取箱装置及物流机器人的制作方法
本申请涉及仓储设备,尤其涉及一种取箱装置及物流机器人。
背景技术:
1、物流机器人(也称为搬运机器人)是仓储系统中的重要设备,能够将目标物品(例如货箱)从仓储系统中的其中一个位置搬运至另一个位置进行处理;另外,物流机器人还可将目标物品自动放置到目标载具(例如货架)上,完成上料过程(例如还箱过程);也能够将目标物品从目标载具上取下,并运送至另一指定位置。
2、为提升物流机器人运送目标物品的效率,相关技术中,采用降低物流机器人的高度,提升物流机器人的行走的速度的方式,提升物流机器人对目标物品的搬运效率。
3、但是,相关技术中的物流机器人单次搬运目标物品的搬运数量有限,导致物流机器人的搬运效率较低。
技术实现思路
1、本申请实施例提供一种取箱装置及物流机器人,可提升物流机器人单次搬运目标物品的数量,提升物流机器人的搬运效率。
2、根据本申请实施例的第一个方面,提供了一种取箱装置,包括:
3、承载件,承载件上具有多个承载位,承载位用于承载目标物品;
4、取物组件,取物组件设于承载件,取物组件可选择性地伸出或退回承载件,以在目标货位与承载位之间往复运动;且取物组件可选择性地在多个承载位之间移动,以在承载位与多个目标货位中的其中一个之间转移目标物品。
5、在一种可选的实现方式中,取箱装置还包括第一驱动结构,第一驱动结构与取物组件相连接,第一驱动结构被配置为驱动取物组件在多个承载位之间移动。
6、在一种可选的实现方式中,第一驱动结构包括:
7、第一传动件,第一传动件沿多个承载位的排布方向延伸,取物组件设于第一传动件上;
8、第一驱动件,第一驱动件与第一传动件连接,第一驱动件被配置为驱动第一传动件运动,以带动取物组件在多个承载位之间移动。
9、在一种可选的实现方式中,第一驱动件具有电机编码器;电机编码器被配置为确定取物组件在多个承载位之间移动的距离,以确定取物组件在各个承载位上的取物位置。
10、在一种可选的实现方式中,第一传动件包括丝杠和传动带中的任意一者。
11、在一种可选的实现方式中,取箱装置还包括第一滑轨,第一滑轨沿多个承载位的排布方向延伸,取物组件设于第一滑轨上,且取物组件可沿第一滑轨的延伸方向移动。
12、在一种可选的实现方式中,取箱装置还包括第二驱动结构,第二驱动结构设于承载件,第二驱动结构被配置为驱动取物组件伸出或退回承载件。
13、在一种可选的实现方式中,第二驱动结构包括:
14、第二传动件,第二传动件与第一驱动结构相连接;
15、第二驱动件,第二驱动件设于承载件上,第二驱动件被配置为驱动第一驱动结构沿取物方向移动,以带动取物组件伸出或退回承载件。
16、在一种可选的实现方式中,取箱装置还包括第二滑轨,第二滑轨设于承载件上,且第二滑轨沿取物方向延伸;第一驱动结构滑动设于第二滑轨上。
17、在一种可选的实现方式中,第二滑轨包括两条,两条第二滑轨相对设置于第一驱动结构的两端。
18、在一种可选的实现方式中,取箱装置还包括安装座;安装座滑动设置于第二滑轨上;第一驱动结构设于安装座上。
19、在一种可选的实现方式中,安装座上设有避让部,避让部被配置为避让第二驱动件。
20、在一种可选的实现方式中,
21、第二驱动结构包括:
22、第二传动件,第二传动件与取物组件相连接;
23、第二驱动件,第二驱动件设于第一驱动结构上,第二驱动件被配置为驱动取物组件伸出或退回承载件;
24、第一驱动结构被配置为沿多个承载位的排布方向驱动第二驱动结构,以带动取物组件在多个承载位之间移动。
25、在一种可选的实现方式中,承载件具有底壁和顶壁,底壁和顶壁之间构建形成容纳目标物品的容纳空间;
26、取物组件位于容纳空间内。
27、在一种可选的实现方式中,底壁上设有分隔件,分隔件被配置为将底壁分隔为多个并排排布的承载位;分隔件的前端具有引导斜面,引导斜面与承载件的侧壁构建形成缩口状结构。
28、在一种可选的实现方式中,分隔件凸出于底壁的距离小于或等于取物组件与底壁之间的间距;
29、或者,
30、分隔件上具有避让缺口,避让缺口连通相邻两个承载位,取物组件通过避让缺口在相邻两个承载位之间移动。
31、在一种可选的实现方式中,取物组件包括安装板和吸盘,安装板设于承载件,吸盘设置于安装板上,且被配置为吸附目标物品;
32、或者,取物组件包括钩爪结构,钩爪结构被配置为钩接目标物品。
33、根据本申请实施例的第二个方面,提供了一种物流机器人,包括:
34、底盘;
35、举升机构,举升机构设于底盘上;以及,
36、本申请实施例第一个方面任一可选的实现方式所提供的取箱装置,取箱装置设于举升机构上;举升机构被配置为沿竖直方向升降取箱装置。
37、在一种可选的实现方式中,举升机构包括剪刀叉结构、伸缩气缸、直线电机或升降门架中的任意一者。
38、本申请实施例提供的取箱装置和物流机器人,通过在承载件上设置多个承载位,并将设于承载件上的取物组件设置为可在多个承载位之间移动;这样,取物组件可以在目标货位与其中一个承载位之间完成目标物品转移之后,切换至其他承载位,并完成其他承载位与目标货位之间的目标物品转移;也就是说,取箱装置一次可以放置多个目标物品,从而使得物流机器人单次可以转移运输多个目标物品,提升了物流机器人单次搬运目标物品的数量,提升了物流机器人的搬运效率。
技术特征:
1.一种取箱装置,其特征在于,包括:
2.根据权利要求1所述的取箱装置,其特征在于,所述取箱装置(10)还包括第一驱动结构(130),所述第一驱动结构(130)与所述取物组件(120)相连接,所述第一驱动结构(130)被配置为驱动所述取物组件(120)在多个所述承载位(111)之间移动。
3.根据权利要求2所述的取箱装置,其特征在于,所述第一驱动结构(130)包括:
4.根据权利要求3所述的取箱装置,其特征在于,所述第一驱动件(132)具有电机编码器;所述电机编码器被配置为确定所述取物组件(120)在多个所述承载位(111)之间移动的距离,以确定所述取物组件(120)在各个所述承载位(111)上的取物位置。
5.根据权利要求3所述的取箱装置,其特征在于,所述第一传动件(131)包括丝杠和传动带中的任意一者。
6.根据权利要求2所述的取箱装置,其特征在于,所述取箱装置(10)还包括第一滑轨(140),所述第一滑轨(140)沿多个所述承载位(111)的排布方向延伸,所述取物组件(120)设于所述第一滑轨(140)上,且所述取物组件(120)可沿所述第一滑轨(140)的延伸方向移动。
7.根据权利要求2-6任一项所述的取箱装置,其特征在于,所述取箱装置(10)还包括第二驱动结构(150),所述第二驱动结构(150)设于所述承载件(110),所述第二驱动结构(150)被配置为驱动所述取物组件(120)伸出或退回所述承载件(110)。
8.根据权利要求7所述的取箱装置,其特征在于,所述第二驱动结构(150)包括:
9.根据权利要求8所述的取箱装置,其特征在于,所述取箱装置(10)还包括第二滑轨(160),所述第二滑轨(160)设于所述承载件(110)上,且所述第二滑轨(160)沿所述取物方向延伸;所述第一驱动结构(130)滑动设于所述第二滑轨(160)上。
10.根据权利要求9所述的取箱装置,其特征在于,所述第二滑轨(160)包括两条,两条所述第二滑轨(160)相对设置于所述第一驱动结构(130)的两端。
11.根据权利要求10所述的取箱装置,其特征在于,所述取箱装置(10)还包括安装座(170);所述安装座(170)滑动设置于所述第二滑轨(160)上;所述第一驱动结构(130)设于所述安装座(170)上。
12.根据权利要求11所述的取箱装置,其特征在于,所述安装座(170)上设有避让部(171),所述避让部(171)被配置为避让所述第二驱动件(152)。
13.根据权利要求7所述的取箱装置,其特征在于,所述第二驱动结构(150)包括:
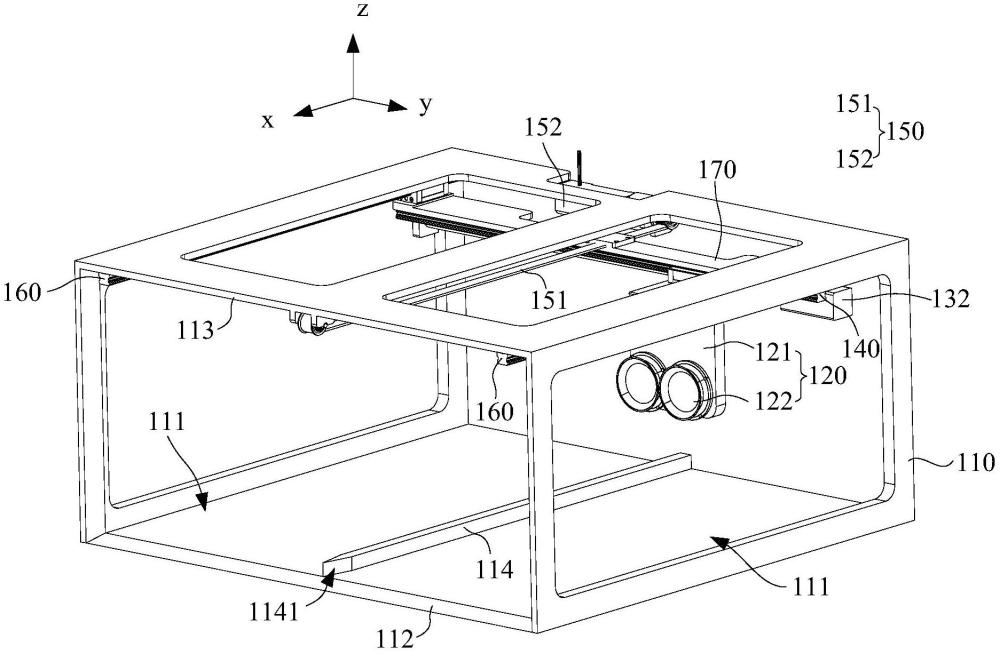
14.根据权利要求1-6任一项所述的取箱装置,其特征在于,所述承载件(110)具有底壁(112)和顶壁(113),所述底壁(112)和所述顶壁(113)之间构建形成容纳所述目标物品的容纳空间;
15.根据权利要求14所述的取箱装置,其特征在于,所述底壁(112)上设有分隔件(114),所述分隔件(114)被配置为将所述底壁(112)分隔为多个并排排布的所述承载位(111);所述分隔件(114)的前端具有引导斜面(1141),所述引导斜面(1141)与所述承载件(110)的侧壁构建形成缩口状结构。
16.根据权利要求15所述的取箱装置,其特征在于,所述分隔件(114)凸出于所述底壁(112)的距离小于或等于所述取物组件(120)与所述底壁(112)之间的间距;
17.根据权利要求1-6任一项所述的取箱装置,其特征在于,所述取物组件(120)包括安装板(121)和吸盘(122),所述安装板(121)设于所述承载件(110),所述吸盘(122)设置于所述安装板(121)上,且被配置为吸附目标物品;
18.一种物流机器人,其特征在于,包括:
19.根据权利要求18所述的物流机器人,其特征在于,所述举升机构(30)包括剪刀叉结构、伸缩气缸、直线电机或升降门架中的任意一者。
技术总结
本申请实施例提供了一种取箱装置及物流机器人,其中,取箱装置包括:承载件,承载件上具有多个承载位,承载位用于承载目标物品;取物组件,取物组件设于承载件,取物组件可选择性地伸出或退回承载件,以在目标货位与承载位之间往复运动;且取物组件可选择性地在多个承载位之间移动,以在承载位与多个目标货位中的其中一个之间转移目标物品。根据本申请实施例提供的取箱装置及物流机器人,可提升物流机器人单次搬运目标物品的数量,提升物流机器人的搬运效率。
技术研发人员:袁李
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:20231129
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!