一种具有传感器的小体积托盘式叉车的制作方法
本技术涉及托盘叉车,具体为一种具有传感器的小体积托盘式叉车。
背景技术:
1、小体积托盘式叉车是叉车的一种,托盘式叉车就是搬运货物作用的物流搬运设备,在使用时将其承载的货叉插入托盘孔内,由人力驱动液压系统来实现托盘货物的起升和下降,并由人力拉动完成搬运作业,它是托盘运输工具中最简便和最常见的装卸、搬运工具。
2、在对现有的小体积托盘式叉车进行使用时,其小体积托盘式叉车的作用就是搬运货物作用的物流搬运设备,但小体积托盘式叉车对于托盘式插设的控制通常都是人力拉动完成,并不具备对环境的动作的自动反馈和控制,在利用人力拉动控制叉车时,易造成因重量原因导致人力无法控制叉车,使叉车磕碰到附近的外物,造成叉车侧翻或损坏的问题。
技术实现思路
1、本实用新型的目的在于提供一种具有传感器的小体积托盘式叉车,以解决上述背景技术中提出的在利用人力拉动控制叉车时,易造成因重量原因导致人力无法控制叉车,使叉车磕碰到附近的外物,造成叉车侧翻或损坏的问题。
2、为实现上述目的,本实用新型提供如下技术方案,一种具有传感器的小体积托盘式叉车,包括叉车本体:
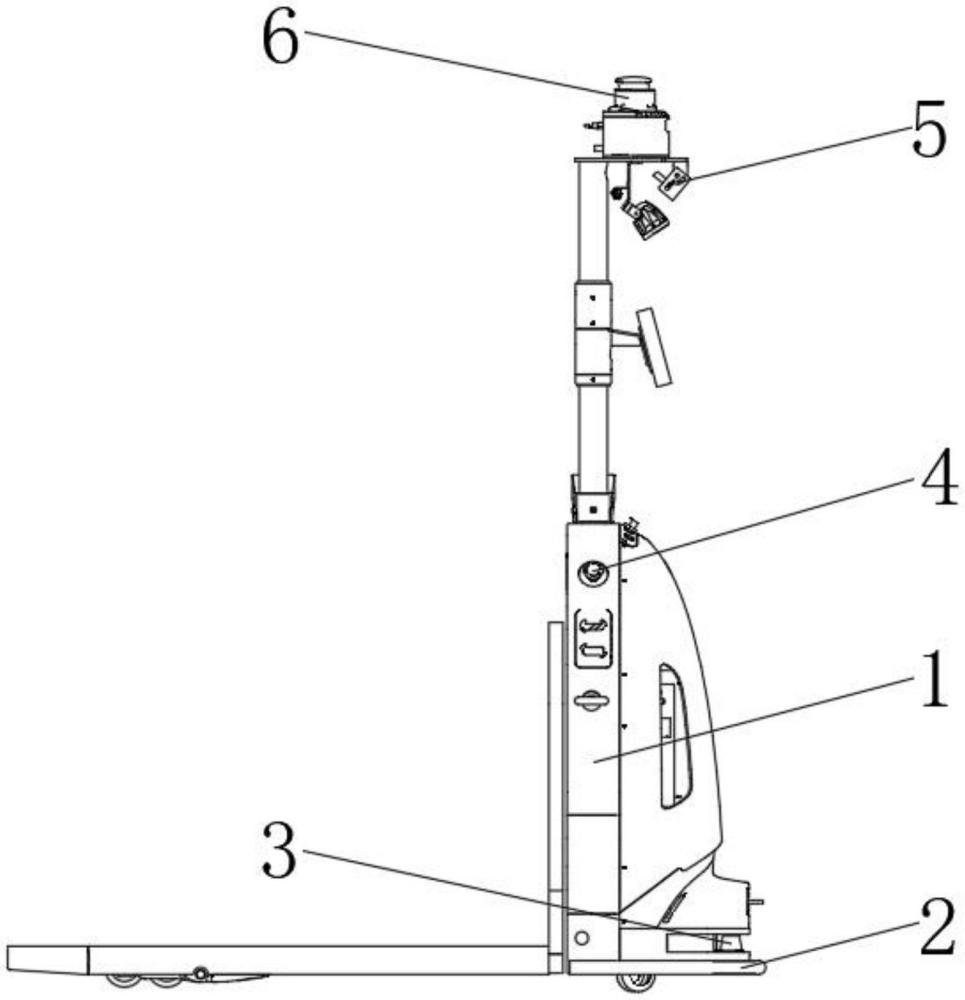
3、所述叉车本体底端一侧设置有安全触边,所述叉车本体一端外壁设置有前方底部激光避障雷达,所述叉车本体一侧设置有急停开关,所述叉车本体顶端一侧设置有立体避障相机,所述叉车本体顶端设置有激光导航雷达,所述叉车本体一端左侧设置有牙尖光电,所述一端右侧设置有牙尖相机,所述叉车本体表面下方设置有牙根光电,所述叉车本体表面上方设置有姿态识别相机,所述叉车本体内部一侧设置有转向编码器,所述叉车本体内部另一侧设置有驱动电机,所述叉车本体一侧上方设置有叉臂上限位光电传感器,所述叉车本体一侧下方设置有叉臂下限位光电传感器。
4、优选的,所述安全触边用于车头方向的被动机械防护,所述前方底部激光避障雷达用于车头及两侧方向的主动式平面防护。
5、优选的,所述立体避障相机用于车头方向的主动立体防护,所述激光导航雷达用于实时监测无人叉车在整个调度空间的相对位置。
6、优选的,所述牙尖光电用于叉臂牙尖前方的避障,所述牙尖相机用于叉臂牙尖前方的避障,所述牙根光电用于叉臂牙根前方障碍物的检测。
7、优选的,所述姿态识别相机在取货过程中用于识别货物偏转的角度,所述转向编码器用于监测与反馈舵轮实际转角的大小和方向。
8、优选的,所述驱动电机内部设置有编码器用于检测与反馈车轮实际转速,所述叉臂上限位光电传感器和叉臂下限位光电传感器用于检测叉臂是否提升或者下降到位。
9、与现有技术相比,本实用新型的有益效果是:
10、1、通过安全触边对叉车本体的车头方向进行被动机械防护,可在前面传感器均失效情况下,叉车本体发生撞车时触发报警急停,而前方底部激光避障雷达用于叉车本体的车头及两侧方向的主动式平面防护,并通过立体避障相机对叉车本体的车头方向进行主动立体防护,牙尖光电和牙尖相机对叉车本体的叉臂牙尖前方的避障效果,牙根光电用于叉车本体的叉臂牙根前方障碍物的检测,并通过激光导航雷达实时监测叉车本体在整个调度空间的相对位置,姿态识别相机在取货过程中识别货物偏转的角度,转向编码器监测与反馈叉车本体的舵轮实际转角的大小和方向,而驱动电机内置编码器,用于检测与反馈车轮实际转速,叉臂上限位光电传感器和叉臂下限位光电传感器用于检测叉车本体的叉臂是否提升或者下降到位,避免叉车本体的叉臂实际高度超出限度,避免造成因重量原因导致人力无法控制叉车,使叉车磕碰到附近的外物,造成叉车侧翻或损坏的问题。
技术特征:
1.一种具有传感器的小体积托盘式叉车,包括叉车本体(1),其特征在于:
2.根据权利要求1所述的一种具有传感器的小体积托盘式叉车,其特征在于:所述安全触边(2)用于车头方向的被动机械防护,所述前方底部激光避障雷达(3)用于车头及两侧方向的主动式平面防护。
3.根据权利要求1所述的一种具有传感器的小体积托盘式叉车,其特征在于:所述立体避障相机(5)用于车头方向的主动立体防护,所述激光导航雷达(6)用于实时监测无人叉车在整个调度空间的相对位置。
4.根据权利要求1所述的一种具有传感器的小体积托盘式叉车,其特征在于:所述牙尖光电(7)用于叉臂牙尖前方的避障,所述牙尖相机(8)用于叉臂牙尖前方的避障,所述牙根光电(9)用于叉臂牙根前方障碍物的检测。
5.根据权利要求1所述的一种具有传感器的小体积托盘式叉车,其特征在于:所述姿态识别相机(10)在取货过程中用于识别货物偏转的角度,所述转向编码器(11)用于监测与反馈舵轮实际转角的大小和方向。
6.根据权利要求5所述的一种具有传感器的小体积托盘式叉车,其特征在于:所述驱动电机(12)内部设置有编码器用于检测与反馈车轮实际转速,所述叉臂上限位光电传感器(13)和叉臂下限位光电传感器(14)用于检测叉臂是否提升或者下降到位。
技术总结
本技术涉及托盘叉车技术领域,具体为一种具有传感器的小体积托盘式叉车,包括叉车本体:所述叉车本体底端一侧设置有安全触边,所述叉车本体一端外壁设置有前方底部激光避障雷达,所述叉车本体一侧设置有急停开关,所述叉车本体顶端一侧设置有立体避障相机,所述叉车本体顶端设置有激光导航雷达。本技术经安全触边对叉车本体的车头方向进行被动机械防护,叉臂上限位光电传感器和叉臂下限位光电传感器用于检测叉车本体的叉臂是否提升或者下降到位,避免叉车本体的叉臂实际高度超出限度,避免造成因重量原因导致人力无法控制叉车,使叉车磕碰到附近的外物,造成叉车侧翻或损坏的问题。
技术研发人员:陈文成,吕朝顺,苏伟鹏
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:20231109
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!