臂架防撞系统、方法、装置、电子设备及起重机与流程
本申请涉及起重机,具体涉及一种臂架防撞系统、方法、装置、电子设备及起重机。
背景技术:
1、高架吊、门座、门机、起重机等臂架类设备中,难以采集到钢丝绳、臂架上的细小附件和遮挡区域的数据,由于臂架种类繁多,且同一臂架在不同负载与作业半径下的臂长和角度也会有所不同,对钢丝绳、臂架上的细小附件和遮挡区域进行数据采集会更加困难,影响臂架位置的精确识别,导致臂架防撞难以实现,造成安全隐患。
技术实现思路
1、基于上述现有技术的缺陷和不足,本申请提出一种臂架防撞系统、方法、装置、电子设备及起重机,能够通过设置在臂架后端不同侧面的激光雷达,全面地采集到起重机及障碍物的点云数据,起重机的点云数据包括臂架、相关部件以及立柱或旋转平台等点云,基于该点云数据精准地确定防撞区域,避免遮挡,从而较好地实现臂架防撞,避免安全隐患。
2、根据本申请实施例的第一方面,提供了一种臂架防撞系统,所述臂架防撞系统包括控制设备与多个激光雷达,所述控制设备与所述多个激光雷达通信连接;
3、其中,
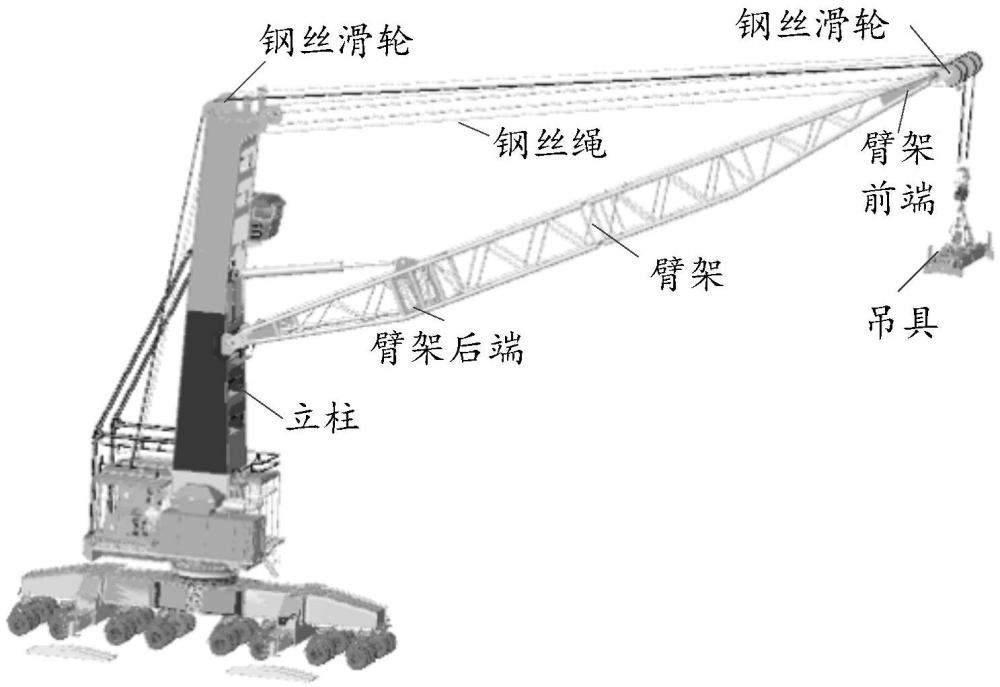
4、所述多个激光雷达,设置于起重机臂架的后端且位于所述臂架的不同侧面,用于对所述起重机和障碍物进行点云数据采集,并传输至所述控制设备,所述后端为所述臂架上远离所述起重机的吊具的一端;
5、所述控制设备,用于基于所述起重机的点云数据、安装于所述臂架上的相关部件相对于所述臂架的位置,确定防撞区域,并基于所述障碍物的点云数据,确定所述障碍物的位置,基于所述障碍物的位置与所述防撞区域的位置,控制所述臂架运动,以实现臂架防撞。
6、根据本申请实施例的第二方面,提供了一种臂架防撞方法,应用于如第一方面所述的臂架防撞系统中,所述方法包括:
7、通过位于起重机臂架不同侧面后端的多个激光雷达,获取起重机和障碍物的点云数据;
8、基于所述起重机的点云数据、安装于起重机的臂架上的相关部件相对于所述臂架的位置,确定防撞区域;
9、基于所述障碍物的点云数据确定障碍物的位置;
10、基于所述障碍物的位置与所述防撞区域的位置,控制所述臂架运动,以实现臂架防撞。
11、根据本申请实施例的第三方面,提供了一种臂架防撞装置,包括:
12、获取模块,用于通过位于起重机臂架不同侧面后端的多个激光雷达,获取起重机和障碍物的点云数据;
13、确定模块,用于基于所述起重机的点云数据、安装于起重机的臂架上的相关部件相对于所述臂架的位置,确定防撞区域;
14、确定模块,用于基于所述障碍物的点云数据确定障碍物的位置;
15、控制模块,用于基于所述障碍物的位置与所述防撞区域的位置,控制所述臂架运动,以实现臂架防撞。
16、根据本申请实施例的第三方面,提供了一种电子设备,包括存储器和处理器;
17、所述存储器与所述处理器连接,用于存储程序;
18、所述处理器用于通过运行所述存储器中的程序,实现如第二方面所述的臂架防撞方法。
19、根据本申请实施例的第四方面,提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时,实现如第二方面所述的臂架防撞方法。
20、根据本申请实施例的第五方面,提供了一种起重机,所述起重机中设置有如第一方面所述的臂架防撞系统。
21、上述臂架防撞系统、方法、装置、电子设备及起重机中,通过设置于起重机臂架后端各个侧面上的多个激光雷达,即臂架各个侧面上位于远离起重机吊具的一端的激光雷达,对起重机和障碍物进行点云采集,可以避免区域遮挡,采集到全面的起重机及障碍物的点云数据,并基于该点云数据,结合安装于臂架上的相关部件相对于臂架的位置,确定精准的防撞区域,之后,基于障碍物的位置和精准的防撞区域控制臂架运动,能够较好地实现臂架防撞,避免安全事故的发生,减少安全隐患。
技术特征:
1.一种臂架防撞系统,其特征在于,所述臂架防撞系统包括控制设备与多个激光雷达,所述控制设备与所述多个激光雷达通信连接;
2.一种臂架防撞方法,其特征在于,应用于如权利要求1所述的臂架防撞系统中,所述方法包括:
3.根据权利要求2所述的臂架防撞方法,其特征在于,所述起重机的点云数据包括臂架点云数据,基于所述起重机的点云数据、安装于起重机的臂架上的相关部件相对于所述臂架的位置,确定防撞区域,包括:
4.根据权利要求3所述的臂架防撞方法,其特征在于,基于所述目标点云数据、所述相关部件相对于所述臂架的位置,确定防撞区域,包括:
5.根据权利要求4所述的臂架防撞方法,其特征在于,所述臂架包括第一臂架,所述第一臂架的一端与所述起重机的立柱或旋转平台连接,基于所述目标点云数据,确定所述臂架的变幅角度,包括:
6.根据权利要求5所述的臂架防撞方法,其特征在于,所述臂架还包括第二臂架,所述第二臂架的两端分别与所述第一臂架和所述起重机的吊具连接,基于所述目标点云数据,确定所述臂架的变幅角度,还包括:
7.根据权利要求6所述的臂架防撞方法,其特征在于,所述基于所述臂架的变幅角度、所述相关部件相对于所述臂架的位置,确定所述相关部件对应的防撞区域,包括:
8.根据权利要求2-7中任一项所述的臂架防撞方法,其特征在于,所述基于所述障碍物的位置与所述防撞区域的位置,控制所述臂架运动,包括:
9.一种电子设备,其特征在于,包括存储器和处理器;
10.一种起重机,其特征在于,所述起重机中设置有如权利要求1所述的臂架防撞系统,所述臂架防撞系统包括多个激光雷达与如权利要求9所述的电子设备。
技术总结
本申请提供了一种臂架防撞系统、方法、装置、电子设备及起重机,该系统包括控制设备和与其通信连接的设置于起重机臂架的不同侧面后端的多个激光雷达,用于对起重机和障碍物进行点云采集并传输至控制设备,后端即臂架上远离起重机的吊具的一端,控制设备用于基于起重机的点云数据、安装于臂架上的相关部件相对于臂架的位置,确定防撞区域,并基于障碍物的点云数据确定障碍物的位置,基于障碍物的位置与防撞区域的位置,控制臂架运动。这样,通过设置在臂架后端各个侧面的激光雷达可全面采集到臂架的点云数据,避免区域遮挡,从而基于采集到的点云数据,结合相关部件相对于臂架的位置,精准确定防撞区域,从而较好地实现臂架防撞,避免安全隐患。
技术研发人员:薛乐,梁启华,朱林贵
受保护的技术使用者:三一海洋重工有限公司
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!