一种空地物料转载用摘钩装置及使用方法
本发明属于矿井机械臂领域,具体涉及一种空地物料转载用摘钩装置及使用方法。
背景技术:
1、目前,国内外许多矿井内的矿车、单轨吊和提升机等矿山装备的摘钩系统大都采用人工的形式进行作业,矿车连接环、矿井提升机、矿井绞车的摘钩是煤矿井下作业中的常见任务,涉及到煤矿的运输、提升、支护等多个环节,而这些任务通常由矿工手工完成,不仅耗时耗力,而且存在较大的安全隐患,如钢丝绳的断裂、滑落、缠绕等,可能造成矿工的伤亡和设备的损坏。
2、随着煤矿生产规模的扩大和技术的进步,煤矿钢丝绳的规格和数量也不断增加,使得煤矿钢丝绳的摘钩任务更加繁重和复杂,对矿工的技能和体力要求也更高,给矿工的安全和健康带来更大的威胁;为了实现煤矿生产的智能化、机器人化和无人化,提高煤矿生产效率和安全性,降低煤矿生产成本和能耗,减少煤矿生产对环境的影响,减少矿工的劳动强度和危险性,煤矿钢丝绳的摘钩任务是亟待机器人替代的关键环节之一。
3、在申请号为202211211221.4专利中,记载了一种敞车自动摘钩装置及工作方法,包括行走单元,布置在待摘钩敞车一侧,具有带动摘钩机械手沿敞车行进方向运行的x向运动单元,和带动摘钩机械手沿垂直方向运动的z向运动单元;摘钩机械手,包括通过连接板与z向运动单元连接的y向展臂双杆气缸,y向展臂双杆气缸的固定端与连接板连接,活动端通过测距回转机构与手柄卡钩连接,手柄卡钩的顶端设有定位靠轮,利用能够与车钩手柄临时连接且被气缸带动的摘钩机械手,配合轨道式行走随行结构产生的近似圆弧运动,实现自动摘钩。
4、然而针对空地物料转载领域尚未见到将图像识别系统技术运用于摘钩装置的发明专利,故本发明结合煤矿井下实际工况与图像识别技术,发明一种空地物料转载用摘钩装置及使用方法。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种空地物料转载用摘钩装置及使用方法,该装置利用图像识别技术,实现井下空地物料转载时摘钩作业的智能化和无人化,提高煤矿生产效率和安全性,该装置搭载的监测传感器与图像识别装置同时可以与巡检机器人结合部署,通过机械臂的多自由度弥补巡检机器人巡检死角,实现一臂多用,解决了背景技术中提到的问题。
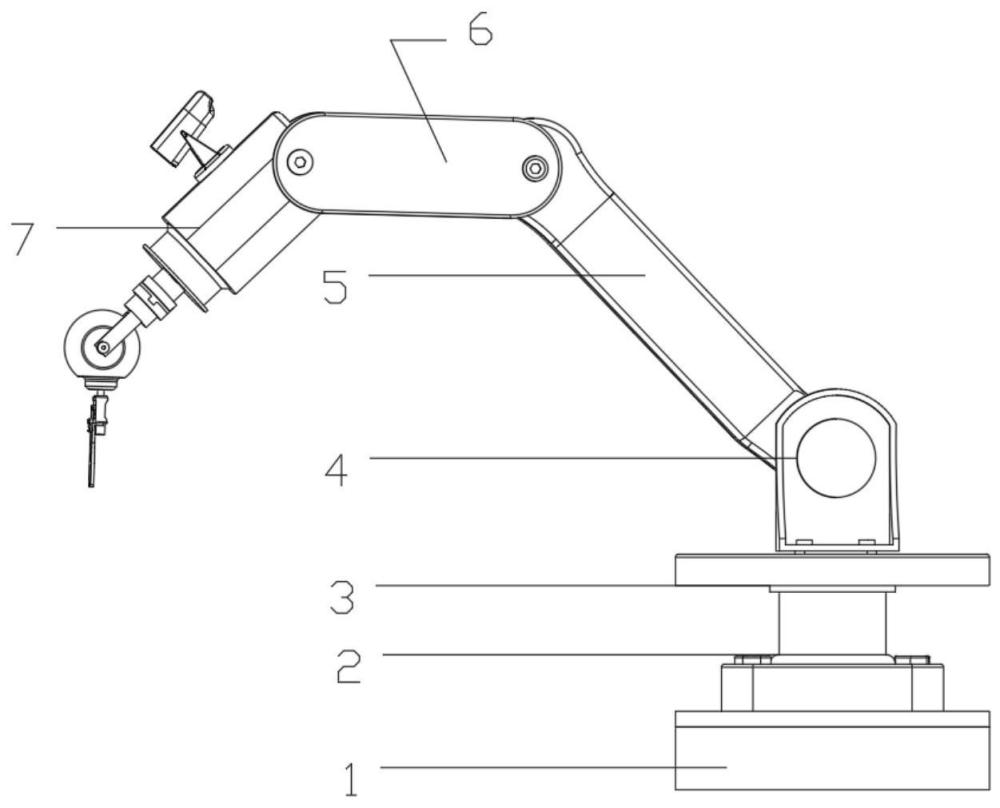
2、本发明的采用以下技术方案:一种空地物料转载用摘钩装置,其结构特点在于包括底盘、底座、底座转盘、臂连接件、大臂、小臂、末端执行装置。
3、进一步地,所述底盘可安装于煤矿特种巡检机器人上,也可单独配置固定安装;所述底座与底盘固定连接,底座转盘与底座旋转连接,臂连接件固定在底座转盘上,臂连接件,大臂,小臂转动连接,所述末端执行装置与小臂通过联轴器旋转连接。
4、进一步地,所述底盘为空心,内有加强筋,开有4个沉头螺丝孔,可通过沉头六角螺丝与巡检机器人固定,实现与巡检机器人共用轨道,或在固定位置进行单独固定部署,底盘与底座进行螺纹连接,四个沉头螺丝孔于底盘四角分布。
5、进一步地,所述底座内有电机安装槽位及电机固定螺丝孔位,可安装电机控制底座转盘旋转,实现与底座转盘的旋转连接,所述的电机安装槽位及电机固定螺丝孔位,于所述底座的中心线垂直异面布置,电机与底座螺纹连接固定,所述底座内安装的电机为伺服电机,以此实现机械臂的精确旋转角度以及路径规划。
6、进一步地,所述转盘下部有齿轮槽,可接合电机输出齿轮实现旋转,上部开有键槽以及若干固定螺丝孔,与臂连接件实现键连接;所述的键槽布置于转盘上表面,并垂直于圆盘直径,偏离圆心布置,主要起到承担径向力的作用;所述若干固定螺丝孔分布于所述键槽上表面,起到承担轴向力与部分径向力的作用,所述臂连接件底部有平键,上部开设孔位实现与及机械臂大臂连接。
7、进一步地,所述大臂由大臂外壳、大臂内壳两部分组成,两个外壳分开成型然后组装,提升大臂的整体强度。
8、进一步地,所述小臂一端负责与连接大臂连接,另一端与末端执行装置的前臂连接,所述小臂分为内外夹板连接构成,中部大部分为镂空设计,以达到减重效果;所述小臂内外夹板间设置有加强柱,以确保该部件达到使用强度。
9、进一步的,所述末端执行装置包括:前臂、摄像头、联轴器、机械爪底座、机械爪;所述前臂侧面有螺丝孔位与小臂连接,顶部有螺丝孔位与摄像头螺纹连接,前端有电机安装槽位;电机输出轴通过联轴器与底座连接件连接,所述的前臂内安装的电机为伺服电机,以此实现末端执行装置的精确旋转角度以及路径规划。
10、进一步地,所述机械爪包含爪基板、爪连杆、夹板、爪主轴、轴固定板、爪固定板、连接板组成;所述爪基板上端连接机械爪底座,爪主轴与爪基板连接,两个轴固定板分别安装在爪主轴与爪基板两侧,负责连接加固,连接板安装在爪主轴下方,与两个轴固定板连接加固;爪固定板安装于两个轴固定板正上方,负责爪连杆的安装位,四个爪连杆对称安装连接在爪固定板两侧,两个夹板与爪连杆对称连接。
11、本发明公开的有益效果:
12、本发明所述空地物料转载用摘钩装置;采用图像识别技术,提高煤矿设备的自动化程度,可以实现对作业区工况自动检测与摘钩作业的无人化,减少了人工操作,简化摘钩工作流程,提高效率;且该技术在低照度环境下仍能实现对目标的准确检测,适用于煤矿井下光线不足的情况,有助于提高安全性。
13、本发明中所述空地物料转载用摘钩装置可同时兼具井下巡检任务;所述末端执行装置的摄像头模块装备传感器,可实时监测井下的温度、湿度、瓦斯、粉尘等参数,及时发现异常情况,提高煤矿安全生产水平;若将本发明所述机械臂部署于特种巡检机器人可同时进行井下多角度无死角全方位的巡检任务,实现一臂多用。
技术特征:
1.一种空地物料转载用摘钩装置,其特征在于,包括底盘(1)、底座(2)、底座转盘(3)、臂连接件(4)、大臂(5)、小臂(6)、末端执行装置(7);其中大臂(5)、小臂(6)、末端执行装置(7)之间由可编程控制器(programmable logic control ler后文简写为plc)控制力矩电机运转,同时力矩电机的输出轴利用联轴器(703)与底座连接件(704)连接,为机械爪(706)提供驱动力,所述摘钩装置通过摄像头(702)抓取作业区图像信息,计算机通过图像识别技术对图像信息进行识别分析,由计算机做出决策,将分析得出的位置信息反馈给可编程控制器,执行空地物料转载场景下的摘钩作业。
2.根据权利要求1所述的一种空地物料转载用摘钩装置,所述底盘(1)开有4个沉头螺丝孔(101),底盘(1)与底座(2)进行螺纹连接,所述底座(2)内有电机安装槽位及电机固定螺丝孔位(201);所述转盘(3)下部有齿轮槽(301),上部开有键槽(302)以及螺丝孔(303),与臂连接件(4)实现键连接;所述臂连接件(4)底部有平键(401),上部开设孔位实现与及机械臂大臂(5)连接;所述大臂(5)由大臂外壳(501)、大臂内壳(502)两部分组成;所述小臂(6)一端负责与大臂(5)连接,另一端与末端执行装置(7)的前臂(701)连接。
3.根据权利要求1所述的一种空地物料转载用摘钩装置,所述末端执行装置(7)包括前臂(701)、摄像头(702)、联轴器(703)、底座连接件(704)、机械爪底座(705)、机械爪(706);所述前臂(701)侧面有4个螺丝孔位与小臂(6)连接,顶部有4个螺丝孔位与摄像头(702)连接,前端有电机安装槽位,电机输出轴通过联轴器(703)与底座连接件(704)连接,机械爪底座(705)与底座连接件(704)连接。
4.根据权利要求3所述的所述的一种空地物料转载用摘钩装置,所述机械爪(706)其特征在于:包含爪基板(7061)、爪连杆(7062)、夹板(7063)、爪主轴(7064)、轴固定板(7065)、爪固定板(7066)、连接板(7067),爪基板(7061)上端连接机械爪底座(705),爪主轴(7064)与爪基板(7061)连接,两个轴固定板(7065)分别安装在爪主轴(7064)与爪基板(7061)两侧,连接板(7067)安装在爪主轴(7064)下方,与两个轴固定板(7065)连接加固,爪固定板(7066)安装于两个轴固定板(7065)正上方,负责爪连杆(7062)的安装位,4个爪连杆(7062)对称安装连接在爪固定板(7066)两侧,两个夹板(7063)与爪连杆(7062)对称连接。
5.如权利要求1所述的空地物料转载用摘钩装置的使用方法,其特征在于:包括以下步骤:
技术总结
本发明涉及一种空地物料转载用摘钩装置及使用方法,包括底盘,底座,转盘,大臂,小臂,以及末端执行装置,机械臂底盘支架可连接于煤矿特种巡检机器人,能够在煤矿的复杂环境中进行单轨吊摘钩作业,减少人工,降低煤矿的安全隐患,提高煤矿的安全生产水平。该发明可以提高煤矿卸煤的效率和质量,减少人工劳动和人为错误,节约成本和时间,降低煤矿工人的劳动强度和安全风险,避免人员在危险区域进行摘钩操作,减少事故发生的可能性,保护工人的生命和健康,实现煤矿卸煤系统的智能化和自动化。
技术研发人员:靳华伟,蔡振宇,马天兵,沈刚,邓海顺,黄家海
受保护的技术使用者:安徽理工大学
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!