一种新能源模组和栈板的搬运夹具的制作方法
本技术涉及电芯加工辅助设备,具体涉及一种新能源模组和栈板的搬运夹具。
背景技术:
1、电芯模组是储能系统中至关重要的组成部分,是将多个电芯组合在一起形成一个整体,以提高储能系统的效率和安全性,电芯的质量直接决定了充电电池的质量,然而,在将多个电芯组合加工成电芯模组时,为了方便电芯模组的运输,需要将加工完成的电芯模组放置在栈板上,先由机器人通过搬运夹具将电芯模组搬运至输送线上,再由输送线将电芯模组输送至pack产线进行加工。
2、但是,由于每个栈板可放置两个电芯模组,每五个栈板堆积成一组,在将电芯模组放置在栈板上时,需要使用两台机器人分别通过模组搬运夹具和栈板搬运夹具才能对电芯模组、栈板进行搬运,采用此方法搬运电芯模组、栈板,不仅会让机器人在产线上占用较多的空间,还会增加设备成本。因此,本领域技术人员提供了一种新能源模组和栈板的搬运夹具,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种新能源模组和栈板的搬运夹具,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种新能源模组和栈板的搬运夹具,包括:模组固定框和栈板固定框,模组固定框垂直安装在栈板固定框的一侧,其中,模组固定框的端面滑动安装有呈对称分布的两个侧板夹爪,并且,模组固定框的端面与侧板夹爪的两端对应的位置处均设置有第一夹紧气缸,第一夹紧气缸的输出端设置有伸出杆,伸出杆远离第一夹紧气缸的一端安装在侧板夹爪的内侧,侧板夹爪能够通过伸出杆的推动在模组固定框的端面滑动,且模组固定框的端面位于侧板夹爪的两侧均设置有端板夹爪,其中一个端板夹爪固定在模组固定框的一端,模组固定框的背部与另一个端板夹爪对应的位置处滑动安装有第一滑座,另一个端板夹爪贯穿于模组固定框安装在第一滑座的两端,模组固定框的背部设置有用于驱动第一滑座位移的第二夹紧气缸,栈板固定框的端面设置有呈对称分布的两个栈板夹爪,并且,其中一个栈板夹爪固定在栈板固定框的一端,栈板固定框的背部与另一个栈板夹爪对应的位置处滑动安装有第二滑座,另一个栈板夹爪贯穿于栈板固定框安装在第二滑座的两端,栈板固定框的背部设置有用于驱动第二滑座位移的第三夹紧气缸,且两个栈板夹爪的内侧均设置有反推气缸,反推气缸的输出端设置有推杆,推杆的另一端设置有推板,栈板夹爪的内侧位于推板的下方设置有用于限定栈板位置的防坠胶块。
4、优选地,侧板夹爪的两端均设置有滑块,模组固定框的端面与两个滑块对应的位置处均设置有第二滑轨,两个滑块分别滑动安装在两个第二滑轨的外壁。
5、优选地,模组固定框的背部设置有呈对称分布的两个第一滑轨,第一滑座的两端分别滑动在第一滑轨的外壁。
6、优选地,侧板夹爪、端板夹爪的内侧分别设置有用于与模组接触的接触块、摩擦块,并且,接触块、摩擦块的材质均为聚氨酯。
7、优选地,两个侧板夹爪上的第一夹紧气缸均为同一电磁阀控制。
8、优选地,栈板固定框的背部设置有呈对称分布的两个第三滑轨,第二滑座的两端分别滑动在两个第三滑轨的外壁。
9、优选地,模组固定框的背部和栈板固定框的背部之间倾斜设置有固定座,固定座的端面设置有连接轴,固定座通过连接轴安装在机械臂上。
10、与现有技术相比,本实用新型的优点在于:
11、通过将模组固定框和栈板固定框组合成一个整体的搬运夹具,在对电芯模组和栈板进行搬运时,可先将模组固定框垂直在电芯模组的上方,并通过机器人将侧板夹爪和端板夹爪移动至电芯模组的四周,再通过驱动第二夹紧气缸工作,驱动安装在其输出端的第一滑座在模组固定框的背部进行位移,并带动安装在第一滑座上的端板夹爪进行位移,让两个端板夹爪夹持在电芯模组的两端对其限位,再通过驱动第一夹紧气缸工作带动安装在其输出端的伸出杆收缩,并带动固定在伸出杆上的侧板夹爪通过滑块和第二滑轨的配合向模组固定框的中间位置处滑动,让两个侧板夹爪夹持在电芯模组的两侧,以此完成了对电芯模组的抓取,可将电芯模组放置栈板上进行输送,并且,在将栈板上电芯模组摆放完成后,可通过机器人控制搬运夹具旋转,将栈板固定框垂直在空栈板的上方,并将两个栈板夹爪移动至空栈板的两侧,再通过驱动第三夹紧气缸工作,驱动安装在其输出端的第二滑座在栈板固定框的背部位移,并带动固定在第二滑座上的栈板夹爪进行位移,让两个栈板夹爪夹持在栈板的两端,由防坠胶块对空栈板进行举托,再通过驱动反推气缸工作,带动安装在其输出端的推杆伸出,并带动安装在推杆上的推板向下位移,让推板将空栈板压紧在防坠胶块上,即可完成对空栈板的抓取,可将空栈板堆叠在装有电芯模组的栈板的上方承载其它电芯模组,能够将搬运电芯模组和栈板的夹具组合成一个整体的搬运夹具,并通过一个机器人控制搬运夹具对电芯模组、栈板进行抓取、搬运,避免了需要使用两个机器人分别控制两个夹具才能对栈板、电芯模组进行搬运的情况发生,缩小了搬运机器人的占地空间,减少了设备的成本,实用性强。
技术特征:
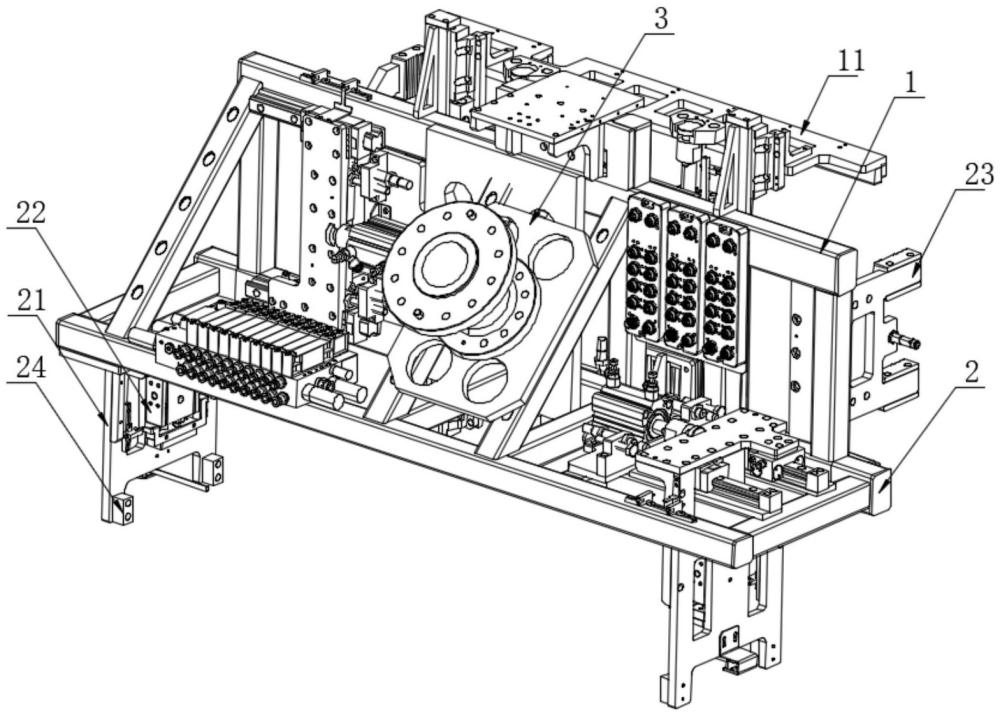
1.一种新能源模组和栈板的搬运夹具,包括:模组固定框(1)和栈板固定框(2),其特征在于,所述模组固定框(1)垂直安装在所述栈板固定框(2)的一侧,其中,所述模组固定框(1)的端面滑动安装有呈对称分布的两个侧板夹爪(11),并且,所述模组固定框(1)的端面与所述侧板夹爪(11)的两端对应的位置处均设置有第一夹紧气缸(12),所述第一夹紧气缸(12)的输出端设置有伸出杆,所述伸出杆远离所述第一夹紧气缸(12)的一端安装在所述侧板夹爪(11)的内侧,所述侧板夹爪(11)能够通过所述伸出杆的推动在所述模组固定框(1)的端面滑动,且所述模组固定框(1)的端面位于所述侧板夹爪(11)的两侧均设置有端板夹爪(13),其中一个所述端板夹爪(13)固定在所述模组固定框(1)的一端,所述模组固定框(1)的背部与另一个所述端板夹爪(13)对应的位置处滑动安装有第一滑座(14),另一个所述端板夹爪(13)贯穿于所述模组固定框(1)安装在所述第一滑座(14)的两端,所述模组固定框(1)的背部设置有用于驱动所述第一滑座(14)位移的第二夹紧气缸(15),所述栈板固定框(2)的端面设置有呈对称分布的两个栈板夹爪(21),并且,其中一个所述栈板夹爪(21)固定在所述栈板固定框(2)的一端,所述栈板固定框(2)的背部与另一个所述栈板夹爪(21)对应的位置处滑动安装有第二滑座(25),另一个所述栈板夹爪(21)贯穿于所述栈板固定框(2)安装在所述第二滑座(25)的两端,所述栈板固定框(2)的背部设置有用于驱动所述第二滑座(25)位移的第三夹紧气缸(26),且两个所述栈板夹爪(21)的内侧均设置有反推气缸(22),所述反推气缸(22)的输出端设置有推杆,所述推杆的另一端设置有推板(23),所述栈板夹爪(21)的内侧位于所述推板(23)的下方设置有用于限定栈板位置的防坠胶块(24)。
2.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,所述侧板夹爪(11)的两端均设置有滑块(17),所述模组固定框(1)的端面与两个所述滑块(17)对应的位置处均设置有第二滑轨(18),两个所述滑块(17)分别滑动安装在两个所述第二滑轨(18)的外壁。
3.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,所述模组固定框(1)的背部设置有呈对称分布的两个第一滑轨(16),所述第一滑座(14)的两端分别滑动在所述第一滑轨(16)的外壁。
4.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,所述侧板夹爪(11)、端板夹爪(13)的内侧分别设置有用于与模组接触的接触块(111)、摩擦块(131),并且,所述接触块(111)、摩擦块(131)的材质均为聚氨酯。
5.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,两个所述侧板夹爪(11)上的所述第一夹紧气缸(12)均为同一电磁阀控制。
6.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,所述栈板固定框(2)的背部设置有呈对称分布的两个第三滑轨(27),所述第二滑座(25)的两端分别滑动在两个所述第三滑轨(27)的外壁。
7.根据权利要求1所述的一种新能源模组和栈板的搬运夹具,其特征在于,所述模组固定框(1)的背部和所述栈板固定框(2)的背部之间倾斜设置有固定座(3),所述固定座(3)的端面设置有连接轴,所述固定座(3)通过所述连接轴安装在机械臂上。
技术总结
本申请公开了一种新能源模组和栈板的搬运夹具,其包括:模组固定框和栈板固定框,模组固定框垂直安装在栈板固定框的一侧,其中,模组固定框的端面滑动安装有呈对称分布的两个侧板夹爪,并且,模组固定框的端面与侧板夹爪的两端对应的位置处均设置有第一夹紧气缸,第一夹紧气缸的输出端设置有伸出杆,伸出杆远离第一夹紧气缸的一端安装在侧板夹爪的内侧。本申请公开的搬运夹具能够将搬运电芯模组和栈板的夹具组合成一个整体的搬运夹具,并通过一个机器人控制搬运夹具对电芯模组、栈板进行抓取、搬运,避免了需要使用两个机器人分别控制两个夹具才能对栈板、电芯模组搬运的情况发生,缩小了搬运机器人的占地空间,减少了设备的成本,实用性强。
技术研发人员:陈志浩,丁正兵,曹中成,杨晓恒,王峰,丁琛,奥斯曼,吴衡,杨洋
受保护的技术使用者:上汽时代动力电池系统有限公司
技术研发日:20231221
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!