一种空试管收纳盒补给机构的制作方法
本发明涉及运输设备,具体涉及一种空试管收纳盒补给机构。
背景技术:
1、现有的空试管收纳盒补给机构在供给空试管收纳盒的过程中,只能实现收纳盒的自动补给,例如公开号为cn113320906a的专利公开的落料机空托盘自动补给机构以及授权公告号为cn206407600u的专利公开的轴承套圈自动补给机构,此类自动补给机构不能根据工作人员的生理情况进行自动调节,导致工作人员容易产生疲劳感,影响了工作人员的工作效率。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供一种空试管收纳盒补给机构,以解决现有技术中,自动补给机构只能机械式的供给收纳盒,不能根据工作人员的生理情况进行自动调节,导致工作人员容易产生疲劳感,影响了工作人员的工作效率的问题。
2、本发明的目的可以通过以下技术方案实现:
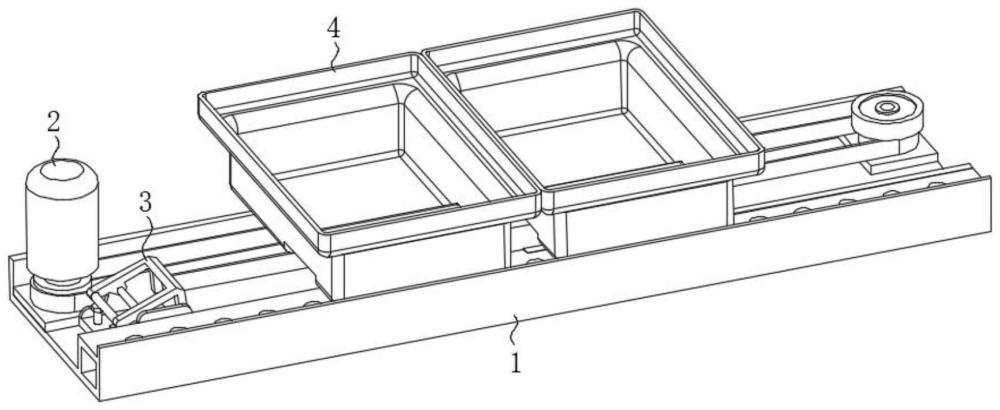
3、具体是提供一种空试管收纳盒补给机构,包括机构底座,所述机构底座上设有直线驱动机构和往复推进机构;所述机构底座包括底座主体,底座主体的一侧设有移动轨道,移动轨道的顶面设有光感应器和压力感应器;所述底座主体上还设有控制模块和时钟模块,控制模块预先收集历史训练数据集合,基于历史训练数据集合,训练出预测移动轨道上的空试管收纳盒本体的补给位置的机器学习模型;所述控制模块通过光感应器采集空试管收纳盒本体的位置数据,通过时钟模块采集空试管收纳盒本体的时间数据,通过压力感应器采集空试管收纳盒本体的重量数据;基于空试管收纳盒本体的位置数据、时间数据和重量数据,控制模块使用机器学习模型预测空试管收纳盒本体的补给位置;所述控制模块通过直线驱动机构和往复推进机构推动空试管收纳盒本体,使空试管收纳盒本体到达补给位置。
4、作为本发明进一步的方案:所述历史训练数据包括n组训练数据,每组训练数据包括特征数据和标签数据;其中特征数据包括位置数据、时间数据和重量数据;
5、所述位置数据为收集每组训练数据时,空试管收纳盒本体在移动轨道上的空间位置;
6、所述时间数据为收集每组训练数据时,空试管收纳盒本体在移动轨道上的时间点;
7、所述重量数据为收集每组训练数据时,压力感应器检测到空试管收纳盒本体的压力值;
8、所述标签数据为收集每组训练数据时,空试管收纳盒本体在移动轨道上的补给位置。
9、作为本发明进一步的方案:所述控制模块训练预测移动轨道上的空试管收纳盒本体的补给位置的机器学习模型的方式为:
10、将每组训练数据中的特征数据转化为特征向量,以每组特征向量为机器学习模型的输入,机器学习模型对每组特征数据预测的补给位置作为输出,以每组特征数据对应标签数据中的补给位置作为预测目标,以最小化所有特征向量的预测准确度之和作为训练目标;
11、预测准确度的计算公式为ai=(bi-ci)2,其中ai为预测准确度,bi为第i组特征向量对应的预测的补给位置,ci为第i组标签数据中的补给位置;
12、对机器学习模型进行训练,直至预测准确度之和达到收敛时停止训练。
13、作为本发明进一步的方案:所述控制模块以移动轨道的顶面中心点x轴的原点,建立直线坐标系。
14、作为本发明进一步的方案:所述光感应器基于直线坐标系采集空试管收纳盒本体两侧的坐标数据,基于空试管收纳盒本体两侧的坐标数据计算出空试管收纳盒本体底面的中心点坐标,空试管收纳盒本体底面的中心点坐标为空间位置。
15、作为本发明进一步的方案:所述控制模块基于时钟模块预设空试管收纳盒本体时间区域;
16、时间区域包括充沛时间阶段和疲劳时间阶段。
17、作为本发明进一步的方案:所述控制模块预设空试管收纳盒本体的压力值的阈值;
18、若压力值小于阈值,则说明空试管收纳盒本体需要继续补给空试管;
19、若压力值大于或者等于阈值,则说明空试管收纳盒本体不需要补给空试管。
20、作为本发明进一步的方案:所述直线驱动机构包括驱动电机,驱动电机的输出轴固定连接有驱动齿轮,驱动齿轮的侧面嵌套有驱动带。
21、作为本发明进一步的方案:所述往复推进机构包括移动座,移动座的一侧固定连接有同步块,移动座的内侧中间位置安装有旋转轴,旋转轴的侧面嵌套有推进块,移动座的顶面一端螺栓连接有支撑螺栓,同步块与驱动带固定连接。
22、作为本发明进一步的方案:所述推进块靠近支撑螺栓的一侧固定连接有配置块。
23、本发明的有益效果:
24、1、本发明中,控制模块根据工位上的空试管收纳盒本体的位置数据、时间数据和重量数据,使用机器学习模型预测下个空试管收纳盒本体的补给位置,当工位上的空试管收纳盒本体填满后,控制模块通过直线驱动机构和往复推进机构推动下个空试管收纳盒本体,使下个空试管收纳盒本体到达补给位置,该补给位置是最契合当前工作人员放置空试管的位置,一方面可以契合当前工作人员的工作习惯,提高当前工作人员的工作效率,另一方面也能提高工作人员放置空试管的舒适性,降低工作人员的疲劳感。
25、2、本发明中,通过设置的直线驱动机构和往复推进机构,在往复推进机构推动空试管收纳盒本体前,往复推进机构处于空试管收纳盒本体的右侧,此时推进块在配置块的重力作用下会向配置块一侧倾斜,当推进块接触到空试管收纳盒本体的侧面时,空试管收纳盒本体会挤压推进块,使推进块以旋转轴为圆心转动至水平位置,然后呈水平的推进块继续向左侧移动,此时推进块会沿着空试管收纳盒本体的底面移动;
26、当推进块移出空试管收纳盒本体的底面后,此时推进块在配置块的重力作用下会再次向配置块一侧倾斜,然后直线驱动机构便驱动推进块向右侧移动,此时的推进块会被支撑螺栓限制位置,保证推进块可以作用在空试管收纳盒本体的左侧,并将空试管收纳盒本体向右侧推动,最终将空试管收纳盒本体推动至补给位置,当该空试管收纳盒本体被工作人员填满后,推进块会重复向左侧移动,然后再推动另一个空试管收纳盒本体,保证可以不断的供给空试管收纳盒本体。
技术特征:
1.一种空试管收纳盒补给机构,其特征在于,包括机构底座(1),所述机构底座(1)上设有直线驱动机构(2)和往复推进机构(3);
2.根据权利要求1所述的一种空试管收纳盒补给机构,其特征在于,所述历史训练数据包括n组训练数据,每组训练数据包括特征数据和标签数据;其中特征数据包括位置数据、时间数据和重量数据;
3.根据权利要求2所述的一种空试管收纳盒补给机构,其特征在于,所述控制模块训练预测移动轨道(12)上的空试管收纳盒本体(4)的补给位置的机器学习模型的方式为:
4.根据权利要求2所述的一种空试管收纳盒补给机构,其特征在于,所述控制模块以移动轨道(12)的顶面中心点x轴的原点,建立直线坐标系。
5.根据权利要求4所述的一种空试管收纳盒补给机构,其特征在于,所述光感应器(13)基于直线坐标系采集空试管收纳盒本体(4)两侧的坐标数据,基于空试管收纳盒本体(4)两侧的坐标数据计算出空试管收纳盒本体(4)底面的中心点坐标,空试管收纳盒本体(4)底面的中心点坐标为空间位置。
6.根据权利要求2所述的一种空试管收纳盒补给机构,其特征在于,所述控制模块基于时钟模块预设空试管收纳盒本体(4)时间区域;
7.根据权利要求2所述的一种空试管收纳盒补给机构,其特征在于,所述控制模块预设空试管收纳盒本体(4)的压力值的阈值;
8.根据权利要求1所述的一种空试管收纳盒补给机构,其特征在于,所述直线驱动机构(2)包括驱动电机(21),驱动电机(21)的输出轴固定连接有驱动齿轮(22),驱动齿轮(22)的侧面嵌套有驱动带(23)。
9.根据权利要求8所述的一种空试管收纳盒补给机构,其特征在于,所述往复推进机构(3)包括移动座(31),移动座(31)的一侧固定连接有同步块(32),移动座(31)的内侧中间位置安装有旋转轴(34),旋转轴(34)的侧面嵌套有推进块(33),移动座(31)的顶面一端螺栓连接有支撑螺栓(36),同步块(32)与驱动带(23)固定连接。
10.根据权利要求9所述的一种空试管收纳盒补给机构,其特征在于,所述推进块(33)靠近支撑螺栓(36)的一侧固定连接有配置块(35)。
技术总结
本发明公开了一种空试管收纳盒补给机构,涉及运输设备技术领域,包括机构底座,机构底座上设有直线驱动机构和往复推进机构;机构底座包括底座主体,底座主体的一侧设有移动轨道,移动轨道的顶面设有光感应器和压力感应器;底座主体上还设有控制模块和时钟模块,控制模块预先收集历史训练数据集合,基于历史训练数据集合,训练出预测移动轨道上的空试管收纳盒本体的补给位置的机器学习模型;控制模块通过光感应器采集空试管收纳盒本体的位置数据,通过时钟模块采集空试管收纳盒本体的时间数据;一方面可以契合当前工作人员的工作习惯,提高当前工作人员的工作效率,另一方面也能提高工作人员放置空试管的舒适性,降低工作人员的疲劳感。
技术研发人员:孙国建
受保护的技术使用者:上海金禹罗博电子科技有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!