一种货叉结构的制作方法
本技术涉及货叉,具体为一种货叉结构。
背景技术:
1、货叉是搬运机构上部的重要部件之一,其用于对货物物品进行支撑搬运,广泛应用于仓储、港口码头,铁路、汽车制造、钢铁冶炼、化工和建筑等行业,根据搬运货物的类型与形状不同,货叉具有不同的形状规格。
2、在半导体行业中,光罩作为光蚀刻技术中重要的生产工具,在生产中需要将光罩从储存盒中转移到上机盒中,生产后经过清洗再转移回储存盒中,这一过程中需要通过货叉对光罩、储存盒、上机盒依次进行搬运移动,因为光罩、储存盒、上机盒在尺寸、结构上差异较大,完搬运移动工作需要使用多个机器人交互配合,或者同一机器人自动更换不同规格的货叉才能实现光罩、储存盒与上机盒的搬运移动作业,无论那一种方法,都存在增加设备成本、占用厂区面积和加工效率低下的缺点。
技术实现思路
1、本实用新型的目的在于提供一种货叉结构,以解决上述背景技术中提出的问题。
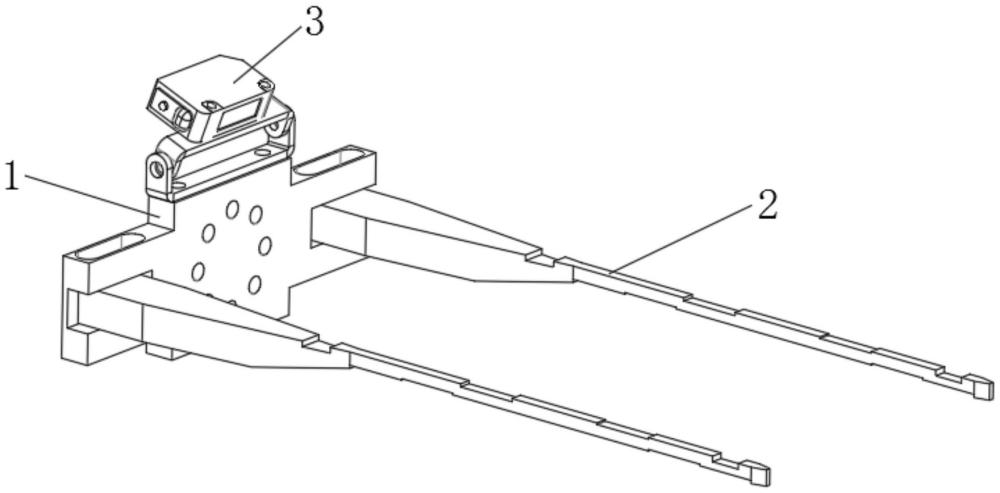
2、为实现上述目的,本实用新型提供如下技术方案:一种货叉结构,包括用于搬运储存盒、上机盒和光罩的货叉结构,所述货叉结构包括货叉安装座、货叉机构和传感机构;
3、所述货叉安装座设置在多轴机器人的上部,所述货叉安装座的前部两侧呈对称状开设有货叉连接槽,所述货叉机构设置于货叉连接槽的内侧,所述货叉机构包括货叉主体,所述货叉主体的正反两面分别开设有上槽口和下槽口,所述传感机构设置于货叉安装座的上部。
4、作为优选,上述货叉安装座的后侧开设有连接槽座,所述连接槽座的内部均匀开设有连接螺孔,所述连接螺孔的内侧设置有螺栓,所述货叉安装座通过螺栓固定于多轴机器人的上部,所述货叉主体的数量为两个,两个所述货叉主体呈对称状分布于货叉安装座的前侧,两个所述货叉主体均通过螺栓固定连接于货叉连接槽的内侧。
5、作为优选,上述储存盒的底部设置有第一限位块,所述第一限位块与上槽口相适配,所述储存盒放置于货叉主体的正面,所述第一限位块卡接于上槽口的内侧。
6、作为优选,上述上机盒的底部设置有第二限位块,所述第二限位块与上槽口相适配,所述上机盒放置于货叉主体的正面,所述第二限位块卡接于上槽口的内侧。
7、作为优选,上述光罩的底部设置有第三限位块,所述第三限位块与下槽口相适配,所述上机盒放置于货叉主体的反面,所述第三限位块卡接于下槽口的内侧。
8、作为优选,上述传感机构包括传感器固定板和感应传感器,所述货叉安装座的顶部固定有传感器连接座,所述传感器固定板铰接于传感器连接座的上部,所述感应传感器通过螺钉固定连接于传感器固定板的上部。
9、本实用新型采用以上技术方案与现有技术相比,具有以下技术效果:
10、本货叉结构对货叉采用翻转式的结构设置,并在货叉主体上下两侧开设有不同的限位槽口,利用货叉正反两面开设的限位槽口对应光罩、储存盒和上机盒上部的限位结构,可在搬运时分别对光罩、储存盒和上机盒进行稳定的支撑固定,配合多轴机器人可使货叉进行180°的旋转,实现货叉正面搬运储存盒,上机盒,货叉反面面搬运光罩,使用一个货叉即可实现对光罩、储存盒和上机盒的搬运,可以有效降低设备成本,缩小占地面积,提高生产加工效率。
技术特征:
1.一种货叉结构,包括用于搬运储存盒(13)、上机盒(14)和光罩(15)的货叉结构,其特征在于:所述货叉结构包括货叉安装座(1)、货叉机构(2)和传感机构(3);
2.根据权利要求1所述的一种货叉结构,其特征在于:所述货叉安装座(1)的后侧开设有连接槽座(4),所述连接槽座(4)的内部均匀开设有连接螺孔(5),所述连接螺孔(5)的内侧设置有螺栓,所述货叉安装座(1)通过螺栓固定于多轴机器人的上部,所述货叉主体(7)的数量为两个,两个所述货叉主体(7)呈对称状分布于货叉安装座(1)的前侧,两个所述货叉主体(7)均通过螺栓固定连接于货叉连接槽(6)的内侧。
3.根据权利要求2所述的一种货叉结构,其特征在于:所述储存盒(13)的底部设置有第一限位块,所述第一限位块与上槽口(8)相适配,所述储存盒(13)放置于货叉主体(7)的正面,所述第一限位块卡接于上槽口(8)的内侧。
4.根据权利要求2所述的一种货叉结构,其特征在于:所述上机盒(14)的底部设置有第二限位块,所述第二限位块与上槽口(8)相适配,所述上机盒(14)放置于货叉主体(7)的正面,所述第二限位块卡接于上槽口(8)的内侧。
5.根据权利要求2所述的一种货叉结构,其特征在于:所述光罩(15)的底部设置有第三限位块,所述第三限位块与下槽口(9)相适配,所述上机盒(14)放置于货叉主体(7)的反面,所述第三限位块卡接于下槽口(9)的内侧。
6.根据权利要求1所述的一种货叉结构,其特征在于:所述传感机构(3)包括传感器固定板(11)和感应传感器(12),所述货叉安装座(1)的顶部固定有传感器连接座(10),所述传感器固定板(11)铰接于传感器连接座(10)的上部,所述感应传感器(12)通过螺钉固定连接于传感器固定板(11)的上部。
技术总结
本技术涉及货叉技术领域,且公开了一种货叉结构,货叉安装座设置在多轴机器人的上部,货叉安装座的前部两侧呈对称状开设有货叉连接槽,货叉机构设置于货叉连接槽的内侧,货叉机构包括货叉主体,货叉主体的正反两面分别开设有上槽口和下槽口,传感机构设置于货叉安装座的上部,本货叉结构对货叉采用翻转式的结构设置,并在货叉主体上下两侧开设有不同的限位槽口,可在搬运时分别对光罩、储存盒和上机盒进行稳定的支撑固定,配合多轴机器人可使货叉进行180°的旋转,实现货叉正面搬运储存盒,上机盒,货叉反面面搬运光罩,使用一个货叉即可实现对光罩、储存盒和上机盒的搬运,可以有效降低设备成本,缩小占地面积,提高生产加工效率。
技术研发人员:史延锋,史延库,李锐华
受保护的技术使用者:苏州盟萤电子科技有限公司
技术研发日:20230822
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!