一种自动剪带拆带机器人中的剪带机构的制作方法
本技术涉及包装处理装置,具体是一种自动剪带拆带机器人中的剪带机构。
背景技术:
1、包装为在流通过程中保护产品,方便储运,促进销售,按一定的技术方法所用的容器、材料和辅助物等的总体名称;也指为达到上述目的在采用容器,材料和辅助物的过程中施加一定技术方法等的操作活动,承装没有进入流通领域物品的用品不能称之为包装,只能称为包裹、箱子、容器等,因为包装除了有包裹盒承装的功能外,对物品进行修饰,获得受众的青睐才是包装的重要作用。
2、在食品包装以及日化品包装行业中,纸板是装箱码垛的主流方式,而纸板在生产完成后都会使用扎带包扎成捆使纸板规整,而在之后的生产环节中,又需要将纸板包的扎带剪断供开箱机加工成上端开口的箱体,因此需要用到剪带拆带机器人,虽然现有的包装处理装置技术具备操作简单的特点,但是现有纸板包大多是由人工进行搬运并剪断所有扎带后放置在开箱机上,整个过程费时费力,造成工人的工作强度高、生产线的流畅度低等问题,使得生产效率降低的问题。
3、因此,本领域技术人员提供了一种自动剪带拆带机器人中的剪带机构,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型要解决的技术问题是:现有技术中存在自动化程度低的缺点,为此我们提出一种自动剪带拆带机器人中的剪带机构。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种自动剪带拆带机器人中的剪带机构,包括底板、连接块和伺服电机,所述连接块的底部设置有剪带装置,所述剪带装置包括固定箱;
4、所述固定箱的内侧均固定连接有第一滑杆,所述第一滑杆的表面均活动连接有第一电动滑套,所述第一电动滑套的底部固定连接有限位板,所述限位板内腔的顶部均固定连接有第二伸缩杆,所述限位板的内腔活动连接有移动板,所述移动板的顶部固定连接于第二伸缩杆的底部,所述固定箱的底部开设有滑槽,所述滑槽的内腔固定连接有第二滑杆,所述第二滑杆的表面滑动连接有第二电动滑套,所述第二电动滑套的底部均固定连接有第一伸缩杆,所述第一伸缩杆的底部固定连接有第一伸缩杆,所述第一伸缩杆的底部固定连接有固定板,所述固定板的内腔固定连接有刀片。
5、作为本实用新型再进一步地方案:所述底板的顶部固定连接有第一液压杆,所述第一液压杆的顶部开设有固定槽。
6、作为本实用新型再进一步地方案:所述固定槽的内腔活动连接有转动模块,所述转动模块的表面活动连接有固定臂。
7、作为本实用新型再进一步地方案:所述固定臂的左侧开设有滑动槽,所述滑动槽的内腔活动连接有移动臂。
8、作为本实用新型再进一步地方案:所述滑动槽内腔的右侧固定连接有第二液压杆,所述第二液压杆的左侧固定连接于移动臂的右侧。
9、作为本实用新型再进一步地方案:所述移动臂顶部的左侧活动连接有防护盖,所述防护盖的顶部固定连接有把手。
10、作为本实用新型再进一步地方案:所述连接块的顶部固定连接有从动齿轮,所述伺服电机的输出端固定连接有传动齿轮,所述伺服电机的外侧固定连接有固定罩,所述固定罩底部的设置均通过螺丝固定连接于移动臂的内侧,所述传动齿轮的底部啮合连接于从动齿轮的表面。
11、本实用新型的有益效果是:
12、1、本实用新型通过第一电动滑套的移动可将纸板夹持于移动板的内侧,此时通过第一伸缩杆带动固定板和刀片向下移动,同时通过第二电动滑套带动刀片向前移动,将纸板绑带切断,解决了因需要人工搬运并剪断所有扎带后放置在开箱机上,造成整个过程费时费力,使得生产效率降低的问题。
13、2、本实用新型通过设置第一液压杆,可以通过第一液压杆的伸缩,最终带动剪带装置进行移动,从而对不同高度的纸板进行夹持,通过设置转动模块,可以带动固定臂进行移动,从而对不同角度的纸板进行夹持,通过设置滑动槽和移动臂,可以使移动臂进行延伸,从而对远处的纸板进行夹持,通过设置第二液压杆,可以为移动臂的移动提供动力。
技术特征:
1.一种自动剪带拆带机器人中的剪带机构,包括底板(1)、连接块(8)和伺服电机(12),其特征在于:所述连接块(8)的底部设置有剪带装置(9),所述剪带装置(9)包括固定箱(901);
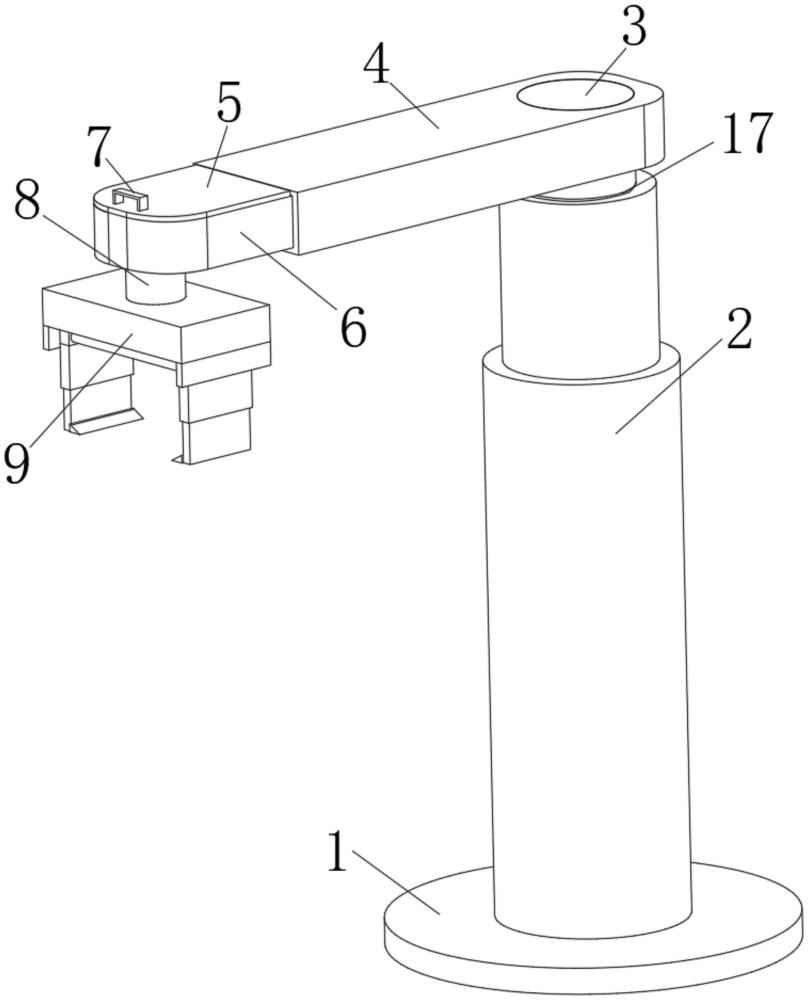
2.根据权利要求1所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述底板(1)的顶部固定连接有第一液压杆(2),所述第一液压杆(2)的顶部开设有固定槽(17)。
3.根据权利要求2所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述固定槽(17)的内腔活动连接有转动模块(3),所述转动模块(3)的表面活动连接有固定臂(4)。
4.根据权利要求3所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述固定臂(4)的左侧开设有滑动槽(16),所述滑动槽(16)的内腔活动连接有移动臂(6)。
5.根据权利要求4所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述滑动槽(16)内腔的右侧固定连接有第二液压杆(15),所述第二液压杆(15)的左侧固定连接于移动臂(6)的右侧。
6.根据权利要求4所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述移动臂(6)顶部的左侧活动连接有防护盖(5),所述防护盖(5)的顶部固定连接有把手(7)。
7.根据权利要求1所述的一种自动剪带拆带机器人中的剪带机构,其特征在于:所述连接块(8)的顶部固定连接有从动齿轮(14),所述伺服电机(12)的输出端固定连接有传动齿轮(13),所述伺服电机(12)的外侧固定连接有固定罩(10),所述固定罩(10)底部的设置均通过螺丝(11)固定连接于移动臂(6)的内侧,所述传动齿轮(13)的底部啮合连接于从动齿轮(14)的表面。
技术总结
本技术涉及包装处理装置技术领域,具体为一种自动剪带拆带机器人中的剪带机构,包括底板、连接块和伺服电机,所述连接块的底部设置有剪带装置,所述剪带装置包括固定箱;所述固定箱的内侧均固定连接有第一滑杆,所述第一滑杆的表面均活动连接有第一电动滑套,所述第一电动滑套的底部固定连接有限位板。该自动剪带拆带机器人中的剪带机构,通过第一电动滑套的移动可将纸板夹持于移动板的内侧,此时通过第一伸缩杆带动固定板和刀片向下移动,同时通过第二电动滑套带动刀片向前移动,将纸板绑带切断解决了因需要人工搬运并剪断所有扎带后放置在开箱机上,造成整个过程费时费力,使得生产效率降低的问题。
技术研发人员:朱敏舟
受保护的技术使用者:江苏中能赛创智能装备科技有限公司
技术研发日:20231129
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!