一种用于柔性智能料仓的转移机构的制作方法
本发明涉及自动化加工,具体而言,涉及一种用于柔性智能料仓的转移机构。
背景技术:
1、在柔性智能机加工中,机械手进行夹取物件以及转移物件,已经是较为常规的技术了,通过机械手可以xy轴进行移动,实现对物件的位置行进,然后通过采用夹持气缸进行夹取托盘或者直接夹取代加工的物件,如此的方案呢,其具有一个劣势,特别是加工完的物件,如果直接用夹持气缸进行夹取势必会伤害到加工好物件的表面,导致物件在转移过程中被伤害;或者夹持气缸夹持托盘进行转移作业,但是如此夹取,也可能导致夹持的托盘不稳的情况发生,导致待加工物件或者加工完的物件,在转移过程中倾斜而倒翻而受损。
技术实现思路
1、为解决上述问题中的至少一个方面,本发明提供的一种用于柔性智能料仓的转移机构,其包括桁架组件、配置在桁架组件且可在xy轴方向移动的机械手组件、固定设置在机械手组件下方的旋转组件;所述旋转组件下方配置有与其同轴旋转的托盘接驳座,所述托盘接驳座内设有接驳盘,所述接驳盘的输出端设置有带缺口的圆台形孔,所述带缺口的圆台形孔与托盘的连接块配合连接。
2、作为优选,所述托盘接驳座包括与旋转组件相配合的衔接座、接驳主体以及与接驳盘相配合的配合座;所述配合座通过一组嵌入槽与接驳盘配合,进而通过螺栓进行锁紧固定。
3、作为优选,所述接驳盘左右两侧具有一组限位槽,前后两侧具有一组锥形槽;所述托盘接驳座通过前后两侧的带缺口的圆台形孔可抓取一个以上托盘。
4、作为优选,所述带缺口的圆台形孔上口大且下口小。
5、作为优选,所述桁架组件包括水平设置的桁架、以及配置在桁架下方的支撑固定架;所述桁架与支撑固定架相互垂直设计。
6、作为优选,所述桁架水平方向设置有机械手水平移动齿轮齿条组合和水平驱动电机;配置在机械手水平移动齿轮齿条组合并且在水平驱动电机的驱动下在机械手水平移动齿轮齿条组合上进行水平移动。
7、作为优选,所述机械手组件设置有机械手竖直移动齿轮齿条组合,且通过竖直驱动电机驱动机械手组件在机械手竖直移动齿轮齿条组合处上下滑动。
8、作为优选,所述机械手组件通过转接组件部分配置在机械手水平移动齿轮齿条组合可随其水平运动,部分配置在机械手竖直移动齿轮齿条组合中可随其上下运动。
9、一种托盘,其包括托盘主体、固定设置在托盘主体一侧的连接块;所述托盘接驳座通过带缺口的圆台形孔与连接块相配合从而进行抓取作业。
10、作为优选,所述连接块整体呈锥形,所述连接块通过螺栓搞定在托盘主体一侧并且向外部突出,其中,所述连接块上部小且下部大。
11、本发明的一种用于柔性智能料仓的转移机构,其采用垂直设计的桁架组件,其具有良好的支撑力,能够在机加工领域中提供一个稳定的支撑作用;其次就是,采用齿轮带动丝杠的驱动方式,驱动更有力且稳定性更强;再者就是采用一个具有带缺口的圆台形孔的接驳盘,该接驳盘通过带缺口的圆台形孔与托盘的连接块向无缝的契合,无论在提升还是下降的过程中,都较为稳定,且占用的面积更小,让机械手的转移空间设计的更加小巧,从整体上可以减少空间,同样也是可以节省设备的造价成本。
技术特征:
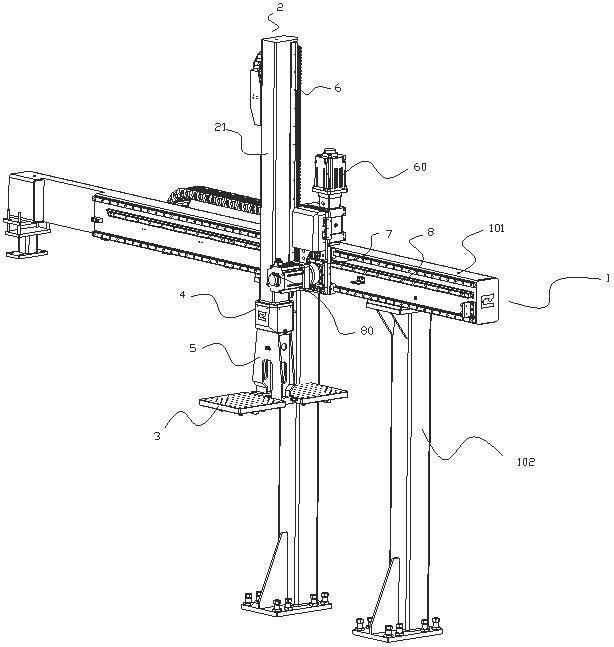
1.一种用于柔性智能料仓的转移机构,所述用于柔性智能料仓的转移机构包括桁架组件(1)、配置在桁架组件(1)且可在xy轴方向移动的机械手组件(2)、固定设置在机械手组件(2)下方的旋转组件(4);其特征在于:所述旋转组件(4)下方配置有与其同轴旋转的托盘接驳座(5),所述托盘接驳座(5)内设有接驳盘(51),所述接驳盘(51)的输出端设置有带缺口的圆台形孔(50),所述带缺口的圆台形孔(50)与托盘(3)的连接块(31)配合连接。
2.根据权利要求1所述的用于柔性智能料仓的转移机构,其特征在于:所述托盘接驳座(5)包括与旋转组件(4)相配合的衔接座(52)、接驳主体(53)以及与接驳盘(51)相配合的配合座(54);所述配合座(54)通过一组嵌入槽(541)与接驳盘(51)配合,进而通过螺栓进行锁紧固定。
3.根据权利要求2所述的用于柔性智能料仓的转移机构,其特征在于:所述接驳盘(51)左右两侧具有一组限位槽(511),前后两侧具有一组锥形槽;所述托盘接驳座(5)通过前后两侧的带缺口的圆台形孔(50)可抓取一个以上托盘(3)。
4.根据权利要求3所述的用于柔性智能料仓的转移机构,其特征在于:所述带缺口的圆台形孔(50)上口大且下口小。
5.根据权利要求1所述的用于柔性智能料仓的转移机构,其特征在于:所述桁架组件(1)包括水平设置的桁架(101)、以及配置在桁架(101)下方的支撑固定架(102);所述桁架(101)与支撑固定架(102)相互垂直设计。
6.根据权利要求5所述的用于柔性智能料仓的转移机构,其特征在于:所述桁架(101)水平方向设置有机械手水平移动齿轮齿条组合(8)和水平驱动电机(80);配置在机械手水平移动齿轮齿条组合(8)并且在水平驱动电机(80)的驱动下在机械手水平移动齿轮齿条组合(8)上进行水平移动。
7.根据权利要求6所述的用于柔性智能料仓的转移机构,其特征在于:所述机械手组件(2)设置有机械手竖直移动齿轮齿条组合(6),且通过竖直驱动电机(60)驱动机械手组件(2)在机械手竖直移动齿轮齿条组合(6)处上下滑动。
8.根据权利要求7所述的用于柔性智能料仓的转移机构,其特征在于:所述机械手组件(2)通过转接组件(7)部分配置在机械手水平移动齿轮齿条组合(8)可随其水平运动,部分配置在机械手竖直移动齿轮齿条组合(6)中可随其上下运动。
9.根据权利要求8所述的用于柔性智能料仓的转移机构,其特征在于:所述托盘(3)包括托盘主体(30)、连接块(31)固定设置在托盘主体(30)一侧;所述托盘接驳座(5)通过带缺口的圆台形孔(50)与连接块(31)相配合从而进行抓取作业。
10.根据权利要求9所述的用于柔性智能料仓的转移机构,其特征在于:所述连接块(31)整体呈锥形,所述连接块(31)通过螺栓搞定在托盘主体(30)一侧并且向外部突出,所述连接块(31)上部小且下部大。
技术总结
本发明提供的一种用于柔性智能料仓的转移机构,其包括桁架组件、配置在桁架组件且可在XY轴方向移动的机械手组件、固定设置在机械手组件下方的旋转组件;所述旋转组件下方配置有与其同轴旋转的托盘接驳座,所述托盘接驳座内设有接驳盘,所述接驳盘的输出端设置有带缺口的圆台形孔,所述带缺口的圆台形孔与托盘的连接块配合连接。其整体结构较为紧凑,特别是采用特殊设计的托盘接驳座,通过与托盘相互契合的方式进行夹取作业,夹取部件结构小巧且稳定,具有很好的实用性。
技术研发人员:李全林,朱炜炜,孙殿承,孙吕挺,袁鹏冲,叶科剑
受保护的技术使用者:宁波天瑞精工机械有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!