吊车臂位置检测方法、存储介质、电子设备和系统与流程
本发明涉及碰撞检测,尤其涉及一种吊车臂位置检测方法、存储介质、电子设备和系统。
背景技术:
1、既有线指在公路、铁路、管道、电缆或其它运输行业中原先已经建造好的原有线路,改造原有线路时称原有线路为既有线。在既有线的改造过程中会使用吊车搬运建材,在吊车起吊过程中,操作人员常把注意力放在被吊物体上,而常常忽略了吊车臂的位置,在被吊物体移动过程中吊车臂可能碰撞附近的障碍物,造成经济损失或者人身安全问题。
2、因此,需要提供一种技术方案检测吊车臂是否存在碰撞风险。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种吊车臂位置检测方法、存储介质、电子设备和系统,以检测吊车臂是否存在碰撞风险。
2、根据本发明实施例的第一方面,提供了一种吊车臂位置检测方法,所述吊车臂位置检测方法包括:
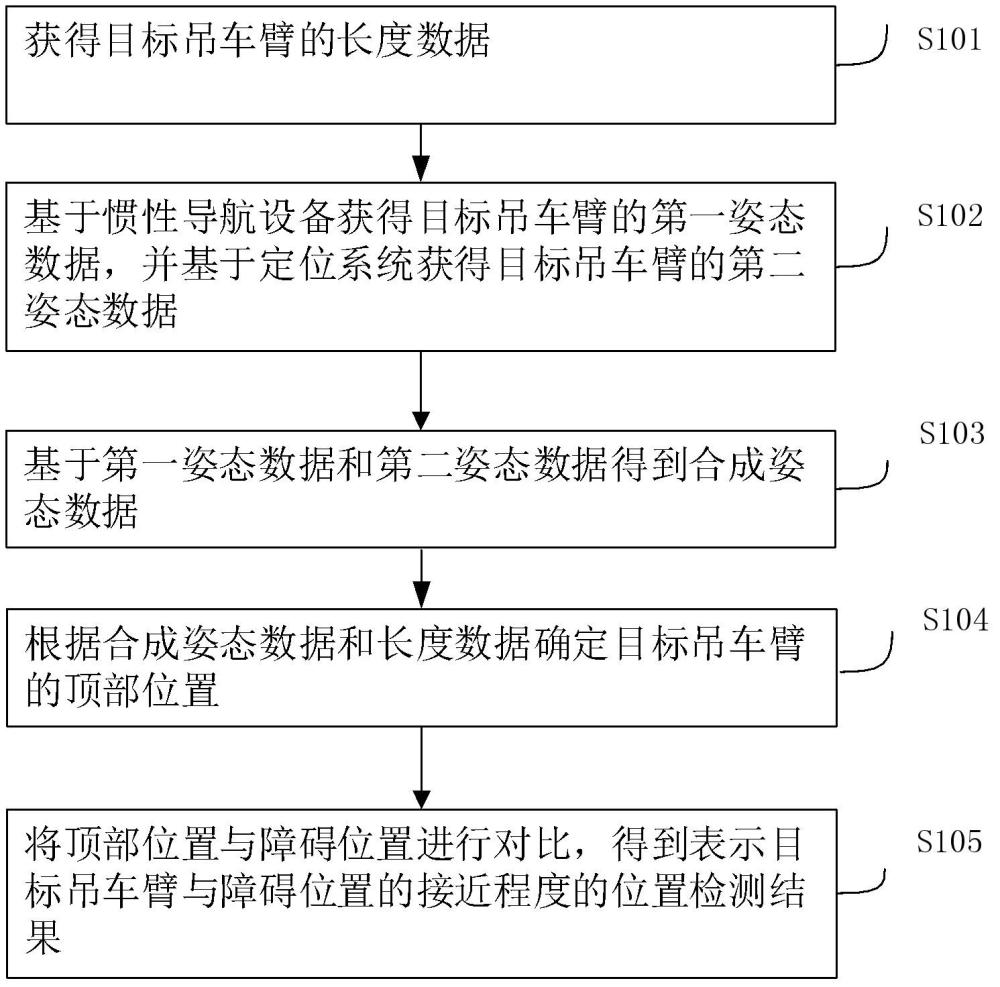
3、获得目标吊车臂的长度数据;
4、基于惯性导航设备获得所述目标吊车臂的第一姿态数据,并基于定位系统获得所述目标吊车臂的第二姿态数据;
5、基于所述第一姿态数据和所述第二姿态数据得到合成姿态数据;
6、根据所述合成姿态数据和所述长度数据确定所述目标吊车臂的顶部位置;
7、将所述顶部位置与障碍位置进行对比,得到表示所述目标吊车臂与所述障碍位置的接近程度的位置检测结果。
8、根据本发明实施例的第二方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现上述吊车臂位置检测方法。
9、根据本发明实施例的第三方面,提供了一种电子设备,包括:存储器、处理器;所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述吊车臂位置检测方法。
10、根据本发明实施例的第四方面,提供了一种吊车臂位置检测系统,所述吊车臂位置检测系统包括:测距模块、组合惯导系统、数据传输模块、算法模块,所述数据传输模块与所述测距模块、所述组合惯导系统以及所述算法模块分别连接;其中,
11、所述测距模块,用于获得目标吊车臂的长度数据;
12、所述组合惯导系统,用于基于惯性导航设备获得所述目标吊车臂的第一姿态数据,并基于定位系统获得所述目标吊车臂的第二姿态数据;
13、所述数据传输模块,用于获得所述长度数据、所述第一姿态数据和所述第二姿态数据,并将所述长度数据、所述第一姿态数据和所述第二姿态数据转发至所述算法模块;
14、所述算法模块,用于基于所述第一姿态数据和所述第二姿态数据得到合成姿态数据;根据所述合成姿态数据和所述长度数据确定所述目标吊车臂的顶部位置;将所述顶部位置与障碍位置进行对比,得到表示所述目标吊车臂与所述障碍位置的接近程度的位置检测结果。
15、本发明实施例提供的方案中,通过目标吊车臂的长度数据、表示目标吊车臂的姿态的合成姿态数据获得目标吊车臂的顶部位置,将顶部位置与障碍位置进行对比,确定目标吊车臂与障碍位置的接近程度,从而能够检测吊车臂是否存在碰撞风险。
16、并且,在获得合成姿态数据的过程中使用了基于惯性导航设备获得的第一姿态数据和基于定位系统获得的第二姿态数据,参考了多种设备的姿态数据,能够更全面、准确地表示目标吊车臂的姿态,且第一姿态数据和第二姿态数据在合成时互相参照,可以减小表示姿态的误差,从而结合长度数据能够更为准确地确定吊车臂所处的位置,提高了位置检测的准确性。
17、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种吊车臂位置检测方法,其特征在于,所述吊车臂位置检测方法包括:
2.根据权利要求1所述的吊车臂位置检测方法,其特征在于,所述第一姿态数据的更新频率大于所述第二姿态数据的更新频率。
3.根据权利要求1所述的吊车臂位置检测方法,其特征在于,所述基于惯性导航设备获得所述目标吊车臂的第一姿态数据,包括:
4.根据权利要求1所述的吊车臂位置检测方法,其特征在于,所述定位系统为全球导航卫星系统gnss;
5.根据权利要求4所述的吊车臂位置检测方法,其特征在于,所述基于定位系统获得所述目标吊车臂的第二姿态数据,包括:
6.根据权利要求5所述的吊车臂位置检测方法,其特征在于,所述第一经纬度数据和所述第二经纬度数据分别为:所述定位系统通过实时动态rtk技术对所述第一gnss天线、所述第二gnss天线进行定位得到的经纬度数据;
7.根据权利要求1所述的吊车臂位置检测方法,其特征在于,所述基于所述第一姿态数据和所述第二姿态数据得到合成姿态数据之后,所述吊车臂位置检测方法还包括:
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-7中任一项所述的吊车臂位置检测方法。
9.一种电子设备,其特征在于,包括:存储器、处理器;所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如权利要求1-7中任一项所述的吊车臂位置检测方法。
10.一种吊车臂位置检测系统,其特征在于,所述吊车臂位置检测系统包括:测距模块、组合惯导系统、数据传输模块、算法模块,所述数据传输模块与所述测距模块、所述组合惯导系统以及所述算法模块分别连接;其中,
技术总结
本发明公开了一种吊车臂位置检测方法、存储介质、电子设备和系统,所述吊车臂位置检测方法包括:获得目标吊车臂的长度数据;基于惯性导航设备获得所述目标吊车臂的第一姿态数据,并基于定位系统获得所述目标吊车臂的第二姿态数据;基于所述第一姿态数据和所述第二姿态数据得到合成姿态数据;根据所述合成姿态数据和所述长度数据确定所述目标吊车臂的顶部位置;将所述顶部位置与障碍位置进行对比,得到表示所述目标吊车臂与所述障碍位置的接近程度的位置检测结果。应用本发明实施例提供的方案能够检测吊车臂是否存在碰撞风险。
技术研发人员:朱宏博,赵静文,赵邦国,沈翔,李晓磊,黄成
受保护的技术使用者:中铁四局集团有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!