一种多层叉车机器人的制作方法
本申请涉及叉车,特别涉及一种多层叉车机器人。
背景技术:
1、叉车机器人作为智能仓储系统中的一种重要运输设备应用于仓储领域。在现有的密集型的仓储中,物料托盘数量密集,但无论是人工叉车还是自动搬运机器人,每次运输托盘的数量只能是一托,效率低下,满足不了日益增长的物流需求。同时,现有的叉车机器人的货叉在将货物抬升到最高点时,缺少限位容易导致货叉与车体顶部或其他机构发生碰撞而产生晃动,从而存在货物掉落的风险,稳定性差。
技术实现思路
1、为了解决上述技术问题之一,本申请提供一种多层叉车机器人,包括车体、以及可沿第一方向滑动设置于所述车体内的第一货叉机构和第二货叉机构,所述第二货叉机构位于所述第一货叉机构沿第二方向的上方,所述车体上设置有抬升机构和提升机构,所述抬升机构和提升机构分别驱动所述第一货叉机构和第二货叉机构沿第二方向移动。通过第一货叉机构和第二货叉机构沿第一方向滑动叉取托盘货物,再通过抬升机构和提升机构分别驱动第一货叉机构和第二货叉机构升降移动,以实现驱使托盘货物升降移动,通过双层设置的第一货叉机构和第二货叉机构可以同时叉取两托盘的托盘货物,进而到达提高运输效率的目的,满足日益增长的物流需求,在第二货叉机构沿第二方向的上端设置有用于缓冲所述第二货叉机构的防撞组件,在提升机构驱使第二货叉机构抬升货物时,通过防撞组件对第二货叉机构进行缓冲和限位,进而避免第二货叉机构与车体顶部或者提升机构的顶部发生碰撞,提高货物运输的安全性。
2、优选的,所述防撞组件包括防撞板,所述防撞板朝向所述第二货叉机构的表面设置有若干个缓冲块。进而第二货叉机构在抬升并抵接于缓冲块时,通过缓冲块对第二货叉机构起到缓冲和限位的作用。
3、优选的,所述第一货叉机构包括第一导轨、滑动设置于所述第一导轨的第一货叉、以及驱动所述第一货叉沿第一方向滑动的第一驱动组件,所述抬升机构的驱动端连接于所述第一导轨。通过第一驱动组件驱动第一货叉沿第一方向滑动,再通过抬升机构驱动第一货叉沿第二方向升降移动,进而实现对托盘货物进行存取。
4、优选的,所述第一驱动组件包括设置于所述第一导轨上的第一驱动器、以及连接于所述第一驱动器驱动端的第一丝杆,所述第一丝杆连接于所述第一货叉。示例性的,第一驱动器为电机,第一丝杆与第一货叉螺纹连接,通过第一驱动器驱动第一丝杆转动,使得第一货叉在第一导轨上往返移动。
5、优选的,所述第二货叉机构包括第二导轨、滑动设置于所述第二导轨的第二货叉、以及驱动所述第二货叉沿第一方向滑动的第二驱动组件,所述第二导轨连接于所述提升机构。通过提升机构驱动第二导轨和第二货叉沿第二方向移动,再通过第二驱动组件驱动第二货叉沿第一方向移动,从而实现存取托盘货物和运输托盘货物。
6、优选的,所述第二驱动组件设置于所述第二导轨上的第二驱动器、以及连接于所述第二驱动器驱动端的第二丝杆,所述第二丝杆连接于所述第二货叉。示例性的,第二驱动器可以是电机,第二丝杆与第二货叉螺纹连接,通过第二驱动器驱动第二丝杆转动,使得第二货叉在第二导轨上往返移动。
7、优选的,所述抬升机构包括设置于所述车体内的固定座、以及设置于所述固定座的第三驱动器,所述第三驱动器的驱动端连接于所述第一导轨。第三驱动器可以是气缸,通过第三驱动器驱动第一导轨沿第二方向升降移动,进入驱使第一货叉沿第二方向升降移动。
8、优选的,所述提升机构包括升降板、连接于所述升降板的伸缩件、以及驱动所述伸缩件沿第二方向伸缩的第四驱动器。伸缩件的伸缩端连接于升降板,通过第四驱动器驱使伸缩件沿第二方向伸缩,使得升降板沿第二方向移动,进而实现使得第二货叉抬升或下降。
9、优选的,在所述车体的相对两侧设置有配重支腿。进而提高第一货叉机构和第二货叉机构在运输及升降货物时的稳定性。
10、优选的,在所述车体两侧还设置有调节组件,所述调节组件用于调节所述配重支腿与所述车体之间的距离。在实际生产中,可以根据货物的大小来调整配重腿的距离,使运输及升降货物时更加稳定。
11、与现有技术相比,本申请的有益效果是:本申请通过在车体内可沿第一方向滑动设置有第一货叉机构和第二货叉机构,第二货叉机构位于第一货叉机构沿第二方向的上方。通过第一货叉机构和第二货叉机构沿第一方向滑动,进而使得第一货叉机构和第二货叉机构可以叉取托盘货物,再通过抬升机构和提升机构分别驱动第一货叉机构和第二货叉机构升降移动,以实现托盘货物升降移动,通过第一货叉机构和第二货叉机构可以同时叉取两托盘的托盘货物,进而到达提高运输效率的目的,满足日益增长的物流需求。同时在第二货叉机构沿第二方向的上端设置有防撞组件,在提升机构驱使第二货叉机构抬升货物到最高点时,通过防撞组件对第二货叉机构进行缓冲和限位,进而避免第二货叉机构因碰撞而产生晃动,提高货物运输的安全性和稳定性。
技术特征:
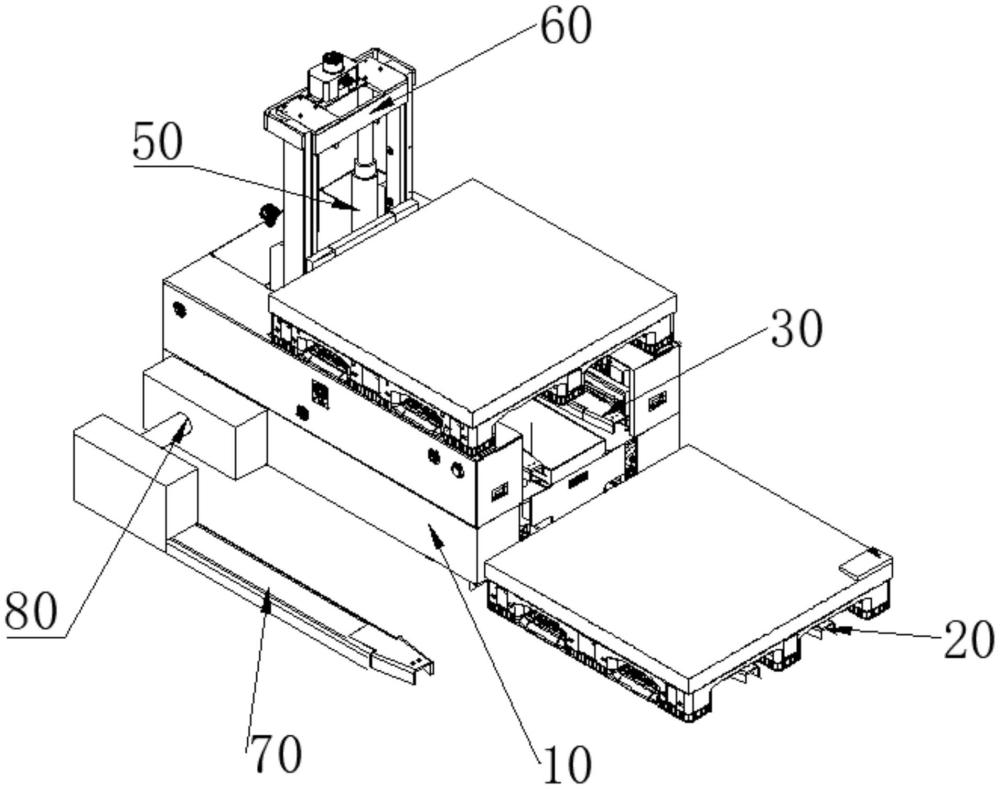
1.一种多层叉车机器人,其特征在于:包括车体(10)、以及可沿第一方向滑动设置于所述车体(10)内的第一货叉机构(20)和第二货叉机构(30),所述第二货叉机构(30)位于所述第一货叉机构(20)沿第二方向的上方,所述车体(10)上设置有抬升机构(40)和提升机构(50),所述抬升机构(40)和提升机构(50)分别驱动所述第一货叉机构(20)和第二货叉机构(30)沿第二方向移动,在所述第二货叉机构(30)沿第二方向的上端还设置有用于缓冲所述第二货叉机构(30)的防撞组件(60)。
2.根据权利要求1所述的多层叉车机器人,其特征在于:所述防撞组件(60)包括防撞板(61),所述防撞板(61)朝向所述第二货叉机构(30)的表面设置有若干个缓冲块(62)。
3.根据权利要求1所述的多层叉车机器人,其特征在于:所述第一货叉机构(20)包括第一导轨(21)、滑动设置于所述第一导轨(21)的第一货叉(22)、以及驱动所述第一货叉(22)沿第一方向滑动的第一驱动组件(23),所述抬升机构(40)的驱动端连接于所述第一导轨(21)。
4.根据权利要求3所述的多层叉车机器人,其特征在于:所述第一驱动组件(23)包括设置于所述第一导轨(21)上的第一驱动器(231)、以及连接于所述第一驱动器(231)驱动端的第一丝杆(232),所述第一丝杆(232)连接于所述第一货叉(22)。
5.根据权利要求1所述的多层叉车机器人,其特征在于:所述第二货叉机构(30)包括第二导轨(31)、滑动设置于所述第二导轨(31)的第二货叉(32)、以及驱动所述第二货叉(32)沿第一方向滑动的第二驱动组件(33),所述第二导轨(31)连接于所述提升机构(50)。
6.根据权利要求5所述的多层叉车机器人,其特征在于:所述第二驱动组件(33)设置于所述第二导轨(31)上的第二驱动器(331)、以及连接于所述第二驱动器(331)驱动端的第二丝杆(332),所述第二丝杆(332)连接于所述第二货叉(32)。
7.根据权利要求3所述的多层叉车机器人,其特征在于:所述抬升机构(40)包括设置于所述车体(10)内的固定座(41)、以及设置于所述固定座(41)的第三驱动器(42),所述第三驱动器(42)的驱动端连接于所述第一导轨(21)。
8.根据权利要求5所述的多层叉车机器人,其特征在于:所述提升机构(50)包括升降板(51)、连接于所述升降板(51)的伸缩件(53)、以及驱动所述伸缩件(53)沿第二方向伸缩的第四驱动器(52)。
9.根据权利要求1所述的多层叉车机器人,其特征在于:在所述车体(10)的相对两侧设置有配重支腿(70)。
10.根据权利要求9所述的多层叉车机器人,其特征在于:在所述车体(10)两侧还设置有调节组件(80),所述调节组件(80)用于调节所述配重支腿(70)与所述车体(10)之间的距离。
技术总结
本申请涉及叉车技术领域,特别涉及一种多层叉车机器人。包括车体、以及可沿第一方向滑动设置于所述车体内的第一货叉机构和第二货叉机构,所述第二货叉机构位于所述第一货叉机构沿第二方向的上方,所述车体上设置有抬升机构和提升机构,所述抬升机构和提升机构分别驱动所述第一货叉机构和第二货叉机构沿第二方向移动,在所述第二货叉机构沿第二方向的上端还设置有防撞组件。通过双层设置的第一货叉机构和第二货叉机构可以同时叉取两托盘的托盘货物,进而到达提高运输效率的目的,满足日益增长的物流需求,再通过防撞组件对第二货叉机构进行缓冲和限位,进而避免第二货叉机构因碰撞而产生晃动,提高货物运输的安全性和稳定性。
技术研发人员:请求不公布姓名,请求不公布姓名
受保护的技术使用者:广东舜储智能装备有限公司
技术研发日:20230831
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!