一种电缸驱动的工件翻转设备的制作方法
本技术涉及自动化产线,尤其是涉及一种电缸驱动的工件翻转设备。
背景技术:
1、目前一般工业迅速发展,制造线对于生产线的节拍和成本的要求也越来越高。
2、中国专利公告号cn210480143u提供了一种机械自动翻转上料机构,属于上料设备技术领域,包括支撑架和设置在支撑架上的传送组件、翻转组件和举升组件,传送组件包括第一伺服电机、转轴、传动轮、从动轮和传送带,传送带至少设置为两条,两条传送带平行设置,转轴通过第一伺服电机驱动传动轮转动,传动轮通过传送带带动从动轮转动,举升组件设置在两条传送带之间,举升组件包括顶板和第一气缸,第一气缸驱动顶板进行上下运动,翻转组件包括第二伺服电机、第二气缸和机械手,第二伺服电机驱动机械手进行180°转动,第二气缸驱动机械手向传送带方向进行前后移动。
3、上述申请提供的翻转结构较为简单,采用机械手固定工件的方案适用于板材等轻质材料,但是对于较重的工件,加载在机械手、翻转组件与支撑架连接处的力较大,机构的稳固性和工件安全难以得到保障。
4、综上,当前缺少一种面向质量较重的工件的翻转设备。
技术实现思路
1、本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种电缸驱动的工件翻转设备,以实现质量较重的工件的翻转。
2、本实用新型的目的可以通过以下技术方案来实现:
3、本实用新型提供了一种电缸驱动的工件翻转设备,包括:
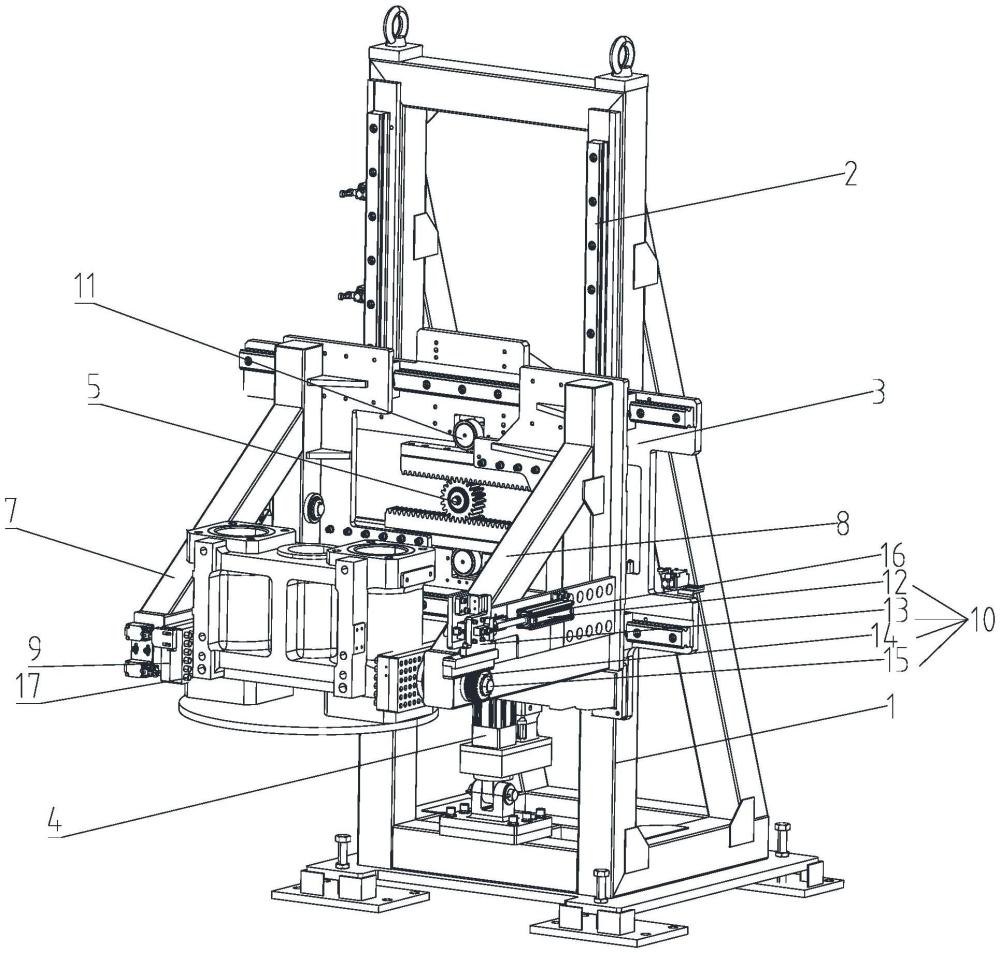
4、固定架,所述固定架在竖直方向上连接有第一滑轨;
5、滑动架,与所述第一滑轨连接,能够沿所述第一滑轨移动,所述滑动架通过电缸与所述固定架连接,所述滑动架上连接有驱动齿轮以及水平方向上的第二滑轨;
6、第一夹臂和第二夹臂,分别与所述第二滑轨连接,且分别与所述驱动齿轮啮合,所述第一夹臂和第二夹臂均连接有夹持块;
7、驱动模块,与所述夹持块连接,用于带动所述夹持块翻转。
8、作为优选的技术方案,针对所述的第一夹臂和第二夹臂中的任一个,均包括夹臂主体以及连接块,所述连接块的一侧与所述驱动齿轮啮合。
9、作为优选的技术方案,所述的滑动架上还设有限位滑轮,且所述限位滑轮与所述连接块的另一侧抵接。
10、作为优选的技术方案,所述的夹臂主体和所述连接块螺纹连接。
11、作为优选的技术方案,所述的驱动模块包括:
12、气缸,与所述第一夹臂或第二夹臂连接;
13、从动块,与所述气缸的伸缩端连接;
14、从动齿轮,与所述从动块啮合,所述从动齿轮通过轴与所述夹持块连接。
15、作为优选的技术方案,所述的第一夹臂或第二夹臂上连接有第三滑轨,所述从动块与所述第三滑轨连接。
16、作为优选的技术方案,所述的气缸与所述第一夹臂或第二夹臂螺纹连接。
17、作为优选的技术方案,所述的电缸与所述固定架铰接。
18、作为优选的技术方案,所述的夹持块的夹持面上连接有多个凸起。
19、作为优选的技术方案,所述的凸起为圆柱体。
20、与现有技术相比,本实用新型具有以下优点:
21、(1)可翻转工件的质量上限高:部分翻转设备采用气缸实现竖直方向的移动,由于气缸通常气动压力较低,能够产生的驱动力受限。本申请采用电缸作为工件竖直移动主要的动力,电缸通过将伺服电机的旋转运动转换成直线运动,实现精确的位置和推力控制,相比气缸,电缸可以支撑及带动的工件质量上限更大,应用场景更加广泛。
22、(2)翻转过程平稳:本申请采用气缸-从动块-从动齿轮-夹持块的间接驱动方式,结构简单,驱动过程平缓。
技术特征:
1.一种电缸驱动的工件翻转设备,其特征在于,包括:
2.根据权利要求1所述的一种电缸驱动的工件翻转设备,其特征在于,针对所述的第一夹臂(7)和第二夹臂(8)中的任一个,均包括夹臂主体以及连接块,所述连接块的一侧与所述驱动齿轮(5)啮合。
3.根据权利要求2所述的一种电缸驱动的工件翻转设备,其特征在于,所述的滑动架(3)上还设有限位滑轮(11),且所述限位滑轮(11)与所述连接块的另一侧抵接。
4.根据权利要求2所述的一种电缸驱动的工件翻转设备,其特征在于,所述的夹臂主体和所述连接块螺纹连接。
5.根据权利要求1所述的一种电缸驱动的工件翻转设备,其特征在于,所述的驱动模块(10)包括:
6.根据权利要求5所述的一种电缸驱动的工件翻转设备,其特征在于,所述的第一夹臂(7)或第二夹臂(8)上连接有第三滑轨(16),所述从动块(13)与所述第三滑轨(16)连接。
7.根据权利要求5所述的一种电缸驱动的工件翻转设备,其特征在于,所述的气缸(12)与所述第一夹臂(7)或第二夹臂(8)螺纹连接。
8.根据权利要求1所述的一种电缸驱动的工件翻转设备,其特征在于,所述的电缸(4)与所述固定架(1)铰接。
9.根据权利要求1所述的一种电缸驱动的工件翻转设备,其特征在于,所述的夹持块(9)的夹持面上连接有多个凸起(17)。
10.根据权利要求9所述的一种电缸驱动的工件翻转设备,其特征在于,所述的凸起(17)为圆柱体。
技术总结
本技术涉及一种电缸驱动的工件翻转设备,包括:固定架,所述固定架在竖直方向上连接有第一滑轨;滑动架,与所述第一滑轨连接,能够沿所述第一滑轨移动,所述滑动架通过电缸与所述固定架连接,所述滑动架上连接有驱动齿轮以及水平方向上的第二滑轨;第一夹臂和第二夹臂,分别与所述第二滑轨连接,且分别与所述驱动齿轮啮合,所述第一夹臂和第二夹臂均连接有夹持块;驱动模块,与所述夹持块连接,用于带动所述夹持块翻转。与现有技术相比,本技术可翻转工件的质量上限高,夹紧、翻转过程稳定的特点。
技术研发人员:盛荣,徐潇晨,顾曙芬,许裕
受保护的技术使用者:上海丹景智能装备有限公司
技术研发日:20230922
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!