一种图像识别智能垃圾分类垃圾桶
本技术涉及垃圾分类,特别涉及一种图像识别智能垃圾分类垃圾桶。
背景技术:
1、垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称,垃圾分类的目的是提高垃圾的资源价值和经济价值,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。
2、中国专利文献cn215973261 u公开了一种图像识别智能垃圾分类垃圾桶,包括壳体,所述壳体内部一侧开设有液体储存槽,所述壳体内部在靠近所述液体储存槽一侧开设有液体垃圾槽,所述壳体在所述液体垃圾槽另一侧依次开设有多个分类垃圾槽,所述分类垃圾槽和所述液体垃圾槽顶面活动安装有密封盖,所述密封盖侧面通过设置有驱动装置活动安装有活动门,所述液体储存槽顶面活动安装有控制盒,所述控制盒一侧表面中心固定安装有ccd摄像头,所述控制盒内部嵌入有处理器。上述实用新型可以实现依靠拍摄垃圾照片对垃圾进行分类,并打开该类别的垃圾桶,使人们可以准确的将垃圾放置入合适的垃圾桶内;但是在具体实施过程中还存在以下缺陷:
3、上述专利文献在使用过程中,对垃圾类别进行识别后,缺少自动投入功能,需要人手动将垃圾投入垃圾桶内,会使使用者感到浪费时间,可能会出现随意丢弃的现象。
技术实现思路
1、本实用新型的主要目的在于提供一种图像识别智能垃圾分类垃圾桶,可以有效解决缺少自动投入功能的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
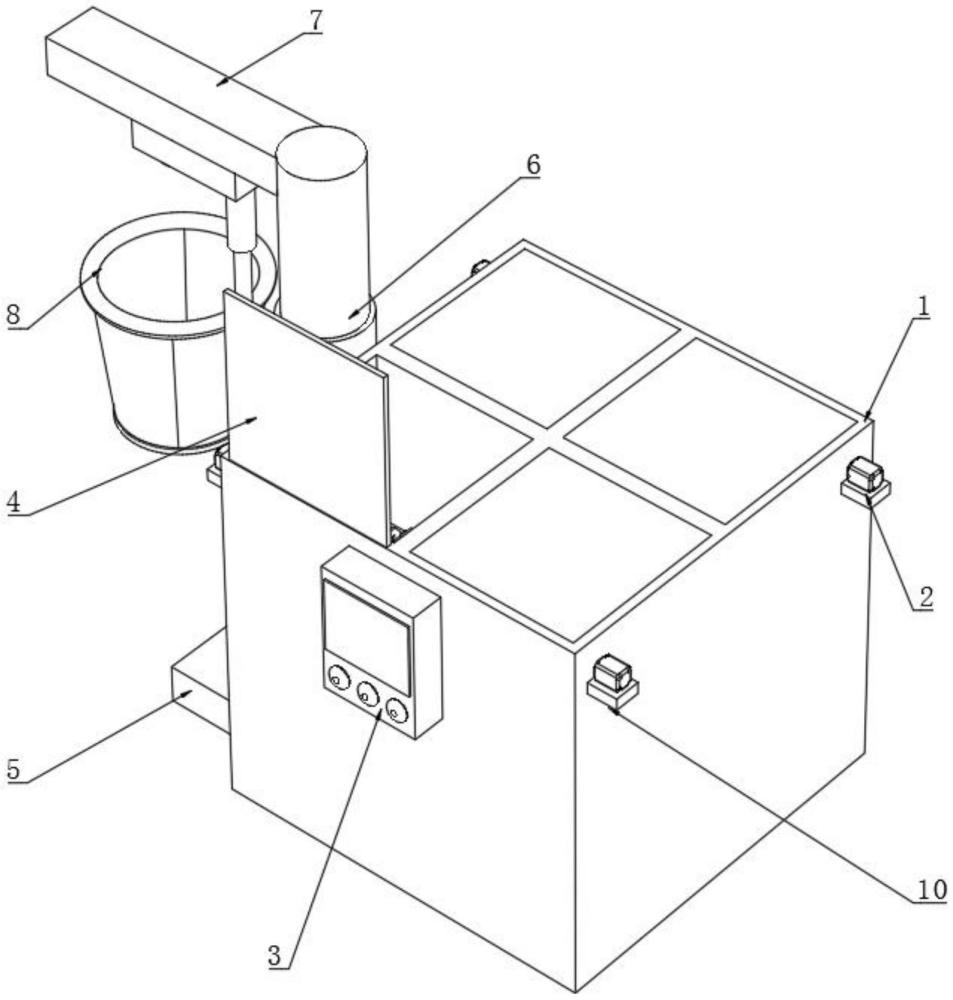
3、一种图像识别智能垃圾分类垃圾桶,包括分类垃圾桶本体,所述分类垃圾桶本体前后两端均固定连接有两个支撑板,四个所述支撑板上端均固定连接有开合机构,四个所述开合机构上部均固定连接有桶盖,所述分类垃圾桶本体左端固定连接有显示控制器,所述分类垃圾桶本体前端固定连接有连接块,所述连接块上端固定连接有转动机构,所述转动机构上端固定连接有电动伸缩杆,所述电动伸缩杆外表面固定连接有电导轨,所述电导轨内腔滑动连接有识别机构。
4、优选的,所述开合机构包括电机一,所述电机一下端与支撑板上端固定连接,所述电机一的输出端通过联轴器固定连接有驱动件,所述驱动件外部滑动连接有定位件。
5、优选的,所述驱动件包括驱动板,所述驱动板前端固定连接有短滑杆,所述驱动板内表面固定连接有联动杆,所述联动杆外表面固定连接有连杆,所述连杆内表面固定连接有连接头,所述连接头前端与电机一的输出端通过联轴器固定连接。
6、优选的,所述定位件包括定位板,所述定位板前端开设有y型滑槽,所述定位板前端开设有两个安装孔。
7、优选的,所述转动机构包括电机二和外壳,所述电机二和外壳下端均与连接块上端固定连接,所述电机二的输出端通过联轴器固定连接有伞形齿轮组,所述伞形齿轮组上端固定连接有传动杆,所述传动杆上端与电动伸缩杆下端固定连接。
8、优选的,所述识别机构包括滑块,所述滑块外表面与电导轨内腔滑动连接,所述滑块下端固定连接有连接板,所述连接板下端固定连接有连接杆和识别探头,所述连接杆下端固定连接有放置篓,所述放置篓外表面固定连接有电机三,所述电机三的输出端通过联轴器固定连接有驱动头,所述识别探头内表面固定连接有挡板。
9、优选的,所述短滑杆外表面和联动杆外表面均与y型滑槽内腔滑动连接。
10、优选的,两个所述驱动板上端与桶盖下端固定连接。
11、与现有技术相比,本实用新型具有如下有益效果:
12、1、本实用新型通过显示控制器,控制开合机构、驱动件、转动机构、电动伸缩杆、识别机构相互配合,能在对垃圾进行识别后,自动打开所属类别的垃圾桶桶盖,然后自动将垃圾放入其中,减少了人们扔垃圾的等待时间,只需将垃圾放入识别机构内部即可离开,提升了垃圾桶的实用性。
13、2、本实用新型通过识别探头对垃圾进行识别,使用者只需将垃圾放入放置篓中,识别探头就能对垃圾类别进行分类,然后通过电动伸缩杆配合转动机构使垃圾篓可以被转移至该垃圾所放置的垃圾桶上方,将垃圾丢入其中,提升了垃圾桶的实用性。
技术特征:
1.一种图像识别智能垃圾分类垃圾桶,包括分类垃圾桶本体(1),其特征在于:所述分类垃圾桶本体(1)前后两端均固定连接有两个支撑板(10),四个所述支撑板(10)上端均固定连接有开合机构(2),四个所述开合机构(2)上部均固定连接有桶盖(4),所述分类垃圾桶本体(1)左端固定连接有显示控制器(3),所述分类垃圾桶本体(1)前端固定连接有连接块(5),所述连接块(5)上端固定连接有转动机构(9),所述转动机构(9)上端固定连接有电动伸缩杆(6),所述电动伸缩杆(6)外表面固定连接有电导轨(7),所述电导轨(7)内腔滑动连接有识别机构(8)。
2.根据权利要求1所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述开合机构(2)包括电机一(21),所述电机一(21)下端与支撑板(10)上端固定连接,所述电机一(21)的输出端通过联轴器固定连接有驱动件(22),所述驱动件(22)外部滑动连接有定位件(23)。
3.根据权利要求2所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述驱动件(22)包括驱动板(221),所述驱动板(221)前端固定连接有短滑杆(222),所述驱动板(221)内表面固定连接有联动杆(223),所述联动杆(223)外表面固定连接有连杆(224),所述连杆(224)内表面固定连接有连接头(225),所述连接头(225)前端与电机一(21)的输出端通过联轴器固定连接。
4.根据权利要求3所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述定位件(23)包括定位板(231),所述定位板(231)前端开设有y型滑槽(232),所述定位板(231)前端开设有两个安装孔(233)。
5.根据权利要求1所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述转动机构(9)包括电机二(91)和外壳(92),所述电机二(91)和外壳(92)下端均与连接块(5)上端固定连接,所述电机二(91)的输出端通过联轴器固定连接有伞形齿轮组(93),所述伞形齿轮组(93)上端固定连接有传动杆(94),所述传动杆(94)上端与电动伸缩杆(6)下端固定连接。
6.根据权利要求1所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述识别机构(8)包括滑块(81),所述滑块(81)外表面与电导轨(7)内腔滑动连接,所述滑块(81)下端固定连接有连接板(82),所述连接板(82)下端固定连接有连接杆(83)和识别探头(84),所述连接杆(83)下端固定连接有放置篓(85),所述放置篓(85)外表面固定连接有电机三(86),所述电机三(86)的输出端通过联轴器固定连接有驱动头(87),所述识别探头(84)内表面固定连接有挡板(88)。
7.根据权利要求4所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:所述短滑杆(222)外表面和联动杆(223)外表面均与y型滑槽(232)内腔滑动连接。
8.根据权利要求3所述的一种图像识别智能垃圾分类垃圾桶,其特征在于:两个所述驱动板(221)上端与桶盖(4)下端固定连接。
技术总结
本技术公开了一种图像识别智能垃圾分类垃圾桶,具体涉及垃圾分类技术领域,包括分类垃圾桶本体,所述分类垃圾桶本体前后两端均固定连接有两个支撑板,四个所述支撑板上端均固定连接有开合机构,所述分类垃圾桶本体前端固定连接有连接块,所述连接块上端固定连接有转动机构,所述转动机构上端固定连接有电动伸缩杆,所述电动伸缩杆外表面固定连接有电导轨,所述电导轨内腔滑动连接有识别机构。本技术所述的一种图像识别智能垃圾分类垃圾桶,通过显示控制器,控制开合机构、驱动件、转动机构、电动伸缩杆、识别机构相互配合,能在对垃圾进行识别后,自动打开所属类别的垃圾桶桶盖,然后自动将垃圾放入其中,提升了垃圾桶的实用性。
技术研发人员:李珊,伍玉霞,廖秋丽
受保护的技术使用者:桂林电子科技大学
技术研发日:20231122
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!