聚合物电芯自动弹夹导入托盘设备的制作方法
本发明属于锂离子电池制造,具体涉及一种聚合物电芯自动弹夹导入托盘设备。
背景技术:
1、在大聚合物电芯生产过程中,由于电芯的加工工序很多,电芯在流转至各个工序时,对电芯的载具要求也有所不同,有的工序需要使用弹夹来移栽电芯,有的工序需要使用托盘移栽电芯。现在所使用的方式是人工手动将弹夹内的电池逐支取出来,然后再依次放入所需要的专用托盘内。这种方式生产效率低下,由于是手工取、放料,特别容易造成电池脱落,造成废品,且经常出现混批的现象,手动导入电芯时,也会造成电池外观的磨损,同样造成废品。
技术实现思路
1、本发明的目的在于提供一种聚合物电芯自动弹夹导入托盘设备,以解决背景技术中存在的问题。
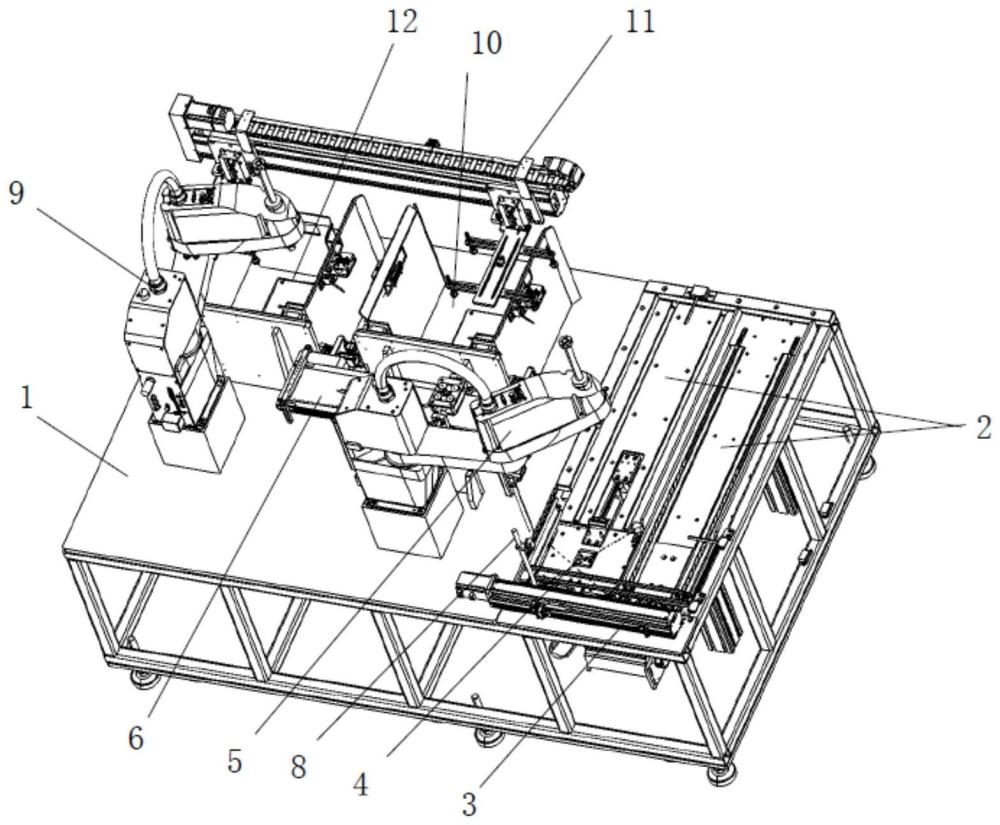
2、为实现上述目的,本发明提供如下技术方案:一种聚合物电芯自动弹夹导入托盘设备,包括基板以及分别安装在基板上的弹夹上下料机构、推挡机构、电芯顶升机构、第一四轴机器人、传动带移栽机构、电池翻转机构、视觉定位机构、第二四轴机器人、空托盘机构、空托盘移送机构和托盘移栽电芯机构;所述弹夹上下料机构用于盛装满载弹夹和将空弹夹移出;所述推挡机构用于将弹夹上下料机构上满载的电池移栽至上料工位,电芯顶升机构位于上料工位底部,用于将电池提升至上料工位;所述第一四轴机器人用于将电芯从电芯顶升机构中取走并放到传动带移栽机构上;所述传动带移栽机构用于传送电芯;所述电池翻转机构安装在传动带移栽机构上,用于将电芯翻转;所述视觉定位机构安装在基板上,用于对电芯拍照分析;所述第二四轴机器人用于将电芯从传动带移栽机构上取下并放到托盘上;所述空托盘机构用于盛装空托盘,所述空托盘移送机构用于将空托盘机构中的空托盘移送到所述托盘移栽电芯机构内;所述托盘移栽电芯机构用于盛放托盘以及电芯。
3、优选地,所述弹夹上下料机构安装在所述基板上,所述弹夹上下料机构包括并行的第一传送带和第二传送带,两个传送带传送方向相反,所述推挡机构安装在第一传送带和第二传送带之间,所述推挡机构包括推挡电机和与其连接的推板,推板将第一传送带上的带有电芯的弹夹推到一侧的第二传送带上。
4、优选地,所述电芯顶升机构安装在第二传送带的下方,所述电芯顶升机构包括顶升电机、顶升块和顶升齿条,所述顶升电机安装在基板的下部,顶升电机驱动带有齿轮,齿轮驱动所述顶升齿条上下移动,所述顶升块固定在所述顶升齿条底部,顶升块用于推动弹夹内的电芯向上移动。
5、优选地,第一四轴机器人安装在所述基板上,其包括四轴机器人,四轴机器人端部固定有吸盘座,吸盘座中部固定有真空吸盘。
6、优选地,所述传送带移栽机构安装在所述基板上并位于所述第一四轴机器人的一侧,所述传送带移栽机构包括由移栽支架、移栽电机和第三传送带,第三传送带安装在移栽支架上,第三传送带由所述移栽电机驱动转动;所述电池翻转机构安装在所述第三传送带上方,所述电池翻转机构包括伺服电机、同步带、同步带轮、翻转支座、翻转盘和翻转吸盘,所述翻转支座为两个,分别固定在移栽支架的两侧,所述翻转盘的两端通过转轴与所述翻转支座连接,所述翻转吸盘为多个,分别安装在所述翻转盘上,所述伺服电机安装在移栽支架的下方,通过同步带和同步带轮驱动所述翻转盘转动。
7、优选地,所述视觉定位机构包括镜头支架、镜头和光源,所述镜头支架固定在基板上并位于第三传送带的一侧,所述镜头和光源分别固定在镜头支架的端部。
8、优选地,所述第二四轴机器人与所述第一四轴机器人的结构相同,第二四轴机器人安装在基板上并位于第三传送带的末端。
9、优选地,所述空托盘机构和托盘移栽电芯机构的结构相同,并列安装在所述基板上,二者分别包括托盘顶升机构和托盘限位导向机构,所述托盘顶升机构位于所述托盘限位导向机构的底部,所述托盘顶升机构包括顶升电机、顶升盘、顶升支架、顶升导杆和顶升齿条,所述顶升支架固定在基板的底部,顶升盘的底部与所述顶升齿条的上部连接,所述顶升盘从基板上的方孔漏出,顶升齿条与齿轮箱内的齿轮啮合,所述齿轮箱的输入端与所述顶升电机的输出端连接,所述顶升电机固定在所述顶升支架上,所述顶升盘的底部设有两根与顶升支架上导套滑动连接的所述导杆;所述托盘限位导向机构包括导向伺服电机、丝杠、侧板和两个夹板,所述导向伺服电机安装在所述基板上,所述伺服电机与所述丝杠连接,所述丝杠的两端通过连接座与所述侧板连接,所述两个夹板分别位于所述侧板的一侧,两个夹板通过上下两根导轨与所述侧板滑动连接,两个夹板上带有丝杠套,丝杠套与所述丝杠连接。
10、优选地,所述空托盘移送机构包括空盘移送模组、升降气缸、吸盘架和托盘吸盘,所述控盘移送模组安装在空托盘机构和托盘移栽电芯机构之间,所述升降气缸安装在所述控盘移送模组的活动端,所述吸盘架固定在所述升降气缸的活塞杆上,所述托盘吸盘安装在所述吸盘架上。
11、优选地,所述两个夹板上分别设有防粘连机构,所述防粘连机构包括防粘连气缸和隔块,所述防粘连气缸与所述隔块连接,所述隔块从两个夹板上的方孔中穿过。
12、本发明的有益效果是:与现有技术相比,本专利是将需要3个人的工作,代替为1个人能操作多台设备;
13、本专利能够实现具备对电芯翻转和不翻转的功能;
14、本专利是实现了采用四轴机器人进行取放电池,提高了生产效率,同时能够减少对电池的磨损。
技术特征:
1.一种聚合物电芯自动弹夹导入托盘设备,其特征在于:包括基板以及分别安装在基板上的弹夹上下料机构、推挡机构、电芯顶升机构、第一四轴机器人、传动带移栽机构、电池翻转机构、视觉定位机构、第二四轴机器人、空托盘机构、空托盘移送机构和托盘移栽电芯机构;所述弹夹上下料机构用于盛装满载弹夹和将空弹夹移出;所述推挡机构用于将弹夹上下料机构上满载的电池移栽至上料工位,电芯顶升机构位于上料工位底部,用于将电池提升至上料工位;所述第一四轴机器人用于将电芯从电芯顶升机构中取走并放到传动带移栽机构上;所述传动带移栽机构用于传送电芯;所述电池翻转机构安装在传动带移栽机构上,用于将电芯翻转;所述视觉定位机构安装在基板上,用于对电芯拍照分析;所述第二四轴机器人用于将电芯从传动带移栽机构上取下并放到托盘上;所述空托盘机构用于盛装空托盘,所述空托盘移送机构用于将空托盘机构中的空托盘移送到所述托盘移栽电芯机构内;所述托盘移栽电芯机构用于盛放托盘以及电芯。
2.根据权利要求1所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述弹夹上下料机构安装在所述基板上,所述弹夹上下料机构包括并行的第一传送带和第二传送带,两个传送带传送方向相反,所述推挡机构安装在第一传送带和第二传送带之间,所述推挡机构包括推挡电机和与其连接的推板,推板将第一传送带上的带有电芯的弹夹推到一侧的第二传送带上。
3.根据权利要求1所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述电芯顶升机构安装在第二传送带的下方,所述电芯顶升机构包括顶升电机、顶升块和顶升齿条,所述顶升电机安装在基板的下部,顶升电机驱动带有齿轮,齿轮驱动所述顶升齿条上下移动,所述顶升块固定在所述顶升齿条底部,顶升块用于推动弹夹内的电芯向上移动。
4.根据权利要求1所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:第一四轴机器人安装在所述基板上,其包括四轴机器人,四轴机器人端部固定有吸盘座,吸盘座中部固定有真空吸盘。
5.根据权利要求4所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述传送带移栽机构安装在所述基板上并位于所述第一四轴机器人的一侧,所述传送带移栽机构包括由移栽支架、移栽电机和第三传送带,第三传送带安装在移栽支架上,第三传送带由所述移栽电机驱动转动;所述电池翻转机构安装在所述第三传送带上方,所述电池翻转机构包括伺服电机、同步带、同步带轮、翻转支座、翻转盘和翻转吸盘,所述翻转支座为两个,分别固定在移栽支架的两侧,所述翻转盘的两端通过转轴与所述翻转支座连接,所述翻转吸盘为多个,分别安装在所述翻转盘上,所述伺服电机安装在移栽支架的下方,通过同步带和同步带轮驱动所述翻转盘转动。
6.根据权利要求5所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述视觉定位机构包括镜头支架、镜头和光源,所述镜头支架固定在基板上并位于第三传送带的一侧,所述镜头和光源分别固定在镜头支架的端部。
7.根据权利要求6所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述第二四轴机器人与所述第一四轴机器人的结构相同,第二四轴机器人安装在基板上并位于第三传送带的末端。
8.根据权利要求7所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述空托盘机构和托盘移栽电芯机构的结构相同,并列安装在所述基板上,二者分别包括托盘顶升机构和托盘限位导向机构,所述托盘顶升机构位于所述托盘限位导向机构的底部,所述托盘顶升机构包括顶升电机、顶升盘、顶升支架、顶升导杆和顶升齿条,所述顶升支架固定在基板的底部,顶升盘的底部与所述顶升齿条的上部连接,所述顶升盘从基板上的方孔漏出,顶升齿条与齿轮箱内的齿轮啮合,所述齿轮箱的输入端与所述顶升电机的输出端连接,所述顶升电机固定在所述顶升支架上,所述顶升盘的底部设有两根与顶升支架上导套滑动连接的所述导杆;所述托盘限位导向机构包括导向伺服电机、丝杠、侧板和两个夹板,所述导向伺服电机安装在所述基板上,所述伺服电机与所述丝杠连接,所述丝杠的两端通过连接座与所述侧板连接,所述两个夹板分别位于所述侧板的一侧,两个夹板通过上下两根导轨与所述侧板滑动连接,两个夹板上带有丝杠套,丝杠套与所述丝杠连接。
9.根据权利要求8所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述空托盘移送机构包括空盘移送模组、升降气缸、吸盘架和托盘吸盘,所述控盘移送模组安装在空托盘机构和托盘移栽电芯机构之间,所述升降气缸安装在所述控盘移送模组的活动端,所述吸盘架固定在所述升降气缸的活塞杆上,所述托盘吸盘安装在所述吸盘架上。
10.根据权利要求8所述的聚合物电芯自动弹夹导入托盘设备,其特征在于:所述两个夹板上分别设有防粘连机构,所述防粘连机构包括防粘连气缸和隔块,所述防粘连气缸与所述隔块连接,所述隔块从两个夹板上的方孔中穿过。
技术总结
本发明属于锂离子电池制造技术领域,具体涉及一种聚合物电芯自动弹夹导入托盘设备,包括基板以及分别安装在基板上的弹夹上下料机构、推挡机构、电芯顶升机构、第一四轴机器人、传动带移栽机构、电池翻转机构、视觉定位机构、第二四轴机器人、空托盘机构、空托盘移送机构和托盘移栽电芯机构。本专利是实现了采用四轴机器人进行取放电池,提高了生产效率,同时能够减少对电池的磨损。
技术研发人员:王魁,闫佳,李学健,李磊,李建立
受保护的技术使用者:天津聚元新能源科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!