一种壳体自动夹抱装置的制作方法
本技术属于产品输送设备,尤其涉及一种壳体自动夹抱装置。
背景技术:
1、为了满足质检或贴标需要,部分产品在产线中需要改变方位,以便于后期扫描检测与贴标或印刷等需要,现有技术中主要通过机械手抱起产品调整方向。
2、由于常规的抱紧机构直接通过机械手驱动夹紧时,部分产品的抗压强度比较低,直到进行夹紧容易夹伤或夹坏产品,从而造成常规的夹抱机构的实用性比较低的问题。
3、为此,我们提出来一种壳体自动夹抱装置解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决常规的夹抱机构的实用性比较低的问题,而提出的一种壳体自动夹抱装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种壳体自动夹抱装置,包括第一机械手,所述第一机械手上固定连接有抱架,所述抱架的内部固定连接有第二机械手,所述第二机械手对称固定连接在抱架内,所述第二机械手上固定连接有活动架,所述活动架上固定连接有定位主体和挤压板,所述第一机械手的前侧设有输送机,所述输送机的前端固定连接有固定柱,所述固定柱的上部固定连接有摄像头,所述定位主体包括第一安装座,第一安装座与活动架固定连接,第一安装座的内部滑动贯穿有滑杆,所述滑杆的外侧套有弹簧,所述滑杆的后端固定连接有压板,所述弹簧的一端与第一安装座固定连接,所述弹簧的另一端与压板固定连接,所述第一安装座的上部前端固定连接有光电传感器,所述滑杆上设置有定位标记。利用第一机械手带动第二机械手套在货物上,再驱动第二机械手带动活动架压向货物,使定位主体和挤压板压向货物,过程中,利用货物作用于压板,使压板带动滑杆克服弹簧的弹力向外移动,直到光电传感器接收到滑杆上的定位标记信号后,表示挤压板挤压到位,此时通过第二机械手进一步带动活动架微幅度挤压,方便保障抱紧货物且避免夹坏货物,提高了实用性。
4、优选的,所述第一机械手的外侧设有挡网。利用挡网罩在第一机械手外,避免第一机械手活动伤人,提高了使用安全系数。
5、优选的,所述挡网的下端固定连接有第二安装座。通过第二安装座方便挡网借助螺丝固定在地面。
6、优选的,所述定位主体还包括防滑垫,所述防滑垫固定连接在压板的后端。利用防滑垫增加压板与货物之间的摩擦力。
7、优选的,所述定位主体还包括导套,所述滑杆滑动贯穿导套,所述导套与第一安装座固定连接。利用导套增加第一安装座对滑杆的滑动引导范围,提高了滑杆滑动方向的稳定性。
8、优选的,所述抱架包括架体和第三安装座,所述第三安装座固定连接在架体的后部。
9、优选的,所述活动架包括框形架和安装杆,所述安装杆固定连接在框形架的内端。
10、综上所述,本实用新型的技术效果和优点:
11、1、利用第一机械手带动第二机械手套在货物上,再驱动第二机械手带动活动架压向货物,使定位主体和挤压板压向货物,过程中,利用货物作用于压板,使压板带动滑杆克服弹簧的弹力向外移动,直到光电传感器接收到滑杆上的定位标记信号后,表示挤压板挤压到位,此时通过第二机械手进一步带动活动架微幅度挤压,方便保障抱紧货物且避免夹坏货物,提高了实用性。
技术特征:
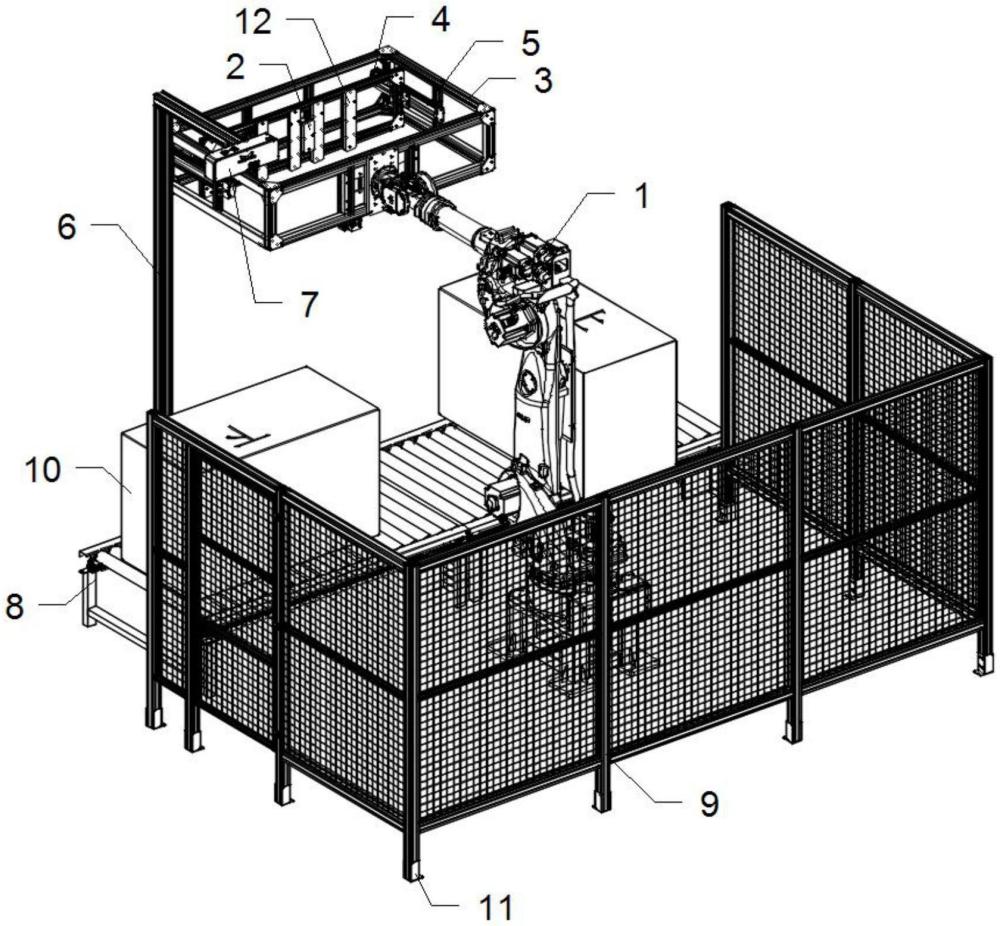
1.一种壳体自动夹抱装置,其特征在于:包括第一机械手(1),所述第一机械手(1)上固定连接有抱架(3),所述抱架(3)的内部固定连接有第二机械手(5),所述第二机械手(5)对称固定连接在抱架(3)内,所述第二机械手(5)上固定连接有活动架(4),所述活动架(4)上固定连接有定位主体(2)和挤压板(12),所述第一机械手(1)的前侧设有输送机(8),所述输送机(8)的前端固定连接有固定柱(6),所述固定柱(6)的上部固定连接有摄像头(7),所述定位主体(2)包括第一安装座(21),第一安装座(21)与活动架(4)固定连接,第一安装座(21)的内部滑动贯穿有滑杆(25),所述滑杆(25)的外侧套有弹簧(22),所述滑杆(25)的后端固定连接有压板(24),所述弹簧(22)的一端与第一安装座(21)固定连接,所述弹簧(22)的另一端与压板(24)固定连接,所述第一安装座(21)的上部前端固定连接有光电传感器(27),所述滑杆(25)上设置有定位标记。
2.根据权利要求1所述的一种壳体自动夹抱装置,其特征在于:所述第一机械手(1)的外侧设有挡网(9)。
3.根据权利要求2所述的一种壳体自动夹抱装置,其特征在于:所述挡网(9)的下端固定连接有第二安装座(11)。
4.根据权利要求1所述的一种壳体自动夹抱装置,其特征在于:所述定位主体(2)还包括防滑垫(23),所述防滑垫(23)固定连接在压板(24)的后端。
5.根据权利要求1所述的一种壳体自动夹抱装置,其特征在于:所述定位主体(2)还包括导套(26),所述滑杆(25)滑动贯穿导套(26),所述导套(26)与第一安装座(21)固定连接。
6.根据权利要求1所述的一种壳体自动夹抱装置,其特征在于:所述抱架(3)包括架体(31)和第三安装座(32),所述第三安装座(32)固定连接在架体(31)的后部。
7.根据权利要求1所述的一种壳体自动夹抱装置,其特征在于:所述活动架(4)包括框形架(41)和安装杆(42),所述安装杆(42)固定连接在框形架(41)的内端。
技术总结
本技术公开了一种壳体自动夹抱装置,属于产品输送设备技术领域,包括第一机械手,所述第一机械手上固定连接有抱架,所述抱架的内部固定连接有第二机械手,所述第二机械手对称固定连接在抱架内,所述第二机械手上固定连接有活动架,所述活动架上固定连接有定位主体和挤压板,所述第一机械手的前侧设有输送机,使定位主体和挤压板压向货物,过程中,利用货物作用于压板,使压板带动滑杆克服弹簧的弹力向外移动,直到光电传感器接收到滑杆上的定位标记信号后,表示挤压板挤压到位,此时通过第二机械手进一步带动活动架微幅度挤压,方便保障抱紧货物且避免夹坏货物,提高了实用性。
技术研发人员:邓鑫
受保护的技术使用者:昆山世度机械科技有限公司
技术研发日:20231115
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!