一种土壤样品存储库系统的制作方法
本发明涉及土壤样品存储,尤其涉及一种土壤样品存储库系统。
背景技术:
1、土壤环境检测中会采集大量的土壤样品。现有技术中,为便于土壤样品的取放,通常采用多个储存架进行保存。储存架一般成排放置,排与排之间留有通道,然后人员进入通道内取放对应存储架上的土壤样品。
2、如,一篇公开号为cn 115303688 a的中国发明专利申请公开一种土壤样品库,包括平行设置的两条轨道、多个存储架和脚踏平台。多个存储架每个存储架通过架体移动机构沿两条轨道移动设置,以使任意存储架面前能够形成取放通道,每个存储架正面设有多个样品存储空间;脚踏平台位于两个轨道之间,且两端分别通过踏板移动机构沿对应的轨道移动设置,并适于沿两个轨道之间的空间从存储架下方穿过、以移动至任意存储架前面的取放通道,脚踏平台还设有多个沿存储架横向分布的升降单元,各个升降单元可在取放通道内升至不同高度以组成阶梯,脚踏平台的升降单元能够在取放通道内组成阶梯。当取放高位置的土壤样品时,操作者借助脚踏平台人为取放,操作费时、费力。另外,由于土壤样品的保存多采用玻璃瓶,玻璃瓶编号放置于储存架中存储,这种人为取放也容易碰撞导致玻璃瓶破碎,并且单纯的编号管理也不利于土壤样品的精细化管理。
技术实现思路
1、本发明的目的在于提供一种土壤样品取放方便准确、减少因人为操作导致样品瓶破碎的土壤样品存储库系统,为解决现有技术中存在的一个或多个技术问题,至少提供一种有益选择或创造条件。
2、为达到以上目的,本发明采用如下技术方案。
3、一种土壤样品存储库系统,其包括仓库货架、agv搬运机器人、六轴机器人和管理电脑,所述仓库货架用来放置土壤瓶储存箱,所述agv搬运机器人用来实现所述土壤瓶储存箱的搬运及在所述仓库货架上的取放,所述六轴机器人用来实现土壤瓶与所述土壤瓶储存箱之间的取放,所述管理电脑与所述agv搬运机器人和所述六轴机器人连接,用来实现土壤样品的管理并控制所述agv搬运机器人和所述六轴机器人工作。
4、上述土壤样品存储库系统的入库方法为:1)管理控制系统登陆,凭账号和密码进入管理电脑的管理控制系统,管理控制系统的所有操作记录可查不可更改;2)打印、粘贴样品标签,将土壤样品信息转化成样品二维码,并打印成样品标签后粘贴在土壤瓶上;3)扫码入库,用扫码枪扫描样品标签,将样品标签所含信息录入到管理控制系统,待信息录入完成后,控制六轴机器人将土壤瓶放入到土壤瓶储存箱;4)重复步骤3),待土壤瓶储存箱的库位全部放满之后,控制agv搬运机器人将土壤瓶储存箱搬运到仓库货架的对应货架位,完成入库。
5、上述土壤样品存储库系统的水的出库方法为:1)管理控制系统登陆,凭账号和密码进入管理电脑的管理控制系统,管理电脑的所有操作记录可查不可更改;2)录入待出库样品二维码,复制待出库的样品二维码到管理控制系统的搜索栏,搜索得到待出库样品所在货架位;3)土壤瓶储存箱取出,控制agv搬运机器人将对应货架位的土壤瓶储存箱搬运到六轴机器人工位;4)待出库样品取出,利用六轴机器人将待出库样品从土壤瓶储存箱搬中取出并放置到实验台,完成出库。
6、更为优选的是,所述仓库货架包括成排设置的多个储存架,各所述储存架具有上下分布的若干用来放置土壤瓶储存箱的储存台面,储存架的排与排之间留有agv搬运机器人行走的通道,agv搬运机器人在通道内行走搬运并将土壤瓶储存箱放置到相应的储存台面上。
7、更为优选的是,所述agv搬运机器人包括自动引导车辆和安装在所述自动引导车辆上的升降取送装置,所述自动引导车辆通过地标导航自动将土壤瓶储存箱运输至指定地点,所述升降取送装置包括竖直轨道、升降安装在所述竖直轨道上搬运臂、以及驱动所述搬运臂升降的动力机构。agv搬运机器人通过升降取送装置取放土壤瓶储存箱,仓库货架具有容搬运臂进出的避让位和位于避让位上方的置物架。
8、将土壤瓶储存箱搬运到仓库货架的流程为:1)装载土壤瓶储存箱的agv搬运机器人到达仓库货架的取放工位,2)自动引导车辆带着搬运臂和搬运臂上的土壤瓶储存箱向避让位移动、进而使土壤瓶储存箱位于置物架上方,3)搬运臂下降使土壤瓶储存箱放置在置物架上,4)自动引导车辆带着搬运臂退出避让位,完成土壤瓶储存箱的存放。
9、将土壤瓶储存箱从仓库货架上取出的流程为:1)agv搬运机器人到达仓库货架的取放工位,自动引导车辆带着搬运臂进入避让位;2)搬运臂上升从置物架上托起土壤瓶储存箱;3)自动引导车辆带着搬运臂和搬运臂上的土壤瓶储存箱向远离仓库货架的方向上移动,实现土壤瓶储存箱的取出。
10、更为优选的是,在所述六轴机器人上安装有土壤瓶专用夹具,该土壤瓶专用夹具包括手指气缸组件,所述手指气缸组件包括气缸主体和活动设置在气缸主体底部的两根手指组件,通过两根手指组件相对、相背运动实现对土壤瓶的取放。
11、更为优选的是,在气缸主体的底部设置有两条滑槽,各手指组件的顶部分别设置有与相应的滑槽配合连接的滑座;滑座在滑槽所限定的轨迹上来回滑动、实现两手指组件的夹放动作。
12、所述手指组件包括悬臂部和夹持部,悬臂部与滑座连接固定,夹持部呈内凹状,两个夹持部相互配合夹住土壤瓶的瓶颈。
13、更为优选的是,在所述滑座包括活动设置在滑槽内的滑块和固定在滑块下方的横板,悬臂部通固定在横板的底部;滑块的厚度大于滑槽的深度,滑块的下部凸出于滑槽外;滑块沿其轴向设置有多个螺孔,横板通过与不同螺孔的安装实现两手指组件之间的最大间距调节。
14、更为优选的是,所述土壤样品信息包括:样品名称、样品编号、取样点经纬度、采样时间、采样人员、检测项目、采样深度、检测单位、形态、状态、以及储存条件。
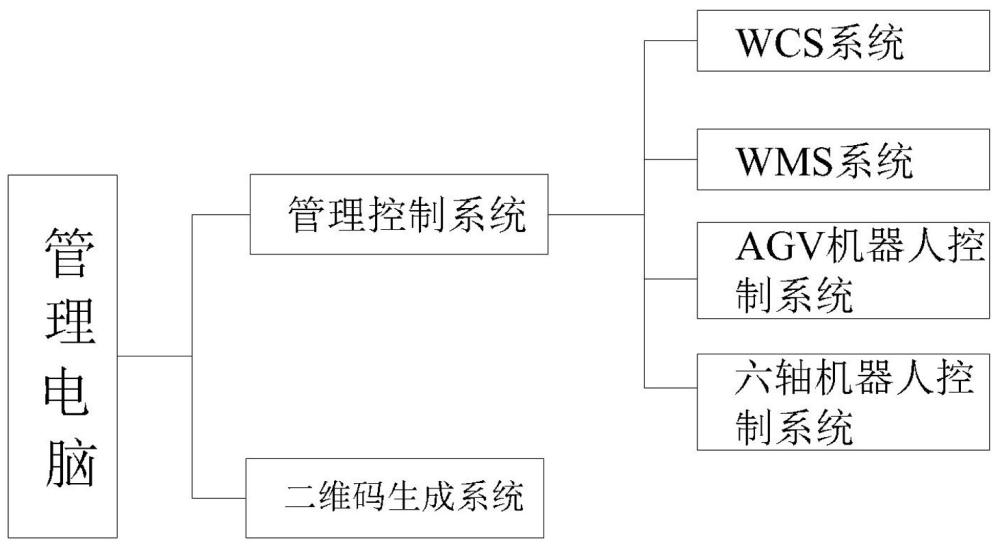
15、更为优选的是,所述管理电脑具有二维码生成系统,土壤样品信息的二维码转化、样品标签的粘贴及扫描入库均在实验台完成。
16、更为优选的是,所述管理电脑的管理控制系统包括wcs系统、wms系统、agv机器人控制系统和六轴机器人控制系统。
17、更为优选的是,所述土壤瓶储存箱具有多个土壤瓶安放腔,所述土壤瓶安放腔成排设置,相邻两排的土壤瓶安放腔相互错位;对应各所述土壤瓶安放腔设有用来固定土壤瓶的弹性件。
18、本发明采用如上技术方案至少具有以下有益效果。
19、由于土壤样品瓶为标准玻璃制品,具有易碎,外尺寸标准化的特点,普通仓储设备使用后难找易烂,信息容易出错。因而对土壤样品实施智能存放管理,意义重大。
20、本发明提供的一种土壤样品存储库系统,利用gv搬运机器人、六轴机器人和管理电脑实现土壤样品的智能化管理,具有安全性好、方便样品精准存储、便于查询和分析等特点,满足实验室土壤日常留样以及批量留样的自动运送、存储以及样品取用管理需求,并在样品库运行后可以通过专用接口与其他样品管理系统对接,后续的样品库扩容非常方便。
技术特征:
1.一种土壤样品存储库系统,其特征在于,包括仓库货架、agv搬运机器人、六轴机器人和管理电脑,所述仓库货架用来放置土壤瓶储存箱,所述agv搬运机器人用来实现所述土壤瓶储存箱的搬运及在所述仓库货架上的取放,所述六轴机器人用来实现土壤瓶与所述土壤瓶储存箱之间的取放,所述管理电脑与所述agv搬运机器人和所述六轴机器人连接,用来实现土壤样品的管理并控制所述agv搬运机器人和所述六轴机器人工作;
2.根据权利要求1所述的一种土壤样品存储库系统,其特征在于,所述仓库货架包括成排设置的多个储存架,各所述储存架具有上下分布的若干用来放置土壤瓶储存箱的储存台面,储存架的排与排之间留有agv搬运机器人行走的通道,agv搬运机器人在通道内行走搬运并将土壤瓶储存箱放置到相应的储存台面上。
3.根据权利要求1或2所述的一种土壤样品存储库系统,其特征在于,所述agv搬运机器人包括自动引导车辆和安装在所述自动引导车辆上的升降取送装置,所述自动引导车辆通过地标导航自动将土壤瓶储存箱运输至指定地点,所述升降取送装置包括竖直轨道、升降安装在所述竖直轨道上搬运臂、以及驱动所述搬运臂升降的动力机构;
4.根据权利要求1所述的一种土壤样品存储库系统,其特征在于,在所述六轴机器人上安装有土壤瓶专用夹具,该土壤瓶专用夹具包括手指气缸组件,所述手指气缸组件包括气缸主体和活动设置在气缸主体底部的两根手指组件,通过两根手指组件相对、相背运动实现对土壤瓶的取放。
5.根据权利要求4所述的一种土壤样品存储库系统,其特征在于,在气缸主体的底部设置有两条滑槽,各手指组件的顶部分别设置有与相应的滑槽配合连接的滑座;滑座在滑槽所限定的轨迹上来回滑动、实现两手指组件的夹放动作;
6.根据权利要求5所述的一种土壤样品存储库系统,其特征在于,在所述滑座包括活动设置在滑槽内的滑块和固定在滑块下方的横板,悬臂部通固定在横板的底部;滑块的厚度大于滑槽的深度,滑块的下部凸出于滑槽外;滑块沿其轴向设置有多个螺孔,横板通过与不同螺孔的安装实现两手指组件之间的最大间距调节。
7.根据权利要求1所述的一种土壤样品存储库系统,其特征在于,所述土壤样品信息包括:样品名称、样品编号、取样点经纬度、采样时间、采样人员、检测项目、采样深度、检测单位、形态、状态、以及储存条件。
8.根据权利要求1或7所述的一种土壤样品存储库系统,其特征在于,所述管理电脑具有二维码生成系统,土壤样品信息的二维码转化、样品标签的粘贴及扫描入库均在实验台完成。
9.根据权利要求1所述的一种土壤样品存储库系统,其特征在于,所述管理电脑的管理控制系统包括wcs系统、wms系统、agv机器人控制系统和六轴机器人控制系统。
10.根据权利要求1所述的一种土壤样品存储库系统,其特征在于,所述土壤瓶储存箱具有多个土壤瓶安放腔,所述土壤瓶安放腔成排设置,相邻两排的土壤瓶安放腔相互错位;对应各所述土壤瓶安放腔设有用来固定土壤瓶的弹性件。
技术总结
本发明涉及土壤样品存储技术领域,公开一种土壤样品存储库系统,其包括仓库货架、AGV搬运机器人、六轴机器人和管理电脑,仓库货架用来放置土壤瓶储存箱,AGV搬运机器人用来实现土壤瓶储存箱的搬运及在仓库货架上的取放,所述六轴机器人用来实现土壤瓶与土壤瓶储存箱之间的取放,管理电脑与AGV搬运机器人和六轴机器人连接,用来实现土壤样品的管理并控制AGV搬运机器人和六轴机器人工作。本发明利用GV搬运机器人、六轴机器人和管理电脑实现土壤样品的智能化管理,具有安全性好、方便样品精准存储、便于查询和分析等特点,满足实验室土壤日常留样以及批量留样的自动运送、存储以及样品取用管理需求,且后续的样品库扩容非常方便。
技术研发人员:赖日明,阮博,黄明珠,谢健超
受保护的技术使用者:佛山市环境保护投资有限公司
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!