一种机器人移载设备的制作方法
本技术涉及移载设备,具体涉及一种机器人移载设备。
背景技术:
1、移载设备是一种常用于产线产品移动的机械装置,可以用于搬运或转移产品,目前常见的移载设备利用皮带或者传送辊持续性地进行传送,这些设备虽然可以进行高速的移载工作,但是,其只能进行直线移载工作,当需要进行非直线移载工作时,则需要设置多个移载设备进行转向,非常繁琐。
技术实现思路
1、鉴于上述现有移载设备存在的问题,提出了本实用新型。
2、因此,本实用新型目的是提供一种机器人移载设备,解决了现有技术中移载设备只能进行直线移载工作,当需要进行非直线移载工作时,则需要设置多个移载设备进行转向,非常繁琐的问题。
3、为了实现上述目的,本实用新型提供如下技术方案:
4、一种机器人移载设备,包括龙门架,所述龙门架的上侧设置滑轨,所述滑轨的上表面滑动设置有伺服平移机构,所述伺服平移机构的一侧设置有举升液压缸,所述举升液压缸的活塞杆末端固定设置有移载机械臂,所述滑轨的上表面且位于远离移载机械臂的一端设置有倒挂机器人,所述倒挂机器人的下端设置有视觉相机,所述龙门架的一侧固定设置有配电箱;
5、所述龙门架的下侧设置有多个预埋板,多个所述预埋板的上表面均相抵设置有安装板,多个所述安装板均与龙门架主体的下端固定连接;
6、多个所述预埋板与安装板之间均设置有连接机构。
7、优选的,所述连接机构包括定位柱和挡杆,所述安装板的表面开设有定位孔,多个所述定位柱均活动套设与对应的定位孔的内部,多个所述定位柱的下端均与预埋板固定连接,多个所述定位柱的内部开设有空腔,所述空腔的内部滑动设置有挡板,所述挡杆固定设置于挡板的一侧,所述挡杆的一端延伸至空腔的外侧并与安装板的上表面相抵触。
8、优选的,所述空腔的内部固定设置有滑杆,所述挡板的一端与滑杆活动套接,所述滑杆的杆壁活动套接有弹簧,所述弹簧的量分别对应的挡板远离挡杆的一侧和空腔的内壁固定连接。
9、优选的,所述龙门架的一侧固定设置有扶梯。
10、优选的,所述扶梯的上端一侧固定设置有防护栏。
11、优选的,所述龙门架的中端下侧固定设置有支撑柱。
12、在上述技术方案中,本实用新型提供的技术效果和优点:
13、1、本实用新型,通过伺服平移机构的设置,能够将移载机械臂移动至指定地点,举升液压缸的设置,能调节移载机械臂的高度,视觉相机的设置,能够提高移载机械臂抓取的精准度,即能够实现高效自动化移载工作。
14、2、本实用新型,通过将挡杆推入空腔的内部,即解除对定位柱的限位,即能够将安装板与预埋板进行分离,即方便对设备进行拆卸维护维修。
技术特征:
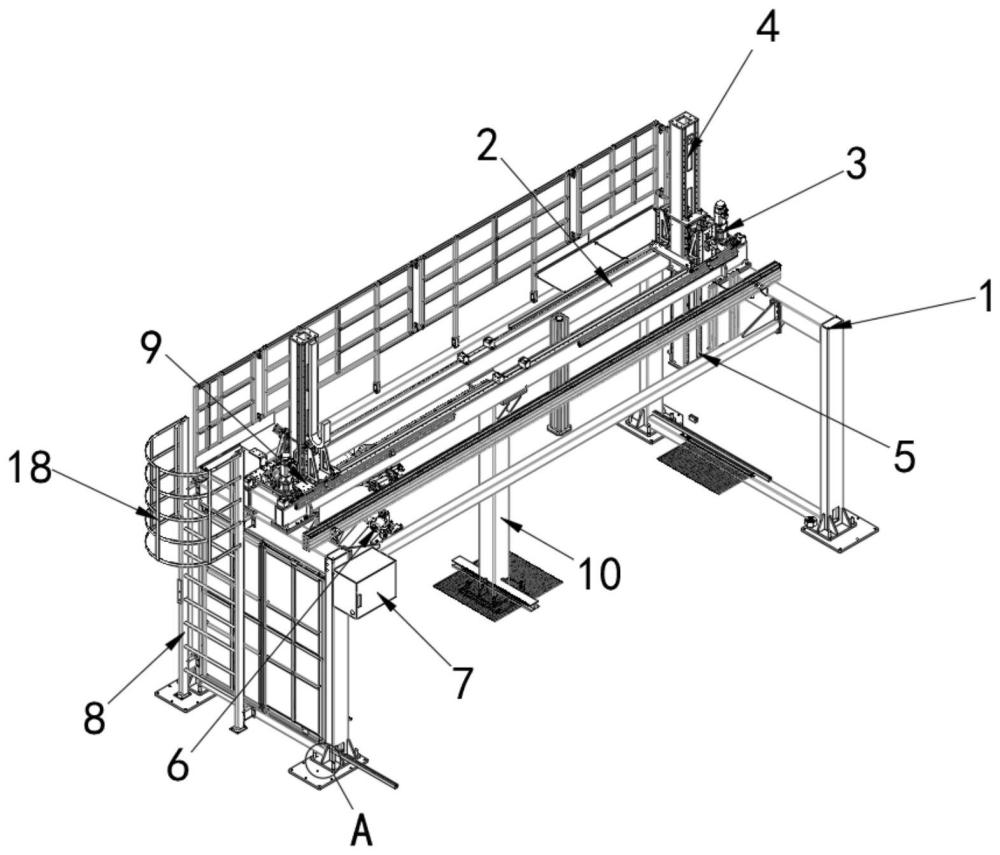
1.一种机器人移载设备,包括龙门架(1),其特征在于,所述龙门架(1)的上侧设置滑轨(2),所述滑轨(2)的上表面滑动设置有伺服平移机构(3),所述伺服平移机构(3)的一侧设置有举升液压缸(4),所述举升液压缸(4)的活塞杆末端固定设置有移载机械臂(5),所述滑轨(2)的上表面且位于远离移载机械臂(5)的一端设置有倒挂机器人(9),所述倒挂机器人(9)的下端设置有视觉相机(6),所述龙门架(1)的一侧固定设置有配电箱(7);
2.根据权利要求1所述的机器人移载设备,其特征在于,所述连接机构包括定位柱(13)和挡杆(14),所述安装板(11)的表面开设有定位孔,多个所述定位柱(13)均活动套设与对应的定位孔的内部,多个所述定位柱(13)的下端均与预埋板(12)固定连接,多个所述定位柱(13)的内部开设有空腔,所述空腔的内部滑动设置有挡板(15),所述挡杆(14)固定设置于挡板(15)的一侧,所述挡杆(14)的一端延伸至空腔的外侧并与安装板(11)的上表面相抵触。
3.根据权利要求2所述的机器人移载设备,其特征在于,所述空腔的内部固定设置有滑杆(16),所述挡板(15)的一端与滑杆(16)活动套接,所述滑杆(16)的杆壁活动套接有弹簧(17),所述弹簧(17)的量分别对应的挡板(15)远离挡杆(14)的一侧和空腔的内壁固定连接。
4.根据权利要求1所述的机器人移载设备,其特征在于,所述龙门架(1)的一侧固定设置有扶梯(8)。
5.根据权利要求4所述的机器人移载设备,其特征在于,所述扶梯(8)的上端一侧固定设置有防护栏(18)。
6.根据权利要求1所述的机器人移载设备,其特征在于,所述龙门架(1)的中端下侧固定设置有支撑柱(10)。
技术总结
本技术公开了一种机器人移载设备,涉及移载设备技术领域,包括龙门架,所述龙门架的上侧设置滑轨,所述滑轨的上表面滑动设置有伺服平移机构,所述伺服平移机构的一侧设置有举升液压缸,所述举升液压缸的活塞杆末端固定设置有移载机械臂,所述滑轨的上表面且位于远离移载机械臂的一端设置有倒挂机器人,所述倒挂机器人的下端设置有视觉相机,所述龙门架的一侧固定设置有配电箱;所述龙门架的下侧设置有多个预埋板,多个所述预埋板的上表面均相抵设置有安装板,多个所述安装板均与龙门架主体的下端固定连接;多个所述预埋板与安装板之间均设置有连接机构。本技术能够进行高效自动化移载工作,且方便对装置进行维修拆装。
技术研发人员:陈海月
受保护的技术使用者:苏州战旗自动化有限公司
技术研发日:20230801
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!