一种固体粉末下料用具备收集废料功能的机器人的制作方法
本技术涉及固体粉末加工,具体是一种固体粉末下料用具备收集废料功能的机器人。
背景技术:
1、固体颗粒的集合体为粉体,是由许许多多小颗粒物质组成的集合体,其共同的特征是,具有许多不连续的面,比表面积大,由许多小颗粒物质组成,在工业化生产的过程中经常会需要用到固体粉末原料。
2、对固体粉末原料进行加工的过程中容易出现物料洒落的情况,虽然现有的废料收集设备具备对洒落的原料进行防护收集的功能,但是大部分的传统的废料收集设备固定在出料口旁边,将下料口围住防止物料洒落,如果物料掉落到地面上,就没办法对其进行收集,需要人工进行收集从而增加了人们的体力劳动。
3、因此,本领域技术人员提供了一种固体粉末下料用具备收集废料功能的机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种固体粉末下料用具备收集废料功能的机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种固体粉末下料用具备收集废料功能的机器人,包括底板,所述底板的顶部安装有集料机构,所述集料机构包括防护壳,所述防护壳内腔顶部的中端固定安装有第三伺服电机,所述第三伺服电机的输出端固定连接有转动框,所述转动框上端的内表面转动连接有收纳罐,所述转动框正面的上端固定安装有第一伺服电机,所述第一伺服电机的输出端与收纳罐固定连接,所述收纳罐左侧得的中端固定安装有进气风机;
4、所述收纳罐左侧的上端固定连接有连接板,所述连接板底部的左侧固定安装有第二伺服电机,所述第二伺服电机的输出端固定连接有主动齿轮,所述连接板顶部的左侧转动连接有从动齿轮,且从动齿轮与主动齿轮啮合,所述主动齿轮与从动齿轮的外侧设置有齿框,所述齿框的左侧固定连接有载板,所述载板的顶部固定安装有第四伺服电机,所述第四伺服电机的输出端固定连接有螺纹杆,所述螺纹杆外表面的上端螺纹连接有螺纹套,所述螺纹套的左侧固定连接有连接杆,所述连接杆的底部固定连接有壳体,所述壳体的顶部设置有软管,且软管的右端与进气风机连通。
5、作为本实用新型再进一步的方案:所述载板的左侧开设有限位槽,且螺纹套与连接杆的连接处置于限位槽的内表面。
6、作为本实用新型再进一步的方案:所述连接板前后两端的内表面均开设有滑槽,且滑槽内腔的右侧均设置有限位块,且限位块的顶部与齿框固定连接。
7、作为本实用新型再进一步的方案:所述收纳罐顶部的中端开设有排气口,所述排气口的内表面设置有滤网。
8、作为本实用新型再进一步的方案:所述底板顶部的左侧固定连接有蓄电池,且蓄电池正面的中端开设有充电孔。
9、作为本实用新型再进一步的方案:所述收纳罐的右侧活动连接有活动挡板,所述活动挡板右侧的下端设置有配重块。
10、作为本实用新型再进一步的方案:所述底板顶部的右侧固定连接有推杆,所述底板底部的四角均设置有万向轮。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过第三伺服电机的输出端带动转动框转动调节,可以实现收纳罐水平转动调节,通过第二伺服电机的输出端带动主动齿轮转动,实现齿框左右运动调节,延伸载板的长度,再通过第四伺服电机的输出端带动螺纹杆转动,使壳体上下运动,使壳体的底部与地面接触,开启进气风机后,粉末通过软管被吸入收纳罐的内腔,空气通过排气口排出,粉末留在收纳罐的内腔,并且当收纳罐内腔的物料积累到一定量后,开启第一伺服电机工作,可以使收纳罐转动倾斜,活动挡板自动打开倒出物料。
13、2、本实用新型通过设置限位槽,当螺纹套上下运动时,螺纹套与连接杆的连接处在限位槽的内表面上下运动,起到限位的目的,通过设置滑槽和限位块,滑槽对限位块起到了限位的效果。
技术特征:
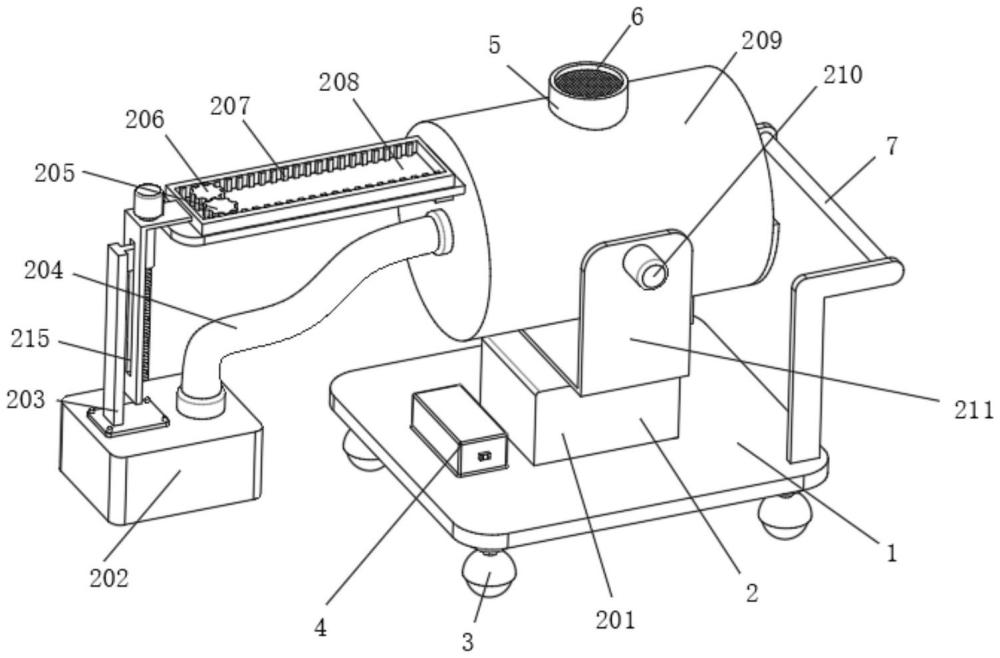
1.一种固体粉末下料用具备收集废料功能的机器人,包括底板(1),其特征在于:所述底板(1)的顶部安装有集料机构(2),所述集料机构(2)包括防护壳(201),所述防护壳(201)内腔顶部的中端固定安装有第三伺服电机(214),所述第三伺服电机(214)的输出端固定连接有转动框(211),所述转动框(211)上端的内表面转动连接有收纳罐(209),所述转动框(211)正面的上端固定安装有第一伺服电机(210),所述第一伺服电机(210)的输出端与收纳罐(209)固定连接,所述收纳罐(209)左侧得的中端固定安装有进气风机(222);
2.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述载板(217)的左侧开设有限位槽(215),且螺纹套(219)与连接杆(203)的连接处置于限位槽(215)的内表面。
3.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述连接板(208)前后两端的内表面均开设有滑槽(212),且滑槽(212)内腔的右侧均设置有限位块(216),且限位块(216)的顶部与齿框(207)固定连接。
4.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述收纳罐(209)顶部的中端开设有排气口(5),所述排气口(5)的内表面设置有滤网(6)。
5.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述底板(1)顶部的左侧固定连接有蓄电池(4),且蓄电池(4)正面的中端开设有充电孔。
6.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述收纳罐(209)的右侧活动连接有活动挡板(221),所述活动挡板(221)右侧的下端设置有配重块。
7.根据权利要求1所述的一种固体粉末下料用具备收集废料功能的机器人,其特征在于:所述底板(1)顶部的右侧固定连接有推杆(7),所述底板(1)底部的四角均设置有万向轮(3)。
技术总结
本技术涉及固体粉末加工技术领域,且公开了一种固体粉末下料用具备收集废料功能的机器人,包括底板,所述底板的顶部安装有集料机构,所述集料机构包括防护壳,所述防护壳内腔顶部的中端固定安装有第三伺服电机,所述第三伺服电机的输出端固定连接有转动框。通过第三伺服电机的输出端带动转动框转动调节,可以实现收纳罐水平转动调节,通过第二伺服电机的输出端带动主动齿轮转动,实现齿框左右运动调节,粉末通过软管被吸入收纳罐的内腔,空气通过排气口排出,粉末留在收纳罐的内腔,并且当收纳罐内腔的物料积累到一定量后,开启第一伺服电机工作,可以使收纳罐转动倾斜,活动挡板自动打开倒出物料。
技术研发人员:陈杰
受保护的技术使用者:苏州蓝柯新能源科技有限公司
技术研发日:20231129
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!