一种高空作业平台的制作方法
本申请属于工程机械领域,具体地涉及一种高空作业平台。
背景技术:
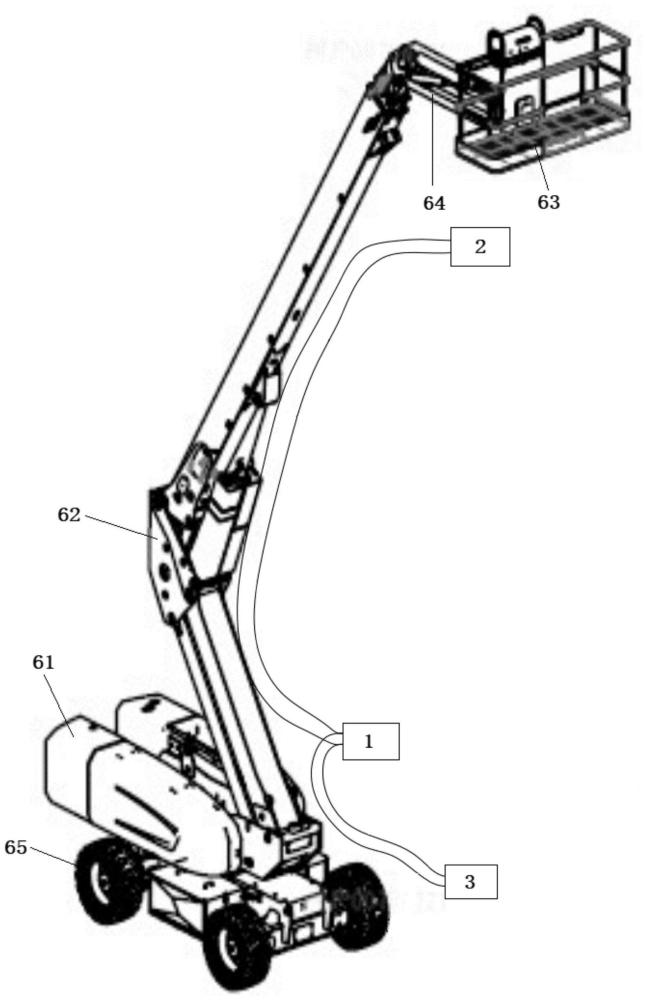
1、高空作业平台是服务于各个行业高空作业、设备安装、检修等可移动性高空作业的一种工程机械。如图1所示,高空作业平台一般包括:转台61、臂架62、工作平台63、飞臂64和底盘65。底盘65能够进行自由移动。转台61安装在底盘65上,并能够相对底盘65旋转。臂架62的底端安装在转台61上,臂架62的顶端依次安装飞臂64和工作平台63。臂架62和飞臂64能够带动工作平台63在空中移动。
2、现有的高空作业平台一般采用集中式的液压系统传动,即:液压源由位于底盘65的液压泵组集中提供,液压油通过供油管路集中供给至多个控制阀,再由控制阀按各位置的执行机构的需要对总流量进行分配和控制。对于臂架62较长的高空作业平台而言,臂架62末端的执行机构远离液压源,液压传动的供油管路较长,存在液压油的压力损失大、执行机构动作响应迟缓等问题。
技术实现思路
1、本申请的目的是提供一种高空作业平台,用于解决集中式液压系统的供油管路较长的问题,达到降低系统能耗、提高末端执行机构响应能力的效果。
2、为了实现上述目的,本申请提供一种高空作业平台,包括:
3、第一液压系统,包括设置在转台上的转台执行机构、设置在臂架上的臂架执行机构以及均设置在所述转台上的第一控制阀和第一电动泵组;所述转台执行机构和所述臂架执行机构均由所述第一控制阀控制,所述第一电动泵组为所述第一控制阀供油;
4、第二液压系统,包括设置在工作平台上的平台执行机构、设置在飞臂上的飞臂执行机构以及均设置在所述工作平台上的第二控制阀和第二电动泵组;所述平台执行机构和所述飞臂执行机构均由所述第二控制阀控制,所述第二电动泵组为所述第二控制阀供油;
5、供电模块,为所述第一电动泵组以及所述第二电动泵组供电;和
6、控制模块,分别与所述第一控制阀、所述第二控制阀、所述第一电动泵组以及所述第二电动泵组通信。
7、在一些实施方式中,所述第一电动泵组的功率大于所述第二电动泵组的功率,所述第一电动泵组的排量大于所述第二电动泵组的排量。
8、在一些实施方式中,所述第一液压系统还包括接入液压回路的散热器,所述散热器用于降低所述液压回路内液压油的温度。
9、在一些实施方式中,所述供电模块包括设置在所述转台上的应急动力电池;所述第一液压系统还包括设置在所述转台上的为所述第一控制阀供油的第一应急电动泵组;所述应急动力电池为所述第一应急电动泵组供电。
10、在一些实施方式中,所述第二液压系统还包括能够代替所述第二电动泵组为所述第二控制阀供油的第二应急电动泵组和/或应急手动泵组;所述第二应急电动泵组由所述供电模块供电,并与所述控制模块通信。
11、在一些实施方式中,所述转台执行机构包括与所述第一控制阀管路连接的转台回转马达;所述臂架执行机构包括分别与所述第一控制阀管路连接的臂架变幅油缸和臂架伸缩油缸。
12、在一些实施方式中,所述平台执行机构包括分别与所述第二控制阀管路连接的平台摆动油缸和平台调平油缸;所述飞臂执行机构包括与所述第二控制阀管路连接的飞臂变幅油缸。
13、在一些实施方式中,所述控制模块包括设置在所述转台上的控制器和设置在所述工作平台上的第一io模块;所述控制器通过所述第一io模块与所述第二控制阀通信;所述控制器、所述第一io模块、所述第一电动泵组以及所述第二电动泵组组成can通信网络。
14、在一些实施方式中,所述高空作业平台还包括:
15、第三液压系统,包括设置在底盘上的底盘执行机构、第三控制阀和第三电动泵组;所述底盘执行机构由所述第三控制阀控制,所述第三电动泵组为所述第三控制阀供油;
16、其中,所述供电模块能够为所述第三电动泵组供电,所述控制模块分别与所述第三控制阀、所述第三电动泵组通信。
17、在一些实施方式中,所述底盘执行机构包括与所述第三控制阀管路连接的底盘浮动油缸和底盘转向油缸。
18、与现有技术相比,本申请的有益效果为:
19、本申请通过分布式的第一液压系统和第二液压系统,结合电力传输,从根本上取消了长距离的供油管路,使液压系统内的执行机构就近得到驱动,减少了液压油的压力损失,降低了低温环境对液压油粘度的影响,进而解决集中式液压系统的供油管路较长的问题,达到降低系统能耗、提高末端执行机构响应能力的效果。
20、本申请实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种高空作业平台,其特征在于,包括:
2.根据权利要求1所述的高空作业平台,其特征在于,所述第一电动泵组(14)的功率大于所述第二电动泵组(24)的功率,所述第一电动泵组(14)的排量大于所述第二电动泵组(24)的排量。
3.根据权利要求2所述的高空作业平台,其特征在于,所述第一液压系统(1)还包括接入液压回路的散热器(15),所述散热器(15)用于降低所述液压回路内液压油的温度。
4.根据权利要求1所述的高空作业平台,其特征在于,所述供电模块包括设置在所述转台(61)上的应急动力电池(42);所述第一液压系统(1)还包括设置在所述转台(61)上的为所述第一控制阀(13)供油的第一应急电动泵组(16);所述应急动力电池(42)为所述第一应急电动泵组(16)供电。
5.根据权利要求1所述的高空作业平台,其特征在于,所述第二液压系统(2)还包括能够代替所述第二电动泵组(24)为所述第二控制阀(23)供油的第二应急电动泵组(25)和/或应急手动泵组(26);所述第二应急电动泵组(25)由所述供电模块供电,并与所述控制模块通信。
6.根据权利要求1所述的高空作业平台,其特征在于,所述转台执行机构(11)包括与所述第一控制阀(13)管路连接的转台回转马达;所述臂架执行机构(12)包括分别与所述第一控制阀(13)管路连接的臂架变幅油缸和臂架伸缩油缸。
7.根据权利要求1所述的高空作业平台,其特征在于,所述平台执行机构(21)包括分别与所述第二控制阀(23)管路连接的平台摆动油缸和平台调平油缸;所述飞臂执行机构(22)包括与所述第二控制阀(23)管路连接的飞臂变幅油缸。
8.根据权利要求1所述的高空作业平台,其特征在于,所述控制模块包括设置在所述转台(61)上的控制器(51)和设置在所述工作平台(63)上的第一io模块(52);所述控制器(51)通过所述第一io模块(52)与所述第二控制阀(23)通信;所述控制器(51)、所述第一io模块(52)、所述第一电动泵组(14)以及所述第二电动泵组(24)组成can通信网络。
9.根据权利要求1至8中任意一项所述的高空作业平台,其特征在于,所述高空作业平台还包括:
10.根据权利要求9所述的高空作业平台,其特征在于,所述底盘执行机构(31)包括与所述第三控制阀(32)管路连接的底盘浮动油缸和底盘转向油缸。
技术总结
本申请涉及工程机械领域,公开了一种高空作业平台。该高空作业平台,包括:第一液压系统,包括设置在转台上的转台执行机构、设置在臂架上的臂架执行机构以及均设置在转台上的第一控制阀和第一电动泵组;转台执行机构和臂架执行机构均由第一控制阀控制,第一电动泵组为第一控制阀供油;第二液压系统,包括设置在工作平台上的平台执行机构、设置在飞臂上的飞臂执行机构以及均设置在工作平台上的第二控制阀和第二电动泵组;平台执行机构和飞臂执行机构均由第二控制阀控制,第二电动泵组为第二控制阀供油;供电模块和控制模块。本申请用于解决集中式液压系统的供油管路较长的问题,达到降低系统能耗、提高末端执行机构响应能力的效果。
技术研发人员:任会礼,张斌,邹婿邵,肖承丰,郭强
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!