一种具有自适应特性的起升系统智能控制方法
本发明涉及起重机控制,尤其是涉及一种具有自适应特性的起升系统智能控制方法。
背景技术:
1、公知的,起重机是一种智能化起吊搬运设备,近年来,随着科学技术的发展,起重机的应用范围越来越广泛,对于冶金车间来说,需要起重机完成金属块以及坩埚的吊起和移动,所以起重机要保持长时间的运行;
2、传统起重机的操作采用的是手动控制的方式,操作人员手动操作起重机的大车、小车以及卷筒的工作,且由于人体的局限性,上述操作需要分别进行,这样就造成了吊钩在下放时,大车或者小车同时移动就会容易造成吊钩的摇晃,从而影响吊钩所钩的坩埚的稳定性;
3、因此,综上所述,目前市场上需要一种能够保证钢丝绳稳定性的起升系统。
技术实现思路
1、为了克服背景技术中的不足,本发明公开了一种具有自适应特性的起升系统智能控制方法。
2、为实现上述发明目的,本发明采用如下技术方案:
3、一种具有自适应特性的起升系统智能控制方法,具体为:
4、步骤1.数据采集与预处理:
5、控制器采集起重机大车和小车的运行速度、钢丝绳的摆动角以及钢丝绳的收卷速度;
6、步骤2.基于pid控制器建立防摇摆模型:
7、1)设立pid控制方程:
8、;(1)
9、其中u(t)为控制输入;为摆角误差;、和分别是比例、积分和微分增益,为时间常数;
10、2)根据钢丝绳的摆动参数设立系统动态方程:
11、;(2)
12、其中是钢丝绳摆动的角度;是钢丝绳摆动的角速度;是钢丝绳摆动的角加速度;i是转动惯量;m是质量;g是重力加速度;l是摆长;b是阻尼系数;
13、3)将公式(1)代入公式(2),得到防摇摆模型:
14、;(3)
15、步骤3.对防摇摆模型进行模型预测控制:
16、1) 在时间步长下,将连续时间的防摇摆模型转化为每一时间步t的离散时间形式:
17、;(4)
18、2)在控制输入加入加权和,得到最小化系统状态方程:
19、;(5)
20、其中n是优化时域的预测步数;、 和 分别是钢丝绳摆动的角度、角速度和pid控制器输出的相应权重;
21、3)将最小化系统状态方程转化为优化方程:
22、;(6)
23、步骤4.在仿真环境中验证设计的控制算法,然后在实际卷扬机系统中进行实验。
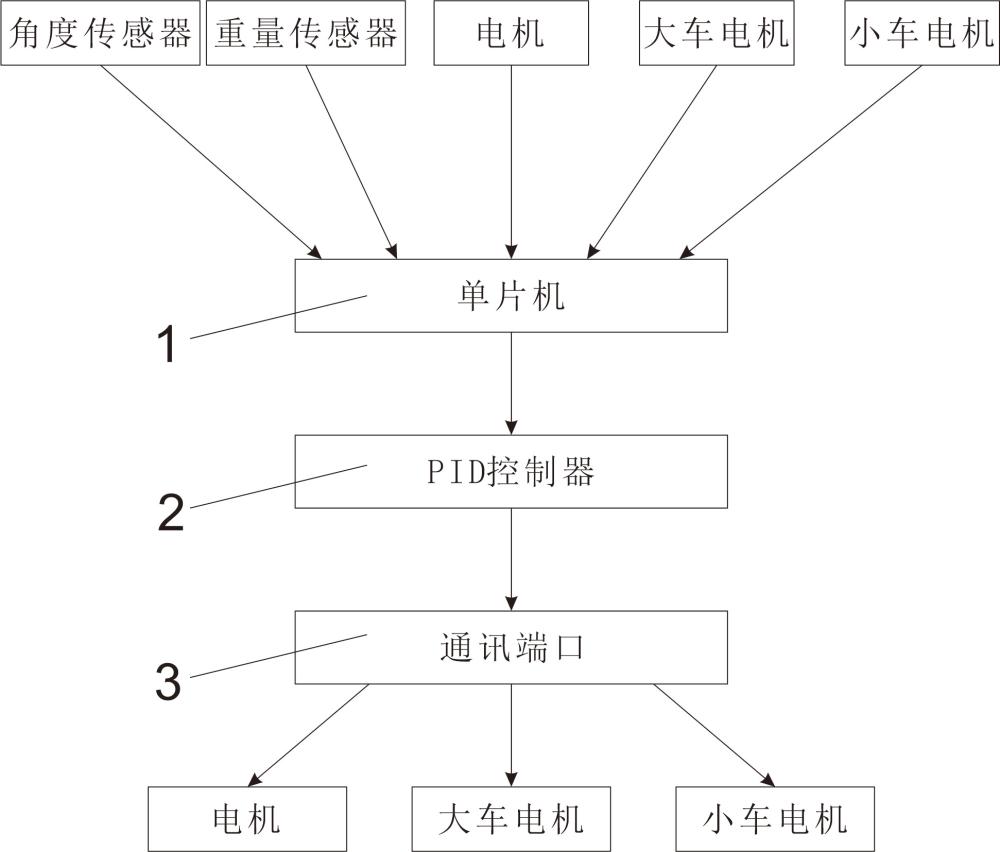
24、优选的,所述控制器包含单片机、pid控制器和通讯接口,其中单片机的数据信号输入端口分别与角度传感器、重量传感器、卷筒电机、大车电机和小车电机的输出端口对应电连接,单片机的控制信号输入端口通过通讯接口与外部操作手柄对应连接,单片机的输出端口与pid控制器对应电连接,pid控制器分别与卷筒电机、大车电机和小车电机的输入端口对应电连接。
25、优选的,所述单片机设有安全限制单元,以确保系统操作在安全范围内。
26、优选的,所述单片机设有监控单元,该单元用于检测系统状态并进行故障诊断。
27、优选的,所述通讯接口包含多频段并行传输单元、波束成型单元、自适应调制单元、加密单元和网络切片单元,其中多频段并行传输单元能够在多个频段下与外部操作手柄进行通讯,波束成型单元能够针对外部操作手柄所在的区域进行信号聚焦,自适应调制单元能够根据网络条件和通讯需求动态调整信号的调制方式,加密单元能够对输入单片机的控制信号进行加密处理,网络切片单元能够对网络资源进行动态分配和管理。
28、由于采用如上所述的技术方案,本发明具有如下有益效果:
29、本发明公开的一种具有自适应特性的起升系统智能控制方法,能够计算出最优的起重机运行参数,然后由控制器控制相应执行机构动作,实现卷筒自动动作,同时根据起吊物品的重量以及起吊过程中钢丝绳的摆动情况来实时调整发送至电机的输出信号,从而保证起吊过程平稳进行。
技术特征:
1.一种具有自适应特性的起升系统智能控制方法,其特征是:具体为:
2.如权利要求1所述的具有自适应特性的起升系统智能控制方法,其特征是:所述单片机(1)设有安全限制单元,以确保系统操作在安全范围内。
3.如权利要求1所述的具有自适应特性的起升系统智能控制方法,其特征是:所述单片机(1)设有监控单元,该单元用于检测系统状态并进行故障诊断。
4.如权利要求1所述的具有自适应特性的起升系统智能控制方法,其特征是:所述通讯接口(3)采用5g通讯技术。
5.如权利要求1所述的具有自适应特性的起升系统智能控制方法,其特征是:所述通讯接口(3)包含多频段并行传输单元(301)、波束成型单元(302)、自适应调制单元(303)、加密单元(304)和网络切片单元(305),其中多频段并行传输单元(301)能够在多个频段下与外部操作手柄进行通讯,波束成型单元(302)能够针对外部操作手柄所在的区域进行信号聚焦,自适应调制单元(303)能够根据网络条件和通讯需求动态调整信号的调制方式,加密单元(304)能够对输入单片机(1)的控制信号进行加密处理,网络切片单元(303)能够对网络资源进行动态分配和管理。
技术总结
一种具有自适应特性的起升系统智能控制方法,通过建立的防摇摆模型,进行模型预测控制,以及在仿真环境中验证设计的控制算法,能够计算出最优的起重机运行参数,然后由控制器控制相应执行机构动作,实现卷筒自动动作,同时根据起吊物品的重量以及起吊过程中钢丝绳的摆动情况来实时调整发送至电机的输出信号,从而保证起吊过程中钢丝绳的稳定性。
技术研发人员:聂福全,杨文莉,聂雨萱,蔡晓杰,郭长宇,姜震,张亚奇,张卫东,张明明,张丽丽,张清锋
受保护的技术使用者:河南科技学院
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!