一种墙板部品的功能模块填装系统的制作方法
本技术涉及装配式烧结墙板的自动化生产设备,尤其是涉及一种墙板部品的功能模块填装系统。
背景技术:
1、随着现代科技的进步,房屋建造逐渐向集成化、装配化发展,将墙板生产制作成整体模块,然后运输到建筑现场进行装配安装,成为建筑领域的新趋势。在装配式建筑兴起的今天,传统的、低效的墙板生产工艺已经不能适应批量墙板的快速生产需求,针对开发装配式墙板的自动化生产线是建材类企业的迫切需求。
2、墙板是房屋中的重要承重部件,而砌块又是墙板中的主要组成部件,因此砌块多被称为墙板部品。现有墙板部品上往往开设有较多数量的孔槽,孔槽既能减轻墙板部品的整体重量,又能对墙板部品的强度等性能指标产生积极作用,在实际生产中,还能往孔槽内填装各种功能模块,使得制成的墙板具有功能特性(一般填装耐火、保温等功能材料块,使得墙板具有耐火、保温等特性),因此,在烧结墙板的自动化生产线中,功能模块的自动化填装是及其重要的一环。设计一款自动化程度高的填装设备是构成烧结墙板的自动化生产线的迫切需求,本案由此而生。
技术实现思路
1、本实用新型的目的在于解决上述现有技术的需求,提供一种墙板部品的功能模块填装系统。
2、为了实现上述目的,本实用新型采用如下技术方案:
3、一种墙板部品的功能模块填装系统,用于进行墙板部品孔槽内的功能模块填装作业,包括第一输送带、第二输送带和第三输送带,所述第一输送带和第二输送带沿一直线对接安装,所述第一输送带和第二输送带用来流转墙板部品,所述第三输送带平行于第二输送带来安装,所述第三输送带用来流转功能模块,所述第二输送带和第三输送带之间的位置安装有填装机器人,所述填装机器人包括有活动安装的机械臂,所述机械臂上连接安装有功能块抓装机构。
4、所述第一输送带和第二输送带形成有传动速度差,所述第二输送带的传动速度快于第一输送带的传动速度。
5、所述第一输送带的两侧分别安装有一个规整机构,两个所述规整机构对称布置,所述规整机构包括规整架和规整推缸,所述规整推缸固定安装在规整架上,所述规整推缸的活塞杆端连接有规整推板,所述规整推板以朝向第一输送带的中轴线方向来设置安装。
6、所述功能块抓装机构包括抓具收纳箱和功能块抓具,所述抓具收纳箱顶部安装有法兰连接座,所述功能块抓具活动安装在抓具收纳箱内,所述功能块抓具既能整体收纳在抓具收纳箱内,又能运动外延到抓具收纳箱外侧,进行功能模块的抓取操作。
7、所述功能块抓具包括升降针架和针架推缸,所述针架推缸采取垂直向下的方式安装在抓具收纳箱内,所述升降针架连接在针架推缸的活塞杆端,所述升降针架上连接安装有若干个针形抓具,所述抓具收纳箱内安装有升降导向杆,所述升降针架插装在升降导向杆上,所述抓具收纳箱底部开设有若干个出针孔,所述出针孔与针形抓具采取一一对应设置,所述升降针架下降运动的情况下,所述针形抓具能通过出针孔伸出到抓具收纳箱外侧。
8、所述针形抓具包括针体和活塞推缸,所述针体顶部开设有活塞运动槽,所述活塞运动槽内安装有活塞,所述活塞推缸安装在升降针架上,所述活塞推缸的活塞杆端连接活塞,所述针体内开设有一个主钢丝通道,所述主钢丝通道顶端与活塞运动槽连通,所述针体内开设有若干个分钢丝通道,所述分钢丝通道的高点连通主钢丝通道,所述分钢丝通道的低点贯通针体外壁,每个所述分钢丝通道内都穿装有一根辅抓钢丝,所述辅抓钢丝都延伸汇集到主钢丝通道内,并继续向上延伸,连接到活塞下端面上。
9、所述分钢丝通道的开设数量不少于三个,所述分钢丝通道以主钢丝通道为中轴线来进行均布设置,所述分钢丝通道采取弧度设计。
10、所述第二输送带上设置上有填装工作区,所述填装工作区位置安装有两个对称布置的填装定位机构,两个所述填装定位机构分列在第二输送带的两侧,所述填装定位机构包括定位架和定位推缸,所述定位推缸安装在定位架上,所述定位推缸活塞杆端连接有定位夹板,所述定位夹板以朝向第二输送带的中轴线方向来设置安装。
11、本实用新型的有益效果是:在本实用新型中,墙板部品和功能模块采取分线流转运输,通过机器人配合专用抓具来完成功能模块的填装操作,本实用新型具有自动化程度高的优点,全程无需人工配合,能满足在自动化生产线中的应用需求,本实用新型使用的抓具根据功能模块的结构特点来设计,具有抓取稳定性好,抓脱操作便捷的优点。
技术特征:
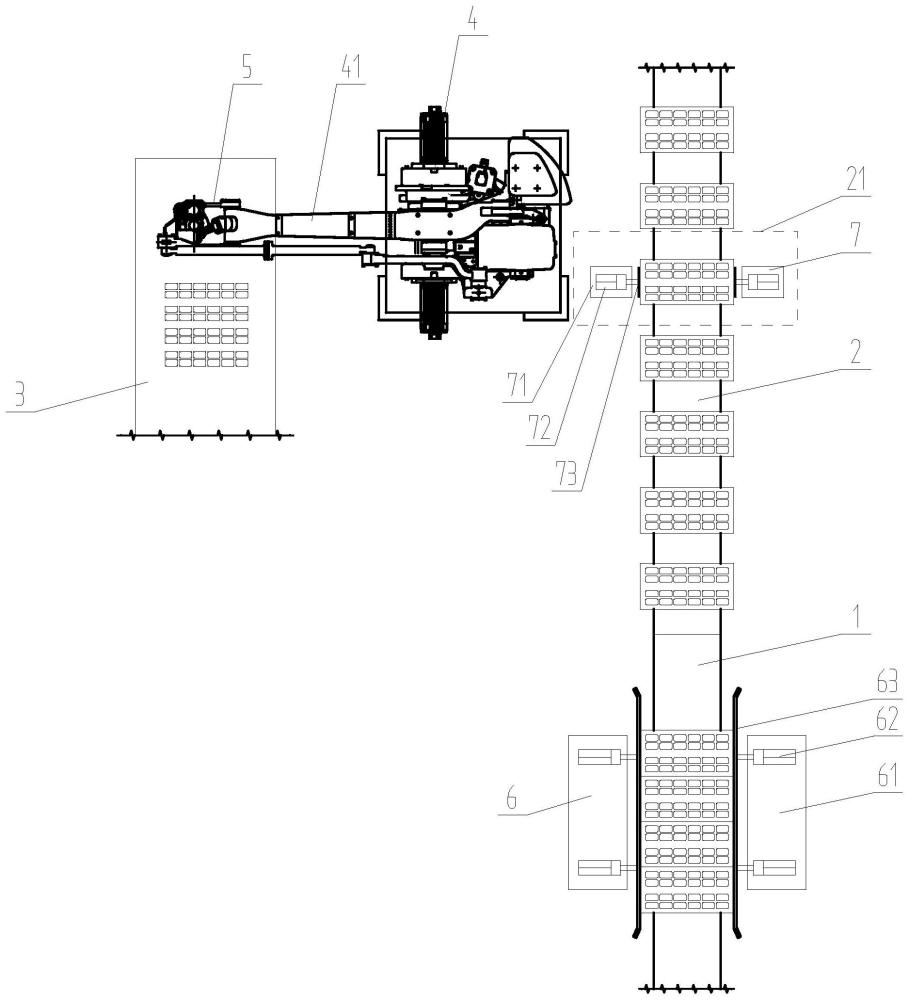
1.一种墙板部品的功能模块填装系统,用于进行墙板部品孔槽内的功能模块填装作业,包括第一输送带(1)、第二输送带(2)和第三输送带(3),其特征在于:所述第一输送带(1)和第二输送带(2)沿一直线对接安装,所述第一输送带(1)和第二输送带(2)用来流转墙板部品,所述第三输送带(3)平行于第二输送带(2)来安装,所述第三输送带(3)用来流转功能模块,所述第二输送带(2)和第三输送带(3)之间的位置安装有填装机器人(4),所述填装机器人(4)包括有活动安装的机械臂(41),所述机械臂(41)上连接安装有功能块抓装机构(5)。
2.如权利要求1所述的一种墙板部品的功能模块填装系统,其特征在于:所述第一输送带(1)和第二输送带(2)形成有传动速度差,所述第二输送带(2)的传动速度快于第一输送带(1)的传动速度。
3.如权利要求1所述的一种墙板部品的功能模块填装系统,其特征在于:所述第一输送带(1)的两侧分别安装有一个规整机构(6),两个所述规整机构(6)对称布置,所述规整机构(6)包括规整架(61)和规整推缸(62),所述规整推缸(62)固定安装在规整架(61)上,所述规整推缸(62)的活塞杆端连接有规整推板(63),所述规整推板(63)以朝向第一输送带(1)的中轴线方向来设置安装。
4.如权利要求1所述的一种墙板部品的功能模块填装系统,其特征在于:所述功能块抓装机构(5)包括抓具收纳箱(51)和功能块抓具(53),所述抓具收纳箱(51)顶部安装有法兰连接座(52),所述功能块抓具(53)活动安装在抓具收纳箱(51)内,所述功能块抓具(53)既能整体收纳在抓具收纳箱(51)内,又能运动外延到抓具收纳箱(51)外侧,进行功能模块的抓取操作。
5.如权利要求4所述的一种墙板部品的功能模块填装系统,其特征在于:所述功能块抓具(53)包括升降针架(531)和针架推缸(532),所述针架推缸(532)采取垂直向下的方式安装在抓具收纳箱(51)内,所述升降针架(531)连接在针架推缸(532)的活塞杆端,所述升降针架(531)上连接安装有若干个针形抓具(533),所述抓具收纳箱(51)内安装有升降导向杆(511),所述升降针架(531)插装在升降导向杆(511)上,所述抓具收纳箱(51)底部开设有若干个出针孔(512),所述出针孔(512)与针形抓具(533)采取一一对应设置,所述升降针架(531)下降运动的情况下,所述针形抓具(533)能通过出针孔(512)伸出到抓具收纳箱(51)外侧。
6.如权利要求5所述的一种墙板部品的功能模块填装系统,其特征在于:所述针形抓具(533)包括针体(5331)和活塞推缸(5334),所述针体(5331)顶部开设有活塞运动槽(5332),所述活塞运动槽(5332)内安装有活塞(5333),所述活塞推缸(5334)安装在升降针架(531)上,所述活塞推缸(5334)的活塞杆端连接活塞(5333),所述针体(5331)内开设有一个主钢丝通道(5335),所述主钢丝通道(5335)顶端与活塞运动槽(5332)连通,所述针体(5331)内开设有若干个分钢丝通道(5336),所述分钢丝通道(5336)的高点连通主钢丝通道(5335),所述分钢丝通道(5336)的低点贯通针体(5331)外壁,每个所述分钢丝通道(5336)内都穿装有一根辅抓钢丝(5337),所述辅抓钢丝(5337)都延伸汇集到主钢丝通道(5335)内,并继续向上延伸,连接到活塞(5333)下端面上。
7.如权利要求6所述的一种墙板部品的功能模块填装系统,其特征在于:所述分钢丝通道(5336)的开设数量不少于三个,所述分钢丝通道(5336)以主钢丝通道(5335)为中轴线来进行均布设置,所述分钢丝通道(5336)采取弧度设计。
8.如权利要求1所述的一种墙板部品的功能模块填装系统,其特征在于:所述第二输送带(2)上设置上有填装工作区(21),所述填装工作区(21)位置安装有两个对称布置的填装定位机构(7),两个所述填装定位机构(7)分列在第二输送带(2)的两侧,所述填装定位机构(7)包括定位架(71)和定位推缸(72),所述定位推缸(72)安装在定位架(71)上,所述定位推缸(72)活塞杆端连接有定位夹板(73),所述定位夹板(73)以朝向第二输送带(2)的中轴线方向来设置安装。
技术总结
本技术公开一种墙板部品的功能模块填装系统,包括第一输送带、第二输送带和第三输送带,第一输送带和第二输送带沿一直线对接安装,第三输送带平行于第二输送带来安装,第二输送带和第三输送带之间的位置安装有填装机器人,填装机器人包括有活动安装的机械臂,机械臂上连接安装有功能块抓装机构,在本技术中,墙板部品和功能模块采取分线流转运输,通过机器人配合专用抓具来完成功能模块的填装操作,本技术具有自动化程度高的优点,全程无需人工配合,能满足在自动化生产线中的应用需求,本技术使用的抓具根据功能模块的结构特点来设计,具有抓取稳定性好,抓脱操作便捷的优点。
技术研发人员:夏志勇,吕一诺,赵芝君,王东升,贾跃花,高国栋,夏杰
受保护的技术使用者:绍兴绿展环保有限公司
技术研发日:20230927
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!