用于举升机末端定位的液压缸伸缩量预测方法及系统
本发明涉及举升机,尤其涉及用于举升机末端定位的液压缸伸缩量预测方法及系统。
背景技术:
1、举升机采用机械原理进行升降,速度通常较快,可快速将重物举升到合适的高度,相比人工搬运,机械式举升机的效率要高得多,能够节省大量的时间和人力成本,举升机的操作相对简单,只需掌握一定的基本操作技巧即可。
2、公开号cn117069022a:一种高空作业车辆变幅度安全作业范围控制方法及装置,举升机需要获取举升机车辆的支腿扩桥幅度、臂架变幅角度、车架倾斜角度以及当前臂架伸缩量,根据支腿扩桥幅度、臂架变幅角度及车架倾斜角度,得到臂架需要的伸缩量,该方法举升机末端定位存在以下缺点:
3、1、由于无法准确预测举升液压缸的长度,操作人员需要不断进行调整和校准,增加了操作复杂性和工作难度;
4、2、利用视觉系统判断工作平台位置,需要大规模数据来进行有效的训练模型,对资源的需求比较大,增加举升机的使用成本;
5、3、举升机在运作过程中需要考虑多个参数,如臂架变幅角度和倾斜角度等,控制这些参数需要繁琐的手动调整,尤其是在执行复杂工作任务时。
技术实现思路
1、针对现有方法的不足,本发明解决现有方法存在滞后性和稳态误差导致实际举升高度可能与预期目标存在偏差的空间定位不精确问题;以及无法准确预测举升液压缸的长度,需要操作人员进行微调,存在操作复杂和工作难度大的问题。
2、本发明所采用的技术方案是:用于举升机末端定位的液压缸伸缩量预测方法包括以下步骤:
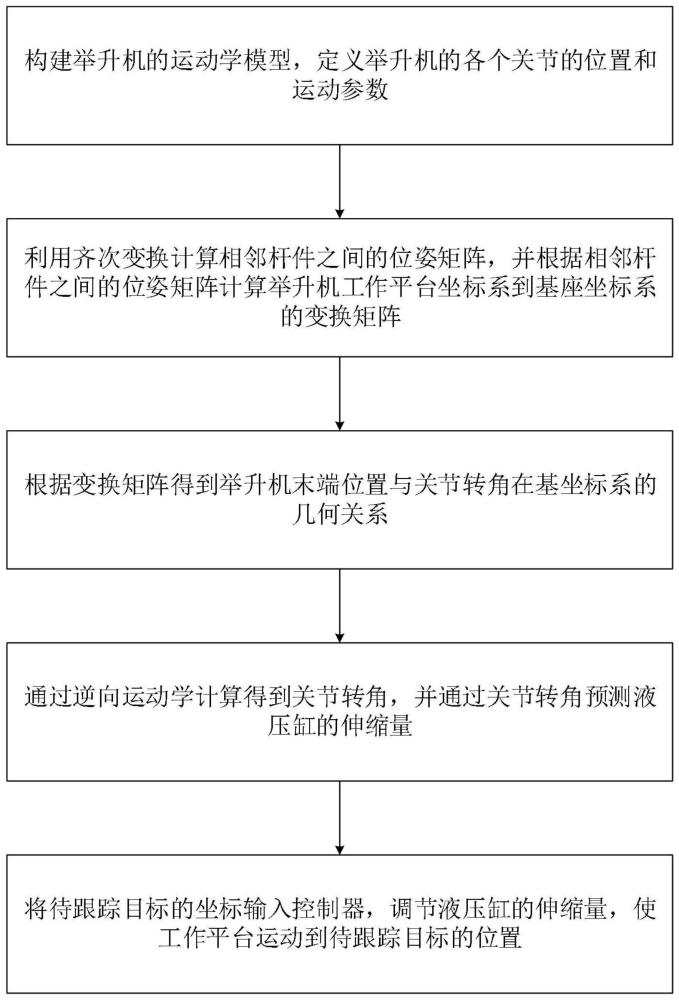
3、步骤一、构建举升机的运动学模型,定义举升机的各个关节的位置和运动参数;
4、作为本发明的一种优选实施方式,举升机包括四个转台、一个基座和三个液压缸。
5、步骤二、利用齐次变换矩阵计算相邻杆件之间的位姿矩阵,并根据相邻杆件之间的位姿矩阵计算举升机工作平台坐标系到基座坐标系的变换矩阵;
6、作为本发明的一种优选实施方式,举升机工作平台坐标系到基座坐标系的变换矩阵的公式为:
7、
8、式中,s0=sinθ0;c0=cosθ0;c1=cosθ1;s12=sin(θ1+θ2);c12=cos(θ1+θ2);s123=sin(θ1+θ2+θ3);c123=cos(θ1+θ2+θ3);l0为第一转台杆件的长度;l1为第二转台杆件的长度;l2为第三转台杆件的长度;l3为第四转台杆件的长度;θ0为基座的初始旋转角度;θ1为第二转台杆件与局部坐标系x1轴的夹角;θ2为第三转台杆件与局部坐标系x2轴的夹角;θ3为第四转台杆件与局部坐标系x3轴的夹角。
9、作为本发明的一种优选实施方式,第四转台杆件与局部坐标系x3轴的夹角θ3=0。
10、步骤三、根据变换矩阵得到举升机末端位置与关节转角在基坐标系的几何关系;
11、作为本发明的一种优选实施方式,几何关系的公式为:
12、
13、其中,xd,yd,zd为举升机末端位置坐标,d0为接续公垂线的偏距。
14、步骤四、通过逆向运动学计算得到关节转角,并通过关节转角预测液压缸的伸缩量;
15、作为本发明的一种优选实施方式,逆向运动学计算得到关节转角的公式为:
16、
17、其中,σ1=xdl1-l0l1+zdl1-d0l1;σ2=(xd-l0)2+(zd-d0)2-(l2+l3)2。
18、作为本发明的一种优选实施方式,液压缸的伸缩量的公式为:
19、
20、其中,α1=2(l1d0-l1xd-l1zd),
21、
22、lco1为第一转台的c点到o1点的长度,lbo1为第一液压缸的端点b到o1点的长度,lac为第一转台的a点到c点的长度,lfo2为第二液压缸的端点f到o2点的长度,leo2为第二液压缸的端点e到o2点的长度。
23、步骤五、将待跟踪目标的坐标输入控制器,调节液压缸的伸缩量,使工作平台运动到待跟踪目标的位置。
24、作为本发明的一种优选实施方式,用于举升机末端定位的液压缸伸缩量预测系统,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现用于举升机末端定位的液压缸伸缩量预测方法。
25、作为本发明的一种优选实施方式,存储有计算机程序代码的计算机可读介质,计算机程序代码在由处理器执行时实现用于举升机末端定位的液压缸伸缩量预测方法。
26、本发明的有益效果:
27、1、提高空间定位准确性:通过预测举升液压缸的长度,能够帮助举升机实现更精确的空间定位;
28、2、简化操作流程:通过预测举升液压缸的长度,操作人员不再需要手动调整和校准举升动作,简化了操作流程,减少操作人员的工作负担,降低操作错误的风险,提高工作效率。
29、3、降低运维成本:更准确的举升空间定位可以减少误差导致的货物损坏或错误位置,从而降低运维成本;
30、4、提高安全性:精确的举升空间定位可以减少举升机意外事故的风险,保障工作人员和周围环境的安全;同时,操作人员不需要频繁地进行手动调整,也降低了因人为因素引起的潜在安全隐患。
技术特征:
1.用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,举升机工作平台坐标系到基座坐标系的变换矩阵的公式为:
3.根据权利要求1所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,几何关系的公式为:
4.根据权利要求3所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,逆向运动学计算得到关节转角的公式为:
5.根据权利要求4所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,液压缸的伸缩量的公式为:
6.根据权利要求1所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,举升机包括四个转台、一个基座和三个液压缸。
7.根据权利要求2所述的用于举升机末端定位的液压缸伸缩量预测方法,其特征在于,第四转台杆件与局部坐标系x3轴的夹角θ3=0。
8.用于举升机末端定位的液压缸伸缩量预测系统,其特征在于,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现如权利要求1-7任一项所述的用于举升机末端定位的液压缸伸缩量预测方法。
9.存储有计算机程序代码的计算机可读介质,其特征在于,计算机程序代码在由处理器执行时实现如权利要求1-7任一项所述的用于举升机末端定位的液压缸伸缩量预测方法。
技术总结
本发明涉及举升机技术领域,尤其涉及用于举升机末端定位的液压缸伸缩量预测方法及系统,包括构建举升机的运动学模型,定义举升机的各个关节的位置和运动参数;利用齐次变换计算相邻杆件之间的位姿矩阵,并根据相邻杆件之间的位姿矩阵计算举升机工作平台坐标系到基座坐标系的变换矩阵;根据变换矩阵得到举升机末端位置与关节转角在基坐标系的几何关系;通过逆向运动学计算得到关节转角,并通过关节转角预测液压缸的伸缩量;将待跟踪目标的坐标输入控制器,调节液压缸的伸缩量,使工作平台运动到待跟踪目标的位置。本发明解决现有方法存在滞后性和稳态误差导致实际举升高度可能与预期目标存在偏差的空间定位不精确问题。
技术研发人员:陈从平,吴伟鹏,陈奔,陆鹏,李明春,徐志伟
受保护的技术使用者:常州大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!