底壳自动翻转工装及底壳生产线的制作方法
本技术涉及厨房电器,特别涉及一种底壳自动翻转工装及底壳生产线。
背景技术:
1、目前的灶具车间生产的底壳经过前工序激光打码后,需要人工或机械机手将底壳翻转180度后手动安装电池盒,但是采用人工翻转费时费力,影响生产效率,采用机械手抓取然后翻转,投资比较大,而且浪费空间,不容易安装在流水线上。
技术实现思路
1、本实用新型的目的在于解决现有技术中存在的上述至少一个问题和/或其他问题。
2、为实现本实用新型目的,本实用新型采用如下技术方案:
3、根据本实用新型的第一个方面,提供了一种底壳自动翻转工装,所述底壳自动翻转工装包括:
4、支撑组件,包括支撑架和连接板;
5、纵向运动组件,一端连接于所述支撑架,另一端可拆卸连接于所述连接板;
6、水平运动组件,连接于所述连接板远离所述纵向运动组件的一侧,并在所述纵向运动组件的驱动下做升降运动,所述水平运动组件包括水平驱动部;
7、旋转抓取组件,一端连接于所述水平驱动部的驱动端,另一端可夹取底壳,且旋转抓取组件可驱动所述底壳进行旋转;
8、其中,所述纵向运动组件和所述水平驱动部可驱动所述旋转抓取组件靠近或远离所述底壳,以便于所述旋转抓取组件夹取或释放所述底壳。
9、根据本实用新型的一实施方式,其中,所述水平运动组件和所述旋转抓取组件分别为两个且一一对应,两个所述水平运动组件对称分布于所述连接板的两侧,且两个所述水平驱动部的运动方向相反;
10、其中,两个所述水平驱动部驱动带动所述旋转抓取组件进行相对或相向运动。
11、根据本实用新型的一实施方式,其中,每个所述水平运动组件均包括:
12、水平驱动部,连接于所述连接板;
13、水平导向部,位于所述水平驱动部的外侧,且连接于所述连接板,用于对所述水平驱动部的运动进行导向;
14、连接杆,连接于所述水平驱动部和所述旋转抓取组件之间。
15、根据本实用新型的一实施方式,其中,所述水平驱动部包括水平气缸,所述水平气缸包括气缸壳体、气缸杆,所述气缸壳体固接于所述连接板;
16、所述水平导向部包括固接于所述连接板的导轨、滑块,所述滑块的一端滑动连接于所述导轨,另一端连接于所述气缸杆,所述气缸杆推动所述滑块沿所述导轨进行直线运动。
17、根据本实用新型的一实施方式,其中,所述旋转抓取组件包括旋转驱动部和抓取部,所述旋转驱动部的连接于所述连接杆和所述抓取部之间,所述转驱动部用于驱动所述抓取部旋转,以使得所述底壳被配置在第一位置和第二位置。
18、根据本实用新型的一实施方式,其中,所述抓取部为两个且对称设置,在两个所述抓取部靠近或远离的过程中实现对所述底壳的抓取或释放。
19、根据本实用新型的一实施方式,其中,所述纵向运动组件包括纵向驱动部和用于对所述连接板的运动进行导向的纵向导向部,所述纵向导向部包括:
20、导向筒,固接于所述支撑架的顶部;
21、导向杆,底部连接于所述连接板,顶部插入所述导向筒,并可沿所述导向筒的轴线进行滑动。
22、根据本实用新型的一实施方式,其中,还包括用于感应所述底壳位置的位置传感器,所述位置传感器连接于所述支撑架。
23、根据本实用新型的一实施方式,其中,还包括控制器,所述控制器连接于所述纵向运动组件、水平运动组件、旋转抓取组件和位置传感器。
24、根据本实用新型的第二个方面,提供了一种底壳生产线,所述底壳生产线包括如第一方面所述的底壳自动翻转工装。
25、本实用新型中的一个实施例具有如下优点或有益效果:
26、本实用新型通过所述纵向运动组件、所述水平运动组件和所述旋转抓取组件的配合,能高效、快速地将所述底壳进行翻转,省人省力,节约生产车间空间,提高车间空间利用率,提高生产效率。
27、通过所述纵向导向部和所述横向导向部,对相应的运动进行导向,保证及时准确地抓取所述底壳,提高生成效率。
技术特征:
1.一种底壳自动翻转工装,其特征在于,包括:
2.根据权利要求1所述的底壳自动翻转工装,其特征在于,所述水平运动组件(3)和所述旋转抓取组件(4)分别为两个且一一对应,两个所述水平运动组件(3)对称分布于所述连接板(12)的两侧,且两个所述水平驱动部(31)的运动方向相反;
3.根据权利要求2所述的底壳自动翻转工装,其特征在于,每个所述水平运动组件(3)均包括:
4.根据权利要求3所述的底壳自动翻转工装,其特征在于,所述水平驱动部(31)包括水平气缸(311),所述水平气缸(311)包括气缸壳体(3111)、气缸杆(3112),所述气缸壳体(3111)固接于所述连接板(12);
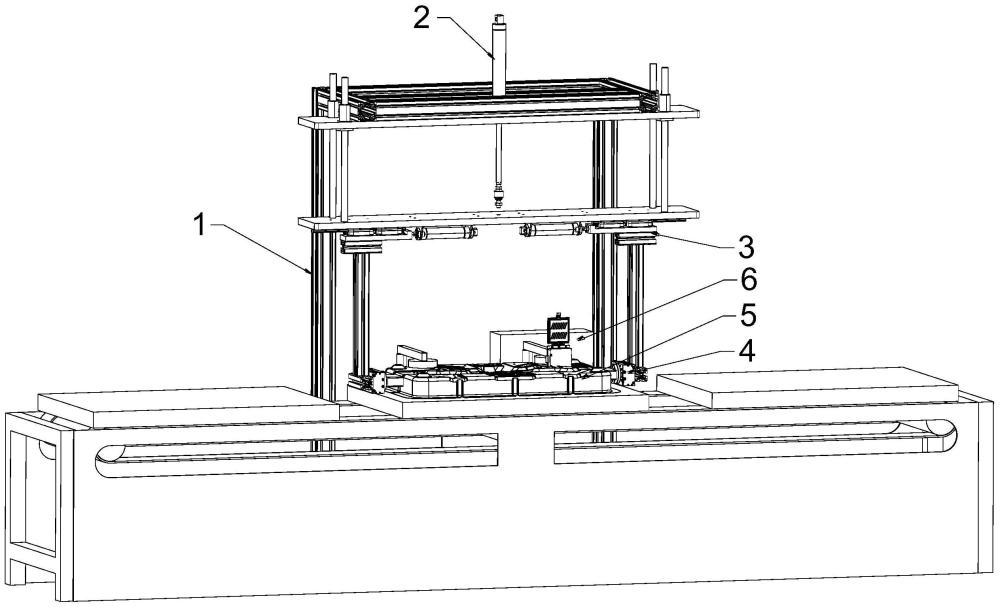
5.根据权利要求3所述的底壳自动翻转工装,其特征在于,所述旋转抓取组件(4)包括旋转驱动部(41)和抓取部(42),所述旋转驱动部(41)的连接于所述连接杆(33)和所述抓取部(42)之间,所述转驱动部(41)用于驱动所述抓取部(42)旋转,以使得所述底壳(5)被配置在第一位置和第二位置。
6.根据权利要求5所述的底壳自动翻转工装,其特征在于,所述抓取部(42)为两个且对称设置,在两个所述抓取部(42)靠近或远离的过程中实现对所述底壳(5)的抓取或释放。
7.根据权利要求1所述的底壳自动翻转工装,其特征在于,所述纵向运动组件(2)包括纵向驱动部(21)和用于对所述连接板(12)的运动进行导向的纵向导向部(22),所述纵向导向部(22)包括:
8.根据权利要求1所述的底壳自动翻转工装,其特征在于,还包括用于感应所述底壳(5)位置的位置传感器,所述位置传感器连接于所述支撑架(11)。
9.根据权利要求1所述的底壳自动翻转工装,其特征在于,还包括控制器(6),所述控制器(6)连接于所述纵向运动组件(2)、水平运动组件(3)、旋转抓取组件(4)和位置传感器。
10.一种底壳生产线,其特征在于,包括如权利要求1-8任一项所述的底壳自动翻转工装。
技术总结
本技术提供了一种底壳自动翻转工装及底壳生产线,涉及自动化加工领域。该底壳自动翻转工装包括支撑组件、纵向运动组件、水平运动组件和旋转抓取组件,支撑组件包括支撑架和连接板,水平运动组件包括水平驱动部,纵向运动组件的连接于支撑架和连接板之间,水平运动组件连接于连接板远离纵向运动组件的一侧,并在纵向运动组件的驱动下做升降运动,旋转抓取组件的一端连接于水平驱动部的驱动端,旋转抓取组件的另一端可夹取并驱动底壳进行旋转;其中,纵向运动组件和水平驱动部可驱动旋转抓取组件靠近或远离底壳,以便于旋转抓取组件夹取或释放底壳。本技术能高效、快速地将底壳进行翻转,提高生产效率。
技术研发人员:任健聪,麦均叨,麦志峰,潘叶江
受保护的技术使用者:华帝股份有限公司
技术研发日:20231128
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!