装槽,安装槽内转动连接有转盘,所述机器人本体的底部设有对转盘进行固定的限位部件,所述转盘的底部开设有两个放置槽。本技术能够通过撑板和螺纹杆使机器人本体得到撑起,然后机器人本体围绕转盘转动至其轨道轮的方向与轨道一致,并通过限位部件得到固定,然后通过伸缩杆,左右推动调整机器人本体的左右位置,使其轨道轮处于轨道的正上方,然后反向转动螺纹杆,使机器人本体得到降落,并使其轨道轮精准的落在轨道上,从而使其得到便捷复位,提高了机器人的便捷性。
技术研发人员:张逸文,张燕
受保护的技术使用者:迈步医疗科技(江苏)有限公司
技术研发日:20230731
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!