一种升降旋转式取料机构及取料设备的制作方法
本申请涉及机械化取料,尤其涉及一种升降旋转式取料机构及取料设备。
背景技术:
1、目前常用的升降旋转式取料机构是用丝杆模组的方式升降,在一些特殊的场合并不适合,例如:两个取料平台需要一升一降运动时,通常是采用两组升降机构(丝杆模组)来对应控制取料平台的一升一降,但是单一控制方式导致升降旋转式取料机构的结构复杂以及零部件数量多,导致体积大、空间占用面积大、成本高;且当将所有零部件安装都在一个z轴的丝杆模组上,使得z轴的丝杆模组的负载更重和悬臂更长,很容易造成z轴丝杆模组抖动,导致升降旋转式取料机构工作的稳定性差。
技术实现思路
1、本申请的主要目的在于提供一种升降旋转式取料机构及取料设备,旨在解决现有技术的升降旋转式取料机构的结构复杂、体积大以及成本高的技术问题。
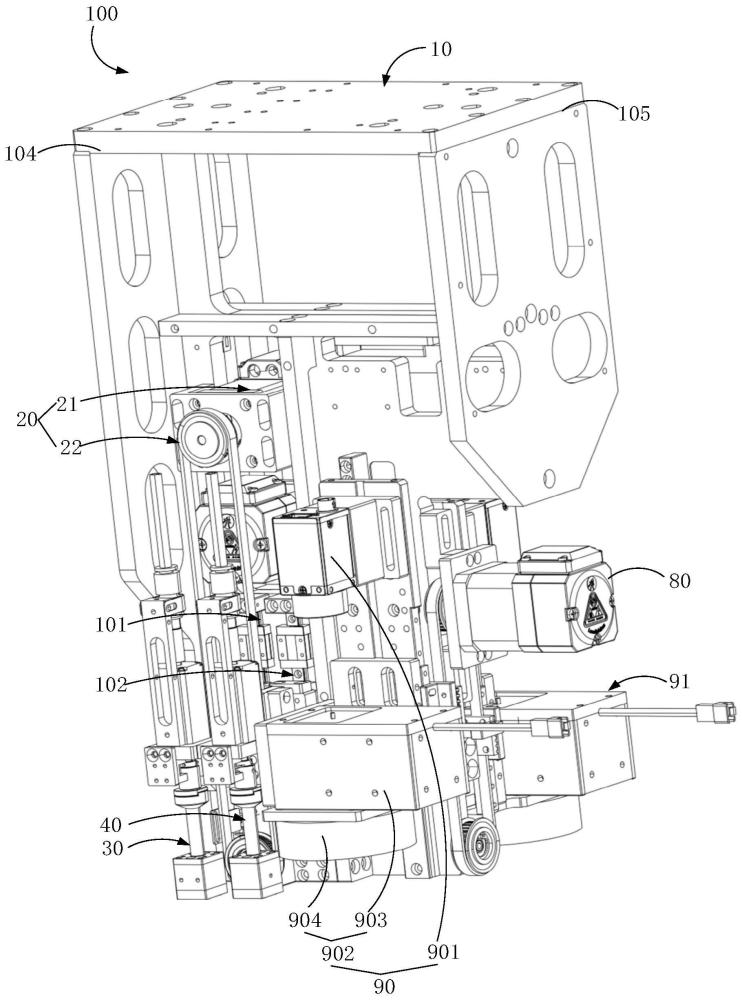
2、为实现上述目的,本申请提供一种升降旋转式取料机构,升降旋转式取料机构包括:
3、固定架;
4、第一驱动机构,所述第一驱动机构设置于所述固定架上,所述第一驱动机构的相对两侧作相背运动;
5、第一真空旋转取料平台,所述第一真空旋转取料平台分别滑动设置于所述固定架和所述第一驱动机构的一侧上;
6、第二真空旋转取料平台,所述第二真空旋转取料平台分别滑动设置于所述固定架上和所述第一驱动机构与所述第一真空旋转取料平台相对的一侧上;
7、所述第一驱动机构同时驱动所述第一真空旋转取料平台和所述第二真空旋转取料平台作相背运动。
8、进一步地,在一实施方式中,所述第一驱动机构包括第一驱动件和第一相背运动组件,所述第一驱动件设置于所述固定架上,所述相背运动组件垂直设置于所述第一驱动件的输出端上,所述第一真空旋转取料平台和所述第二真空旋转取料平台分别滑动设置于所述相背运动组件的相对两侧上,所述第一驱动件用于驱动所述相背运动组件的相对两侧作相背运动,并带动所述第一真空旋转取料平台和所述第二真空旋转取料平台作相背运动。
9、进一步地,在一实施方式中,所述升降旋转式取料机构还包括第二驱动机构、第三真空旋转取料平台和第四真空旋转取料平台,所述第二驱动机构、所述第三真空旋转取料平台和所述第四真空旋转取料平台均位于所述固定架与所述第一真空旋转取料平台背向的一侧,所述第二驱动机构设置于所述固定架上,所述第三真空旋转取料平台和所述第四真空旋转取料平台分别并排滑动设置于所述固定架上和所述第二驱动机构的相对两侧上。
10、进一步地,在一实施方式中,所述升降旋转式取料机构还包括第一视觉定位组件、第二视觉定位组件和第三驱动机构,所述第三驱动机构设置于所述固定架与所述固定架的背向两侧垂直设置的一侧上,所述第一视觉定位组件分别滑动设置于所述固定架和所述第三驱动机构的一侧上,并与所述第一真空旋转取料平台位于所述固定架的同一侧上,所述第二视觉定位组件分别滑动设置于所述固定架和第三驱动机构的相对一侧上,并与所述第三真空旋转取料平台位于所述固定架的同一侧上。
11、进一步地,在一实施方式中,所述第一视觉定位组件的结构和所述第二视觉定位组件的结构为相同结构,所述第一视觉定位组件包括相机镜头和光源,所述相机镜头和所述光源滑动设置于所述固定架上,所述相机镜头与所述光源正对设置。
12、进一步地,在一实施方式中,所述旋转结构包括旋转驱动件和抱紧块,所述旋转驱动件设有第一通孔,所述抱紧块设有第二通孔,所述抱紧块套设于所述旋转驱动件上,所述第一通孔与所述第二通孔贯通。
13、进一步地,在一实施方式中,所述真空结构包括真空吸取平台和连接件,所述真空吸取平台设有至少一个第三通孔,所述连接件设有第四通孔,所述连接件设置于所述真空吸取平台和所述抱紧块上,所述第三通孔、所述第四通孔、所述第二通孔和所述第一通孔依次贯通。
14、进一步地,在一实施方式中,所述真空结构还包括依次连接的转接头、真空接头和与外界真空泵连接的管路,且所述转接头设有第五通孔、所述真空接头设有第六通孔、所述管路设有第七通孔,所述转接头的另一端设置于所述旋转驱动件上,所述第一通孔、所述第五通孔、所述第六通孔和所述第七通孔贯通。
15、本申请还提供一种取料设备,所述取料设备包括:工作台、多轴驱动机构、流水线和述的升降旋转式取料机构,所述流水线和所述多轴驱动机构均设置于所述工作台上,所述升降旋转式取料机构设置于所述多轴驱动机构上。
16、本申请提供的技术方案中,通过将第一驱动机构设置于固定架上,将第一真空旋转取料平台分别滑动设置于所述固定架和所述驱动机构的一侧上;再将第二真空旋转取料平台分别滑动设置于所述固定架上和所述驱动机构与第一真空旋转取料平台相对的一侧上,使得第一驱动机构同时分别驱动第一真空旋转取料平台和第二真空旋转取料平台作相背运动。减少驱动机构的零件,使得升降旋转式取料机构的结构更为紧凑、体积更小、空间占用面积小、降低成本。将大部分零部件固定在固定架上,然后再将第一真空旋转取料平台分别滑动连接于固定架上和第一驱动机构的一侧上,第二真空旋转取料平台分别互动连接于固定架上和第一驱动机构的相对一侧上,使得第一驱动机构可以同时驱动第一真空旋转取料平台和第二真空旋转取料平台做相背运动,因此第一驱动机构实现了z轴的丝杆模组的升降功能,因此本申请的升降旋转式取料机构不需要z轴,避免z轴的丝杆模组工作时产生抖动从而降低升降旋转式取料机构的工作稳定性。
技术特征:
1.一种升降旋转式取料机构,其特征在于,所述升降旋转式取料机构包括:
2.根据权利要求1所述的升降旋转式取料机构,其特征在于,所述第一驱动机构包括第一驱动件和第一相背运动组件,所述第一驱动件设置于所述固定架上,所述第一相背运动组件垂直设置于所述第一驱动件的输出端上,所述第一真空旋转取料平台和所述第二真空旋转取料平台分别滑动设置于所述第一相背运动组件的相对两侧上,所述第一驱动件用于驱动所述第一相背运动组件的相对两侧作相背运动,并带动所述第一真空旋转取料平台和所述第二真空旋转取料平台作相背运动。
3.根据权利要求1所述的升降旋转式取料机构,其特征在于,所述升降旋转式取料机构还包括第二驱动机构、第三真空旋转取料平台和第四真空旋转取料平台,所述第二驱动机构、所述第三真空旋转取料平台和所述第四真空旋转取料平台均位于所述固定架与所述第一真空旋转取料平台背向的一侧,所述第二驱动机构设置于所述固定架上,所述第三真空旋转取料平台和所述第四真空旋转取料平台分别并排滑动设置于所述固定架上和所述第二驱动机构的相对两侧上。
4.根据权利要求1所述的升降旋转式取料机构,其特征在于,所述升降旋转式取料机构还包括第一视觉定位组件、第二视觉定位组件和第三驱动机构,所述第三驱动机构设置于所述固定架与所述固定架的背向两侧垂直设置的一侧上,所述第一视觉定位组件分别滑动设置于所述固定架和所述第三驱动机构的一侧上,并与所述第一真空旋转取料平台位于所述固定架的同一侧上,所述第二视觉定位组件分别滑动设置于所述固定架和第三驱动机构的相对一侧上,并与所述第三真空旋转取料平台位于所述固定架的同一侧上。
5.根据权利要求4所述的升降旋转式取料机构,其特征在于,所述第一视觉定位组件的结构和所述第二视觉定位组件的结构为相同结构,所述第一视觉定位组件包括相机镜头和光源,所述相机镜头和所述光源滑动设置于所述固定架上,所述相机镜头与所述光源正对设置。
6.根据权利要求3所述的升降旋转式取料机构,其特征在于,所述第一真空旋转取料平台、所述第二真空旋转取料平台、所述第三真空旋转取料平台和所述第四真空旋转取料平台为相同结构,所述第一真空旋转取料平台包括旋转结构和真空结构,所述旋转结构滑动设置于所述固定架上,所述旋转结构旋转设置于所述真空结构上,且所述旋转结构与所述真空结构贯通。
7.根据权利要求6所述的升降旋转式取料机构,其特征在于,所述旋转结构包括旋转驱动件和抱紧块,所述旋转驱动件设有第一通孔,所述抱紧块设有第二通孔,所述抱紧块套设于所述旋转驱动件上,所述第一通孔与所述第二通孔贯通。
8.根据权利要求7所述的升降旋转式取料机构,其特征在于,所述真空结构包括真空吸取平台和连接件,所述真空吸取平台设有至少一个第三通孔,所述连接件设有第四通孔,所述连接件设置于所述真空吸取平台和所述抱紧块上,所述第三通孔、所述第四通孔、所述第二通孔和所述第一通孔依次贯通。
9.根据权利要求1所述的升降旋转式取料机构,其特征在于,所述真空结构还包括依次连接的转接头、真空接头和与外界真空泵连接的管路,且所述转接头设有第五通孔、所述真空接头设有第六通孔、所述管路设有第七通孔,所述转接头的另一端设置于所述旋转驱动件上,所述第一通孔、所述第五通孔、所述第六通孔和所述第七通孔贯通。
10.一种取料设备,其特征在于,所述取料设备包括:工作台、多轴驱动机构、流水线和如上述权利要求1-9任一项所述的升降旋转式取料机构,所述流水线和所述多轴驱动机构均设置于所述工作台上,所述升降旋转式取料机构设置于所述多轴驱动机构上。
技术总结
本申请公开了一种升降旋转式取料机构和取料设备。升降旋转式取料机构包括固定架、第一驱动机构、第一真空旋转取料平台和第二真空旋转取料平台;第一驱动机构设置于固定架,第一驱动机构的相对两侧作相背运动;第一真空旋转取料平台分别滑动设置于固定架和第一驱动机构的一侧;第二真空旋转取料平台分别滑动设置于固定架和第一驱动机构与第一真空旋转取料平台相对的一侧;通过第一驱动机构同时驱动第一真空旋转取料平台和第二真空旋转取料平台作相背运动。减少驱动机构的零件,使得升降旋转式取料机构结构更为紧凑、体积更小、降低成本,提高升降旋转式取料机构的工作稳定性。
技术研发人员:邓哲,王家龙
受保护的技术使用者:深圳市腾盛精密装备股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!