一种搬运抓手的制作方法
本技术涉及一种搬运装置,尤其涉及一种搬运抓手。
背景技术:
1、在工业生产中,当需要对工件搬运移送时,一般通过真空吸附的方式将工件吸附定位,而在对工件移送过程中还需要进一步加工时,为了防止工件在加工过程中发生偏移,会在吸附工件时,将定位销同时穿过工件,从而提高对工件吸附时的稳定性。然而在实际工作中,当工件摆放位置不准确时,工件上供定位销穿过的孔位未能正对于定位销,此时如直接吸附工件,定位销会对工件表面刮花,从而影响工件的质量,因此,亟需一种可对工件进行稳定吸附定位时减少对工件伤害的搬运抓手。
技术实现思路
1、本实用新型目的在于提供一种搬运抓手,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本实用新型解决其技术问题的解决方案是:
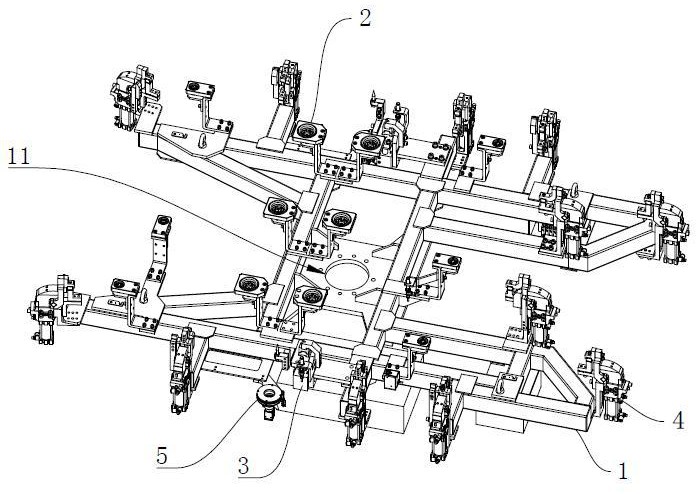
3、一种搬运抓手,包括:机架;吸附定位组件,其包括多个连接于所述机架上的吸附单元,多个所述吸附单元分别具有朝上设置的吸附端,多个所述吸附端共同形成吸附区;感应定位组件,其包括设置于机架上的感应头与定位销,所述感应头位于所述吸附区的下方,所述定位销可向上活动进入所述吸附区或向下活动退出所述吸附区;夹紧定位组件,其包括多个连接于所述机架上的夹紧单元,多个所述夹紧单元分别具有在所述吸附区开合的夹紧空间。
4、该技术方案至少具有如下的有益效果:需要搬运移送的工件中转至吸附区上,先由多个吸附端共同对工件承托定位,此时工件上的孔位正对于感应定位组件的定位销,而定位销为向下退出吸附区的状态,当感应头检测工件放置到位后,定位销向上活动进入吸附区以插入工件的孔位内,然后多个吸附端再工作将工件吸附定位,接着多个夹紧单元的夹紧空间合拢,将工件进一步夹紧定位,保证对工件加工、搬送过程中的稳定性,如此在放置工件时先检测工件在放置到位后再将定位销插入工件并对其吸附夹紧,可有效避免工件摆放位置不准确时继续定位工件、对工件造成损害的问题,有利于减少产品不良率,提高生产质量。
5、作为上述技术方案的进一步改进,所述感应定位组件包括第一支架、接近开关与升降驱动,所述第一支架连接于所述机架上,所述接近开关与所述升降驱动均连接于所述第一支架上,所述接近开关向上凸出于所述第一支架,所述接近开关的顶端设置有所述感应头,所述升降驱动传动连接所述定位销。接近开关与升降驱动安装固定于第一支架上,而通过对第一支架的固定亦即可将整体安装固定于机架上,使用时,将工件放置,工件可接触接近开关顶端的感应头,从而由接近开关检测到工件放置到位,再由升降驱动带动定位销向上顶出,以插入至工件上预设的孔位内,实现对工件的限位。
6、作为上述技术方案的进一步改进,所述第一支架上连接有限高座,所述限高座的底侧设置有限高槽,所述升降驱动传动连接有止动块,所述升降驱动带动所述定位销向上进入所述吸附区时,所述止动块配合连接于所述限高槽内。当定位销向下退出吸附区时,止动块脱离出限高槽,当定位销向上插入至工件的孔位后,止动块亦配合连接至限高槽,利用限高座可限制升降驱动继续带动定位销上移,从而避免定位销插入过度对工件造成伤害的问题,更好地实现对工件定位并保护。
7、作为上述技术方案的进一步改进,所述机架至少两侧设置有所述吸附定位组件。机架至少两侧的吸附定位组件可提高对工件检测放置到位的准确性,从而更好地对工件进行保护。
8、作为上述技术方案的进一步改进,所述吸附单元包括第二支架、真空吸盘,所述第二支架连接于所述机架上,所述第二支架上连接有安装板,所述真空吸盘连接于所述安装板上,所述真空吸盘形成所述吸附端。真空吸盘安装固定于第二支架上,通过第二支架可方便抬高、调整吸附端的安装位置,以便于真空吸附的吸附端稳定地工作。
9、作为上述技术方案的进一步改进,所述第二支架上位于所述安装板上方的位置连接有托板,所述托板上设置有避让孔,所述吸附端穿过所述避让孔并向上凸出所述托板,所述吸附端可向下弹性形变并进入所述避让孔内。当真空吸盘未工作时,真空吸盘的吸附端向上凸出于托板以对工件进行承托,当真空吸盘工作时,其吸附端产生负压并发生弹性形变,吸附端向下缩入避让孔内,此时由托板对工件承托,有利于保证对工件承托定位的稳定性。
10、作为上述技术方案的进一步改进,所述夹紧单元包括第三支架、下夹块、旋转装置、摆臂与上夹块,所述第三支架连接于所述机架上,所述下夹块与所述旋转装置分别连接于所述第三支架上,所述摆臂的一端转动连接于所述第三支架上,所述上夹块连接于所述摆臂的另一端,所述旋转装置可带动所述摆臂转动并使得所述上夹块靠近或远离所述下夹块,所述上夹块与所述下夹块之间形成所述夹紧空间。在对工件夹紧定位前,上夹块为远离下夹块的状态,此时夹紧空间打开,对工件吸附定位后,工件与下夹块相抵,此时下夹块同样可对工件起到承托的作用,由旋转装置带动摆臂转动,使得上夹块靠近下夹块,上夹块与下夹块之间形成的夹紧空间合拢,将工件夹紧定位。
11、作为上述技术方案的进一步改进,所述机架的中部设置有安装洞口,所述机架上环绕所述安装洞口设置有多个安装孔。外设的结构可配合连接至安装洞口处,以实现与机架的快速配对,然后从多个安装孔处可向机架打入连接件,如螺丝、螺栓等,从而对机架进一步连接固定。
12、作为上述技术方案的进一步改进,所述机架上连接有摄像头。通过摄像头可观察工件放置定位状态,有利于实现自动化视觉检测,提高对工件状态判断的准确性。
技术特征:
1.一种搬运抓手,其特征在于:包括:
2.根据权利要求1所述的一种搬运抓手,其特征在于:所述感应定位组件(3)包括第一支架(33)、接近开关(31)与升降驱动(34),所述第一支架(33)连接于所述机架(1)上,所述接近开关(31)与所述升降驱动(34)均连接于所述第一支架(33)上,所述接近开关(31)向上凸出于所述第一支架(33),所述接近开关(31)的顶端设置有所述感应头(311),所述升降驱动(34)传动连接所述定位销(32)。
3.根据权利要求2所述的一种搬运抓手,其特征在于:所述第一支架(33)上连接有限高座(35),所述限高座(35)的底侧设置有限高槽,所述升降驱动(34)传动连接有止动块(36),所述升降驱动(34)带动所述定位销(32)向上进入所述吸附区时,所述止动块(36)配合连接于所述限高槽内。
4.根据权利要求2所述的一种搬运抓手,其特征在于:所述机架(1)至少两侧设置有所述吸附定位组件。
5.根据权利要求1所述的一种搬运抓手,其特征在于:所述吸附单元(2)包括第二支架(21)、真空吸盘(22),所述第二支架(21)连接于所述机架(1)上,所述第二支架(21)上连接有安装板(211),所述真空吸盘(22)连接于所述安装板(211)上,所述真空吸盘(22)形成所述吸附端。
6.根据权利要求5所述的一种搬运抓手,其特征在于:所述第二支架(21)上位于所述安装板(211)上方的位置连接有托板(212),所述托板(212)上设置有避让孔,所述吸附端穿过所述避让孔并向上凸出所述托板(212),所述吸附端可向下弹性形变并进入所述避让孔内。
7.根据权利要求1所述的一种搬运抓手,其特征在于:所述夹紧单元(4)包括第三支架(41)、下夹块(42)、旋转装置(43)、摆臂(44)与上夹块(45),所述第三支架(41)连接于所述机架(1)上,所述下夹块(42)与所述旋转装置(43)分别连接于所述第三支架(41)上,所述摆臂(44)的一端转动连接于所述第三支架(41)上,所述上夹块(45)连接于所述摆臂(44)的另一端,所述旋转装置(43)可带动所述摆臂(44)转动并使得所述上夹块(45)靠近或远离所述下夹块(42),所述上夹块(45)与所述下夹块(42)之间形成所述夹紧空间。
8.根据权利要求1所述的一种搬运抓手,其特征在于:所述机架(1)的中部设置有安装洞口(11),所述机架(1)上环绕所述安装洞口(11)设置有多个安装孔。
9.根据权利要求1所述的一种搬运抓手,其特征在于:所述机架(1)上连接有摄像头(5)。
技术总结
本技术公开了一种搬运抓手,包括:机架;吸附定位组件,其包括多个连接于所述机架上的吸附单元,多个所述吸附单元分别具有朝上设置的吸附端,多个所述吸附端共同形成吸附区;感应定位组件,其包括设置于机架上的感应头与定位销,所述感应头位于所述吸附区的下方,所述定位销可向上活动进入所述吸附区或向下活动退出所述吸附区;夹紧定位组件,其包括多个连接于所述机架上的夹紧单元,多个所述夹紧单元分别具有在所述吸附区开合的夹紧空间,本技术在放置工件时先检测工件在放置到位后再对其吸附夹紧,可有效避免工件放置位置不准确时继续定位工件、对工件造成损害的问题,有利于减少产品不良率,提高生产质量。
技术研发人员:郑道海,朱成伟,徐刚强,雷国涛
受保护的技术使用者:武汉福迪汽车零部件有限公司
技术研发日:20231230
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!