一种载货平台货物识别装置的制作方法
本发明涉及货物分选,更具体地说,涉及一种载货平台货物识别装置。
背景技术:
1、堆放拆垛是物流行业的动作术语,堆放作业是指把物品移动或举升到装运设备或固定设备的指定位置,再按所要求的状态放置的作业;而拆垛(卸下、卸出)作业则是堆放作业的逆向作业。
2、在物流领域内,栈板是一种活动的载货托盘,是使静态货物转变为动态货物的媒介物,方便堆垛货物运输。目前,叉车将多个栈板运输至载货平台后,需要通过人工操作机械手臂逐一对多个栈板上进行拆垛作业。在各栈板拆垛作业过程中,采用人工目测来定位栈板上货物位置,造成各栈板货物定位不准确,影响机械手臂准确抓取栈板上货物,进而影响拆垛效率。
3、综上所述,如何提高多个栈板上的货物拆垛效率,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、本发明的核心在于提供一种载货平台货物识别装置,通过视觉相机实现检测识别,从而自动地在两个栈板之间交替地完成拆垛操作,提升拆垛的效率,具体方案如下:
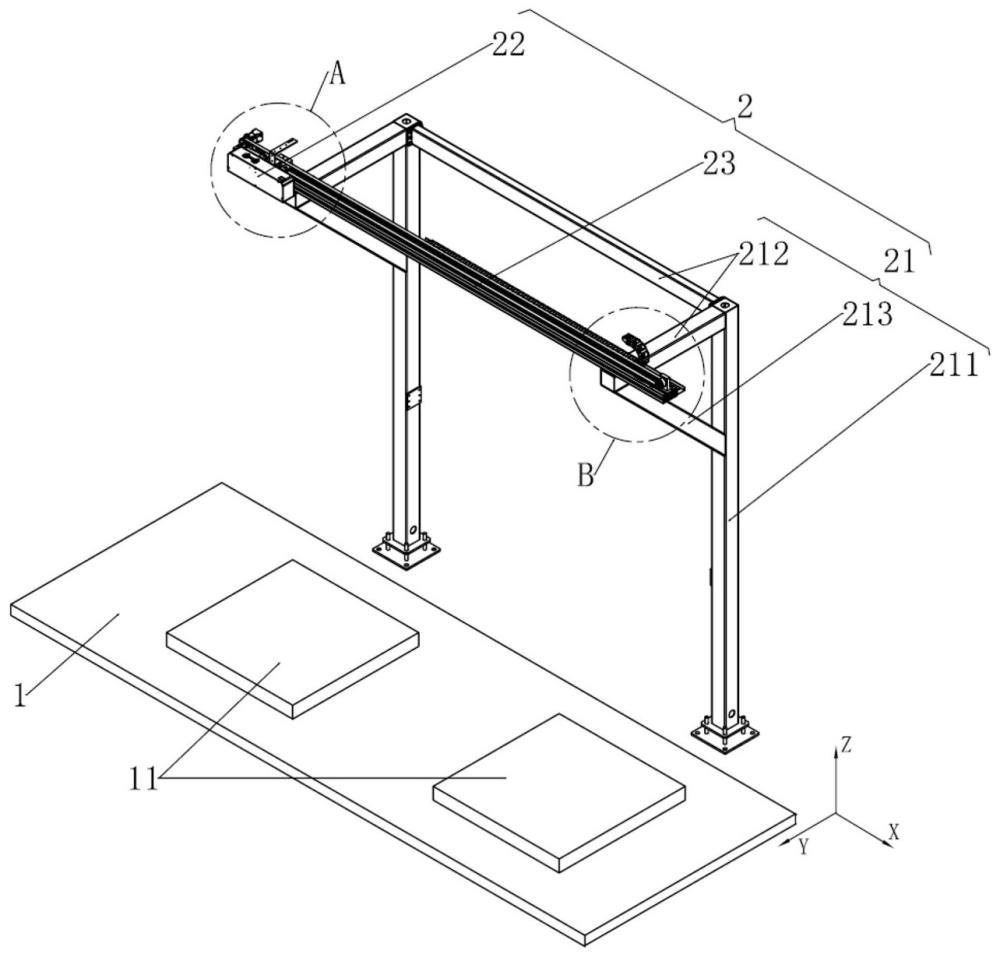
2、一种载货平台货物识别装置,包括载货平台和识别机构,所述载货平台能够承托至少两个栈板,每个所述栈板用于独立地承载货物;
3、所述识别机构包括支撑架和视觉相机,所述支撑架用于将所述视觉相机架设到所述载货平台的上方,所述视觉相机用于检测所述栈板上承载的货物,并用于将检测数据发送至控制器,作为机械臂从所述栈板拆垛的位置依据。
4、可选地,所述支撑架包括支撑柱和承托部,所述支撑柱至少设置两根,其底部固定于地面;
5、所述承托部呈水平设置,并固定于所述支撑柱,所述承托部的部分区域位于所述栈板的正上方;所述视觉相机安装于所述承托部;
6、所述承托部与所述支撑柱的转角处呈倾斜设置有加强柱。
7、可选地,所述识别机构包括安装于所述承托部的驱动组件,所述视觉相机安装于所述驱动组件的输出部,所述驱动组件驱动所述视觉相机移动,使所述视觉相机对某一个所述栈板识别时位于该所述栈板的正上方。
8、可选地,所述驱动组件包括导向梁、同步带和驱动 器,所述导向梁安装于所述承托部,所述驱动器装配于所述导向梁,所述视觉相机滑动安装于所述导向梁,所述导向梁用于引导所述视觉相机水平移动;
9、所述驱动器用于带动所述同步带转动,所述同步带用于带动所述视觉相机沿所述导向梁往复运动。
10、可选地,所述驱动器的输出轴安装主动轮,所述导向梁上安装被动轮,所述同步带安装于所述主动轮和所述被动轮上被张紧;
11、所述导向梁的侧方设置用于支撑拖链的拖链槽。
12、可选地,所述视觉相机设置有用于夹持所述同步带的夹块;
13、所述视觉相机设置有用于固定线缆的线缆支架。
14、可选地,所述驱动器为带有绝对值编码器的伺服电机,所述驱动器通过转动角度控制所述视觉相机的停止位置,并根据所述视觉相机的视觉检测数据判断是否正对所述栈板。
15、可选地,所述支撑柱为伸缩杆,能够调节所述识别机构的高度并定位固定。
16、可选地,所述机械臂设置于驱动地轨,以使所述机械臂在不同的所述栈板之间移动以拆垛其对应位置的所述栈板。
17、可选地,所述视觉相机保持固定设置,所述载货平台能够带动所述栈板水平移动,以使不同的所述栈板位于所述视觉相机的正下方以供识别。
18、本发明提供一种载货平台货物识别装置,其中载货平台能够承托至少两个栈板,每个栈板用于独立地承载货物;识别机构通过支撑架架设视觉相机,将视觉相机架设到载货平台的上方,以使视觉相机从上向下检测栈板上承载的货物,视觉相机将检测数据发送至控制器,作为机械臂从栈板拆垛的位置依据;机械臂将一个栈板上的货物全部拆垛取出后,对另一个栈板上的货物拆垛取出,在取货的同时可向没有被取货的栈板重新放置新的货物,从而实现交替循环拆垛。本发明通过相机识别的方式,实现栈板上货物位置的精准定位,作为精准抓取货物的依据,能够在不同的栈板之间交替的实现自动拆垛,提高多个栈板上的货物拆垛效率。
技术特征:
1.一种载货平台货物识别装置,其特征在于,包括载货平台(1)和识别机构(2),所述载货平台(1)能够承托至少两个栈板(11),每个所述栈板(11)用于独立地承载货物;
2.根据权利要求1所述的载货平台货物识别装置,其特征在于,所述支撑架(21)包括支撑柱(211)和承托部(212),所述支撑柱(211)至少设置两根,其底部固定于地面;
3.根据权利要求2所述的载货平台货物识别装置,其特征在于,所述识别机构(2)包括安装于所述承托部(212)的驱动组件(23),所述视觉相机(22)安装于所述驱动组件(23)的输出部,所述驱动组件(23)驱动所述视觉相机(22)移动,使所述视觉相机(22)对某一个所述栈板(11)识别时位于该所述栈板(11)的正上方。
4.根据权利要求3所述的载货平台货物识别装置,其特征在于,所述驱动组件(23)包括导向梁(231)、同步带(232)和驱动器(233),所述导向梁(231)安装于所述承托部(212),所述驱动器(233)装配于所述导向梁(231),所述视觉相机(22)滑动安装于所述导向梁(231),所述导向梁(231)用于引导所述视觉相机(22)水平移动;
5.根据权利要求4所述的载货平台货物识别装置,其特征在于,所述驱动器(233)的输出轴安装主动轮(234),所述导向梁(231)上安装被动轮(235),所述同步带(232)安装于所述主动轮(234)和所述被动轮(235)上被张紧;
6.根据权利要求4所述的载货平台货物识别装置,其特征在于,所述视觉相机(22)设置有用于夹持所述同步带(232)的夹块(221);
7.根据权利要求4所述的载货平台货物识别装置,其特征在于,所述驱动器(233)为带有绝对值编码器的伺服电机,所述驱动器(233)通过转动角度控制所述视觉相机(22)的停止位置,并根据所述视觉相机(22)的视觉检测数据判断是否正对所述栈板(11)。
8.根据权利要求2所述的载货平台货物识别装置,其特征在于,所述支撑柱(211)为伸缩杆,能够调节所述识别机构(2)的高度并定位固定。
9.根据权利要求3所述的载货平台货物识别装置,其特征在于,所述机械臂设置于驱动地轨,以使所述机械臂在不同的所述栈板(11)之间移动以拆垛其对应位置的所述栈板(11)。
10.根据权利要求1所述的载货平台货物识别装置,其特征在于,所述视觉相机(22)保持固定设置,所述载货平台(1)能够带动所述栈板(11)水平移动,以使不同的所述栈板(11)位于所述视觉相机(22)的正下方以供识别。
技术总结
本发明公开一种载货平台货物识别装置,涉及货物分选技术领域,其中载货平台能够承托至少两个栈板,每个栈板用于独立地承载货物;识别机构通过支撑架架设视觉相机,将视觉相机架设到载货平台的上方,以使视觉相机从上向下检测栈板上承载的货物,视觉相机将检测数据发送至控制器,作为机械臂从栈板拆垛的位置依据;机械臂将一个栈板上的货物全部拆垛取出后,对另一个栈板上的货物拆垛取出,在取货的同时可向没有被取货的栈板重新放置新的货物,从而实现交替循环拆垛。本发明通过相机识别的方式,实现栈板上货物位置的精准定位,作为精准抓取货物的依据,能够在不同的栈板之间交替的实现自动拆垛,提高多个栈板上的货物拆垛效率。
技术研发人员:李孟龙,邓鹏,曹辉,吴杰,赵光博,王赫
受保护的技术使用者:安徽省配天机器人集团有限公司
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!