一种多工位自动化龙门桁架搬运设备的制作方法
本技术涉及黑水虻自动化养殖的,具体涉及一种多工位自动化龙门桁架搬运设备。
背景技术:
1、目前腐生性昆虫(黑水虻等)养殖行业普遍采用的盒式养殖方式,养殖盒需要经常搬运到其他工位进行后续工序操作。由于随着养殖规模逐渐扩大,养殖盒也做得更大更重,目前依靠吊运设备单个搬运养殖盒已经不能满足目前腐生性昆虫养殖高效率、高自动化程度要求。
技术实现思路
1、本实用新型的目的在于提供一种多工位自动化龙门桁架搬运设备,以解决现有技术中导致的上述缺陷。
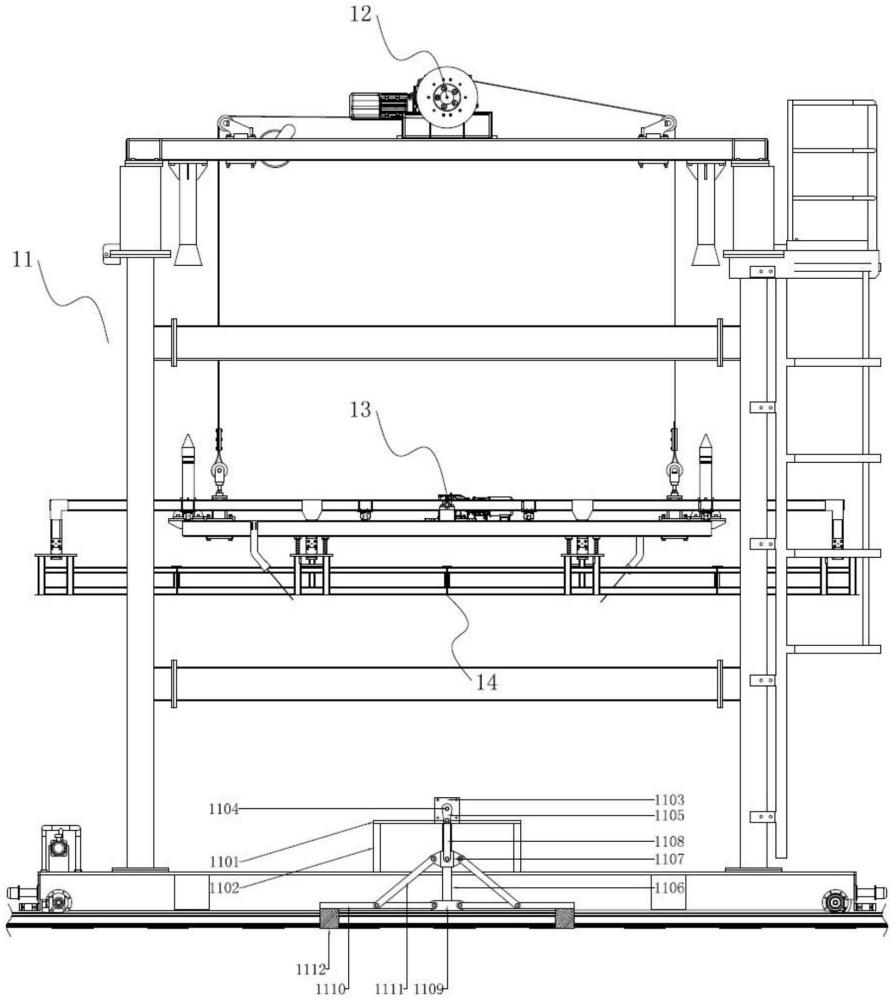
2、一种多工位自动化龙门桁架搬运设备,包括龙门桁架、提升机构及吊具机构,其中,所述提升机构设有若干个并均匀分布于龙门桁架的顶部,所述吊具机构设有若干个并对应连接于各个提升机构的下方,所述吊具机构用于实现吊取或释放养殖框,所述提升机构用于实现调整吊具机构及其上养殖框的高度,所述龙门桁架辅以提升机构及吊具机构沿着地面上铺设的轨道实现搬运或堆垛养殖框;
3、所述龙门桁架的底部通过一对支撑管水平安装有支撑板,所述支撑板的上侧通过电机座水平安装有驱动电机,并在驱动电机的输出端键连接有曲柄,所述支撑板的下侧竖直安装有滑动管,并在滑动管上滑动连接有滑动套,所述滑动套的侧面铰接有连杆,并将连杆与曲柄进行铰接,所述滑动管的底端焊接有固定管,并在固定管的左右两端对称铰接有一对摆杆,所述滑动套的左右两侧对称铰接有一对铰接条,位于同侧的铰接条与摆杆进行铰接,所述摆杆的下侧连接有橡胶制的摩擦块。
4、优选的,所述提升机构包括固定框一、电动机一及缠绕盘,所述固定框一水平安装于龙门桁架的顶部,所述电动机一为双头电机并通过固定板一安装于固定框一的中部,所述缠绕盘设有一对并对称安装于电动机一的两侧的输出轴上,所述缠绕盘上中心对称连接有两根钢丝带,所述固定框一的前后两边对称安装有两对滑轮一,所述钢丝带对应搭接于相邻的滑轮一上,所述钢丝带的下端连接有滑轮二,并在滑轮二的下侧均连接有连接框。
5、优选的,所述吊具机构包括固定框二、电动机二及螺纹杆,所述固定框二水平连接于前后两对连接框的底部,所述电动机二为双头电机并通过固定板二安装于固定框二的中部,所述螺纹杆设有一对并对称连接于电动机二的两侧的输出轴上,所述螺纹杆上均螺纹连接有移动管,所述固定框二的左右两边对称安装有两排直导轨,所述移动管对应滑动连接于相邻的直导轨上,所述移动管的下侧间隔连接有若干个连接管,所述连接管的下部竖直安装有夹紧板,所述夹紧板的底部水平安装有托举板。
6、优选的,所述固定框一的下侧前后对称连接有一对定位管,所述固定框二的上侧前后对称连接有一对定位杆,位于同侧的定位管同轴设于定位杆的正上方。
7、优选的,所述夹紧板与托举板构成l型的吊取结构,所述吊取结构与养殖框的接触面上均安装有摩擦垫。
8、优选的,所述固定框二上前后对角分布有一对位置检测组件,所述位置检测组件包括水平安装于固定框二上的一对固定条,所述固定条的外侧端滑动连接有连接杆,两个连接杆的下端部共同连接有接触条,所述连接杆在固定条与接触条之间套装有压缩弹簧,两个连接杆的上端部共同连接有连接条,所述连接条的中间水平连接有挡光条,两个固定条之间竖直连接有传感器架,所述传感器架的上部及下部分别连接有一个光电开关。
9、与现有技术相比,本实用新型具有以下优点:
10、本实用新型结合了龙门桁架高承载、自动夹具高灵活度特点,设置多个搬运工位可一次性搬运多个养殖盒,满足全自动化、高效率搬运。具体的,多工位自动化龙门桁架搬运设备具有4个抓取工位,可一次性搬运4件养殖盒,显著提高了对饲养黑水虻的养殖框的搬运效率。由于4台提升机的电机单独控制,本设备也可采用4个搬运工位中任意工位搬运,具有较高的灵活度。
技术特征:
1.一种多工位自动化龙门桁架搬运设备,其特征在于:包括龙门桁架(11)、提升机构(12)及吊具机构(13),其中,所述提升机构(12)设有若干个并均匀分布于龙门桁架(11)的顶部,所述吊具机构(13)设有若干个并对应连接于各个提升机构(12)的下方,所述吊具机构(13)用于实现吊取或释放养殖框(14),所述提升机构(12)用于实现调整吊具机构(13)及其上养殖框(14)的高度,所述龙门桁架(11)辅以提升机构(12)及吊具机构(13)沿着地面上铺设的轨道实现搬运或堆垛养殖框(14);
2.根据权利要求1所述的一种多工位自动化龙门桁架搬运设备,其特征在于:所述提升机构(12)包括固定框一(1201)、电动机一(1203)及缠绕盘(1204),所述固定框一(1201)水平安装于龙门桁架(11)的顶部,所述电动机一(1203)为双头电机并通过固定板一(1202)安装于固定框一(1201)的中部,所述缠绕盘(1204)设有一对并对称安装于电动机一(1203)的两侧的输出轴上,所述缠绕盘(1204)上中心对称连接有两根钢丝带(1205),所述固定框一(1201)的前后两边对称安装有两对滑轮一(1206),所述钢丝带(1205)对应搭接于相邻的滑轮一(1206)上,所述钢丝带(1205)的下端连接有滑轮二(1207),并在滑轮二(1207)的下侧均连接有连接框(1208)。
3.根据权利要求2所述的一种多工位自动化龙门桁架搬运设备,其特征在于:所述吊具机构(13)包括固定框二(1301)、电动机二(1303)及螺纹杆(1304),所述固定框二(1301)水平连接于前后两对连接框(1208)的底部,所述电动机二(1303)为双头电机并通过固定板二(1302)安装于固定框二(1301)的中部,所述螺纹杆(1304)设有一对并对称连接于电动机二(1303)的两侧的输出轴上,所述螺纹杆(1304)上均螺纹连接有移动管(1305),所述固定框二(1301)的左右两边对称安装有两排直导轨(1306),所述移动管(1305)对应滑动连接于相邻的直导轨(1306)上,所述移动管(1305)的下侧间隔连接有若干个连接管(1307),所述连接管(1307)的下部竖直安装有夹紧板(1308),所述夹紧板(1308)的底部水平安装有托举板(1309)。
4.根据权利要求3所述的一种多工位自动化龙门桁架搬运设备,其特征在于:所述固定框一(1201)的下侧前后对称连接有一对定位管(1209),所述固定框二(1301)的上侧前后对称连接有一对定位杆(1311),位于同侧的定位管(1209)同轴设于定位杆(1311)的正上方。
5.根据权利要求3所述的一种多工位自动化龙门桁架搬运设备,其特征在于:所述夹紧板(1308)与托举板(1309)构成l型的吊取结构,所述吊取结构与养殖框(14)的接触面上均安装有摩擦垫(1310)。
6.根据权利要求3所述的一种多工位自动化龙门桁架搬运设备,其特征在于:所述固定框二(1301)上前后对角分布有一对位置检测组件(1312),所述位置检测组件(1312)包括水平安装于固定框二(1301)上的一对固定条(13121),所述固定条(13121)的外侧端滑动连接有连接杆(13122),两个连接杆(13122)的下端部共同连接有接触条(13123),所述连接杆(13122)在固定条(13121)与接触条(13123)之间套装有压缩弹簧(13124),两个连接杆(13122)的上端部共同连接有连接条(13125),所述连接条(13125)的中间水平连接有挡光条(13126),两个固定条(13121)之间竖直连接有传感器架(13127),所述传感器架(13127)的上部及下部分别连接有一个光电开关(13128)。
技术总结
本技术公开了一种多工位自动化龙门桁架搬运设备,涉及黑水虻自动化养殖的技术领域,包括龙门桁架、提升机构及吊具机构,其中,龙门桁架的底部对称设有一对摩擦块,并通过驱动电机带动两边的摩擦块下降,摩擦块可帮助龙门桁架进行刹车制动,提升机构设有若干个并均匀分布于龙门桁架的顶部,吊具机构设有若干个并对应连接于各个提升机构的下方,吊具机构用于实现吊取或释放养殖框,提升机构用于实现调整吊具机构及其上养殖框的高度,龙门桁架辅以提升机构及吊具机构沿着地面上铺设的轨道实现搬运或堆垛养殖框。本申请中的多工位自动化龙门桁架搬运设备具有4个抓取工位,可一次性搬运4件养殖盒,显著提高了对饲养黑水虻的养殖框的搬运效率。
技术研发人员:陈力军,朱虹,陈霁尧
受保护的技术使用者:芜湖海格力斯起重机械制造有限公司
技术研发日:20230817
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!