一种保温板贴合自动化生产线的机器人搬运装置的制作方法
本技术属于物料运输设备,具体涉及一种保温板贴合自动化生产线的机器人搬运装置。
背景技术:
1、保温隔热板包括了保温板和石棉板,保温板和石棉板之间通过涂胶进行贴合,目前市面上没有专门的装置及设备来对叠放好的石棉板进行分离及运输,仍然为人工操作,生产效率偏低。
技术实现思路
1、为了克服现有技术的上述缺点,本实用新型的目的是提供一种保温板贴合自动化生产线的机器人搬运装置。
2、本实用新型解决其技术问题所采用的技术方案是:
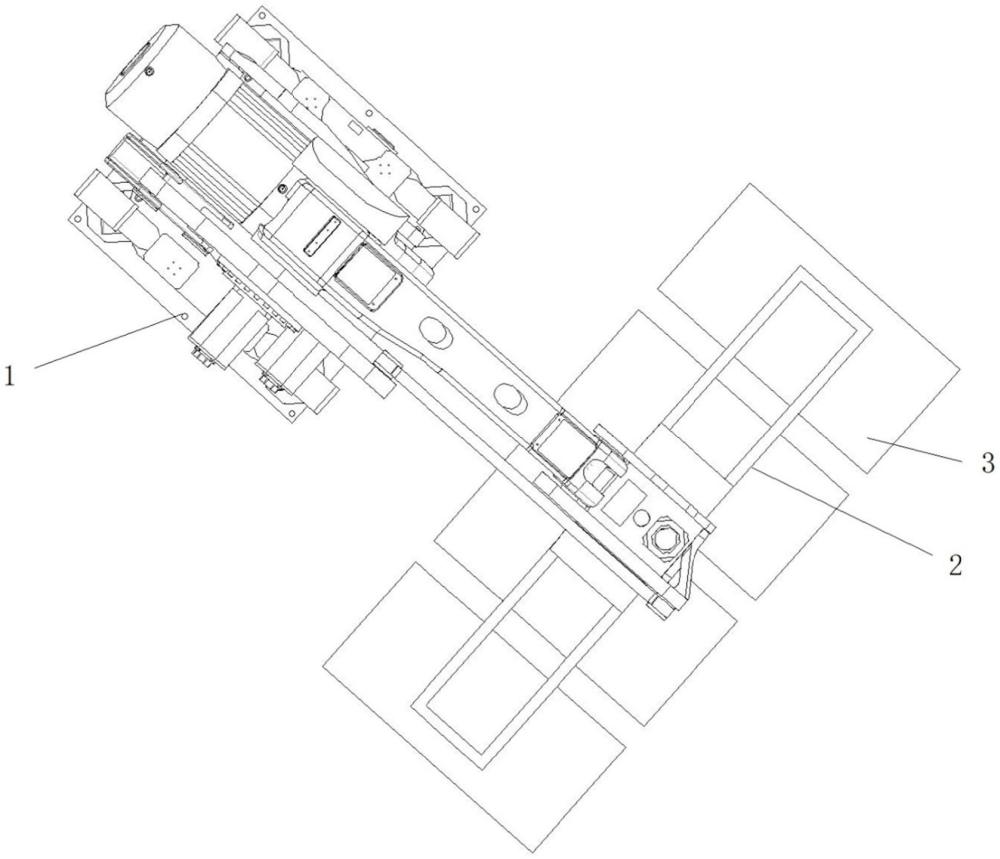
3、一种保温板贴合自动化生产线的机器人搬运装置,包括搬运机器人和吸盘组件,所述吸盘组件与所述搬运机器人的运动端部连接;
4、所述吸盘组件包括吸盘架体、真空吸盘件、伸缩滚筒机构以及升降夹机构;
5、所述真空吸盘件、伸缩滚筒机构以及升降夹机构均设于所述吸盘架体,所述伸缩滚筒机构具有可相对所述吸盘架体的底部伸缩移动的伸缩滚筒部,所述升降夹机构具有可相对所述吸盘架体的顶部升降移动的升降夹体部。
6、优选的,所述真空吸盘件的数量为两个以上并平行均布于所述吸盘架体的底部;
7、所述伸缩滚筒机构设置相邻的所述真空吸盘件之间。
8、优选的,所述伸缩滚筒机构包括伸缩驱动装置,所述伸缩驱动装置的驱动端设有滚筒件,所述滚筒件与所述伸缩驱动装置的驱动端形成所述伸缩滚筒部。
9、优选的,所述升降夹机构包括升降驱动装置,所述升降驱动装置的驱动端设有夹板,所述夹板与所述升降驱动装置的驱动端形成所述升降夹体部;
10、所述夹板的形状为l型。
11、优选的,所述升降驱动装置设于所述吸盘架体的顶部的长边处,所述夹板的弯折端处于所述吸盘架体的长边处的外侧。
12、优选的,所述升降夹机构还包括摆动驱动装置,所述摆动驱动装置设于所述吸盘架体的顶部的长边处,所述摆动驱动装置的驱动端与所述升降驱动装置连接。
13、优选的,所述真空吸盘件包括吸盘体,所述吸盘体上设有与外置的抽真空装置连通的通孔。
14、优选的,还包括海绵体,所述海绵体设于所述吸盘体的底部。
15、优选的,所述吸盘体的底部设有若干用于在所述海绵体处形成负压的负压孔。
16、优选的,所述搬运机器人为多轴机器人。
17、与现有技术相比,本实用新型的有益效果包括有:
18、本申请的机器人搬运装置便于将叠放状态的石棉板,从上至下依次分料取出,整体为自动化操作,减少人工参与,提升石棉板搬运的效率。
技术特征:
1.一种保温板贴合自动化生产线的机器人搬运装置,其特征在于,包括搬运机器人和吸盘组件,所述吸盘组件与所述搬运机器人的运动端部连接;
2.根据权利要求1所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述真空吸盘件的数量为两个以上并平行均布于所述吸盘架体的底部;
3.根据权利要求2所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述伸缩滚筒机构包括伸缩驱动装置,所述伸缩驱动装置的驱动端设有滚筒件,所述滚筒件与所述伸缩驱动装置的驱动端形成所述伸缩滚筒部。
4.根据权利要求1所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述升降夹机构包括升降驱动装置,所述升降驱动装置的驱动端设有夹板,所述夹板与所述升降驱动装置的驱动端形成所述升降夹体部;
5.根据权利要求4所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述升降驱动装置设于所述吸盘架体的顶部的长边处,所述夹板的弯折端处于所述吸盘架体的长边处的外侧。
6.根据权利要求5所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述升降夹机构还包括摆动驱动装置,所述摆动驱动装置设于所述吸盘架体的顶部的长边处,所述摆动驱动装置的驱动端与所述升降驱动装置连接。
7.根据权利要求1所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述真空吸盘件包括吸盘体,所述吸盘体上设有与外置的抽真空装置连通的通孔。
8.根据权利要求7所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,还包括海绵体,所述海绵体设于所述吸盘体的底部。
9.根据权利要求8所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述吸盘体的底部设有若干用于在所述海绵体处形成负压的负压孔。
10.根据权利要求1所述的保温板贴合自动化生产线的机器人搬运装置,其特征在于,所述搬运机器人为多轴机器人。
技术总结
本技术属于物料运输设备技术领域,提供一种保温板贴合自动化生产线的机器人搬运装置,包括搬运机器人和吸盘组件,所述吸盘组件与所述搬运机器人的运动端部连接;所述吸盘组件包括吸盘架体、真空吸盘件、伸缩滚筒机构以及升降夹机构;所述真空吸盘件、伸缩滚筒机构以及升降夹机构均设于所述吸盘架体,所述伸缩滚筒机构具有可相对所述吸盘架体的底部伸缩移动的伸缩滚筒部,所述升降夹机构具有可相对所述吸盘架体的顶部升降移动的升降夹体部。本申请便于将叠放状态的石棉板,从上至下依次分料取出,整体为自动化操作,减少人工参与,提升石棉板搬运的效率。
技术研发人员:崔顺炬,刘俭峰,陈宣颖,陈余刚,梁俊杰,刘海涛
受保护的技术使用者:广东省机器人创新中心有限公司
技术研发日:20231221
技术公布日:2024/8/1
- 还没有人留言评论。精彩留言会获得点赞!