一种重力滑动机构的制作方法
本技术涉及机械加工相关,尤其涉及一种重力滑动机构,具体涉及一种无动力重力滑动机构。
背景技术:
1、板状的工件在加工过程中需要进行传输处理,通常需要用到传送带类型的传输结构。
2、经过海量检索,发现现有技术公开号为cn206969654u,公开了一种搬运板自动输送装置,包括:一输送有搬运板的第一输送线、一与所述第一输送线相邻的第二输送线和一安装在所述第二输送线上的承接单元;其中,所述第一输送线的输送方向与所述第二输送线的输送方向相垂直,所述第二输送线上设置有若干第二辊轴,所述第二辊轴之间存在间隙,所述承接单元包括一设置在所述第二输送线下方的底架、竖直安装在所述底架上的第一气缸、安装在所述第一气缸活塞杆上且与所述第二输送线上的间隙相对应的一对第一输送链模块、安装在所述第一输送链模块上用于驱动所述第一输送链模块运动的一驱动模块。本实用新型能够实现搬运板的自动转向输送,有效的提高了搬运板输送的工作效率。
3、综上所述,现有的线体大多是利用驱动电机控制整条线体的移动,使得工作环境十分受限,既要满足能够搬运电机的人力物力,又要能够保障电机驱动的足够能源,且当该区域完成任务需要进行位置更改时,拆线搬运任务也十分困难,造成大量额外搬运的费用。
4、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种重力滑动机构,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本实用新型的目的是提供一种重力滑动机构。
2、为实现上述目的,本实用新型采用如下技术方案:
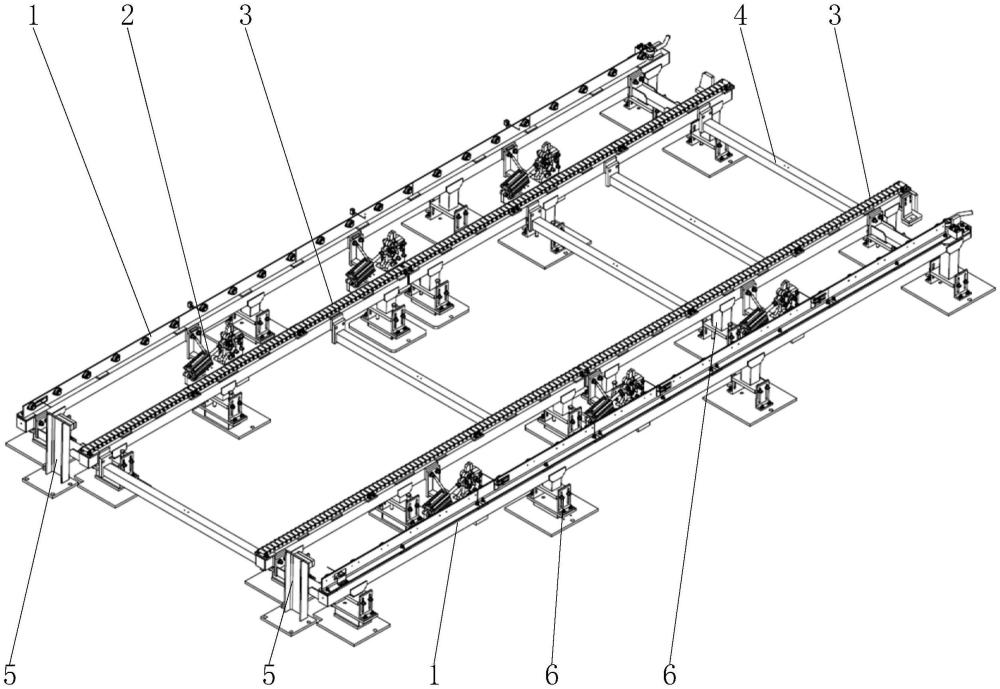
3、一种重力滑动机构,包括两个沿着y轴方向并列设置的输送架,且两个输送架之间沿着x轴方向通过若干个输送架连接杆连接在一起,输送架上沿着x轴方向均匀的安装有若干个流利条;
4、输送架朝向x轴正方向的一侧向下倾斜设置,输送架的外侧连接设置有导向架,导向架与内侧的输送架平行设置,导向架上朝向内侧的输送架的一侧沿着x轴方向均匀的安装有若干个导向滑轮,输送架的底部沿着x轴方向安装有若干个抬升地脚;
5、抬升地脚包括底座,输送架的底部沿着x轴方向均匀的设置有若干个支架,支架底部的支架底板位于底座的正上方,底座上沿着y轴方向的两侧均安装有l型紧固板,l型紧固板底部的一侧通过至少一个第三锁固螺栓锁固在底座上,l型紧固板顶部的一侧设置有至少一个沿着z轴方向分布的腰型孔,第二锁固螺栓穿过腰型孔后与内侧的支架底板锁固在一起,支架底板和下方的底座之间通过至少一个第一锁固螺栓锁固在一起。
6、作为本实用新型的进一步改进,导向架和输送架之间沿着x轴方向均匀的设置有若干个顶升机构,顶升机构包括顶升气缸和顶升挡块,顶升气缸通过顶升连接架安装在导向架和输送架之间,顶升气缸的驱动端通过多轴机械臂驱动顶升挡块上下移动。
7、作为本实用新型的进一步改进,导向架和输送架之间沿着x轴正方向的一侧设置有限位机构,限位机构包括限位架和挡块,限位架通过限位架连接杆安装在导向架和输送架之间,限位架朝向x轴负方向一的顶部安装有挡块。
8、作为本实用新型的进一步改进,挡块为橡胶块结构设置。
9、作为本实用新型的进一步改进,导向架上朝向内侧的输送架的一侧沿着x轴方向均匀的安装有若干个传感器。
10、作为本实用新型的进一步改进,传感器位于顶升机构的外侧。
11、借由上述方案,本实用新型至少具有以下优点:
12、本实用新型不需要使用额外的传动装置以及电力资源,只需要通过搬运工件自身的重力,再通过调节线体的坡度即可完成工件的搬运。
13、本实用新型可降低搬运成本,结构简单,搬运方便,无需任何驱动能源,可满足多种场景的搬运要求。
14、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种重力滑动机构,包括两个沿着y轴方向并列设置的输送架(3),且两个所述输送架(3)之间沿着x轴方向通过若干个输送架连接杆(4)连接在一起,所述输送架(3)上沿着x轴方向均匀的安装有若干个流利条;
2.如权利要求1所述的一种重力滑动机构,其特征在于,所述导向架(1)和输送架(3)之间沿着x轴方向均匀的设置有若干个顶升机构(2),所述顶升机构(2)包括顶升气缸(10)和顶升挡块(12),所述顶升气缸(10)通过顶升连接架(11)安装在导向架(1)和输送架(3)之间,所述顶升气缸(10)的驱动端通过多轴机械臂(13)驱动顶升挡块(12)上下移动。
3.如权利要求1所述的一种重力滑动机构,其特征在于,所述导向架(1)和输送架(3)之间沿着x轴正方向的一侧设置有限位机构(5),所述限位机构(5)包括限位架(14)和挡块(16),所述限位架(14)通过限位架连接杆(15)安装在导向架(1)和输送架(3)之间,所述限位架(14)朝向x轴负方向一的顶部安装有挡块(16)。
4.如权利要求3所述的一种重力滑动机构,其特征在于,所述挡块(16)为橡胶块结构设置。
5.如权利要求1所述的一种重力滑动机构,其特征在于,所述导向架(1)上朝向内侧的输送架(3)的一侧沿着x轴方向均匀的安装有若干个传感器(9)。
技术总结
本技术涉及一种重力滑动机构,包括两个沿着Y轴方向并列设置的输送架,且两个输送架之间沿着X轴方向通过若干个输送架连接杆连接在一起,输送架上沿着X轴方向均匀的安装有若干个流利条;输送架朝向X轴正方向的一侧向下倾斜设置,输送架的外侧连接设置有导向架,输送架的底部沿着X轴方向安装有若干个抬升地脚。本技术不需要使用额外的传动装置以及电力资源,只需要通过搬运工件自身的重力,再通过调节线体的坡度即可完成工件的搬运。
技术研发人员:陆文灿,徐潇晨,顾曙芬,陆文懿
受保护的技术使用者:苏州丹景智能科技有限公司
技术研发日:20230802
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!