一种基于射频识别技术的人工智能叉车及控制方法与流程
本发明涉及射频识别,尤其是涉及一种基于射频识别技术的人工智能叉车及控制方法。
背景技术:
1、在企业中,仓储管理含有六大效率,首当其冲的是库存的准确性和可见性,其次就是仓库作业效率以及简化货架,拣货盘点等操作,这些因素决定了企业的经济效益,现在环境下,人工检验是主流作业流程,但是人工无法避免因疲劳状态等其他原因造成的误差,导致准确性降低,可靠性低,影响仓库工作效率等问题。
2、现有工业叉车只具备搬运货物功能,不具备检查货位或者所搬运货物的功能,无法查看货物的基本信息以及不能获取搬取货物的位置信息,这些都需要上述人工进行操作,无法自主提供给仓储作业人员,进行实时的跟踪管理。
3、考虑到射频识别技术(rfid)的广泛应用,因其可以将信息存储至芯片中,因此,急需一种基于射频识别技术的人工智能叉车,提高仓库作业效率。
技术实现思路
1、本发明的目的是提供一种基于射频识别技术的人工智能叉车及控制方法,通过与rfid自校验,形成自动核对作业信息并且将校验结果直接通知给仓储作业人员,避免了人工自校验,以提高作业准确率,简化了人工作业流程,大幅提高仓库作业效率。
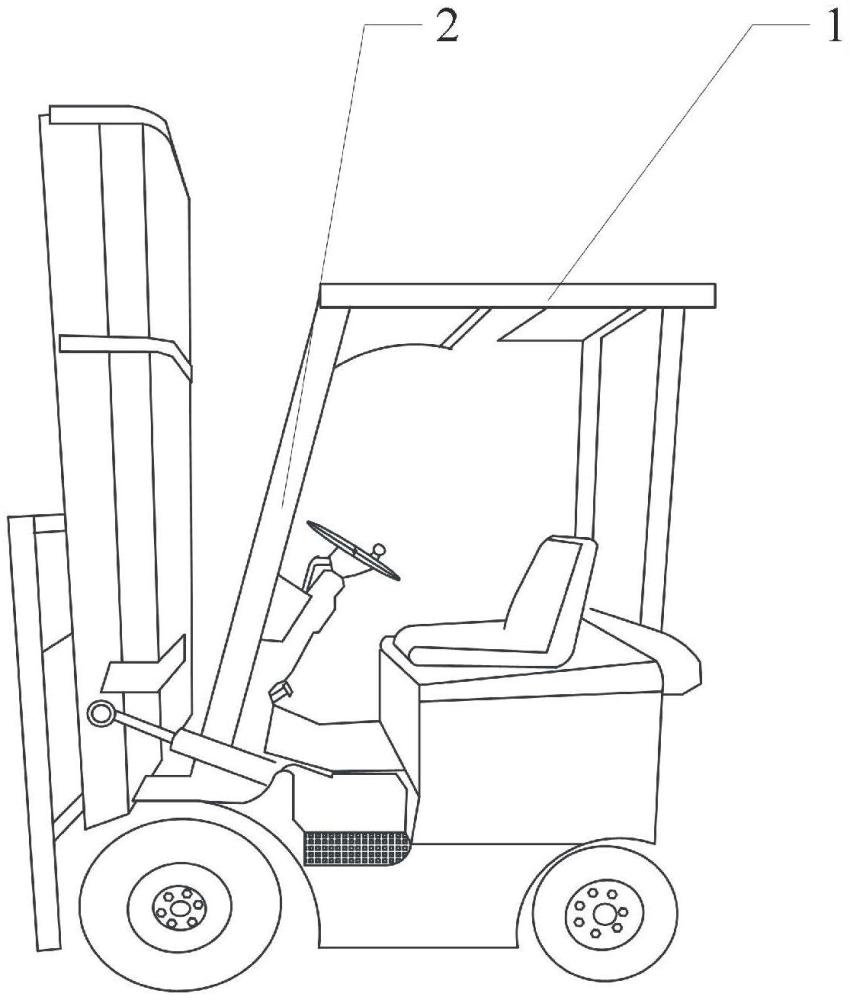
2、为实现上述目的,本发明提供了一种基于射频识别技术的人工智能叉车,包括车体主体,所述车体主体前端固定设置有门架,所述门架上滑动设置有第一货叉支架和第二货叉支架,所述第一货叉支架与所述第二货叉支架之间贯穿设置有支撑板,所述支撑板的贯穿端固定设置有牵引箱,所述牵引箱内固定设置有牵引电机,所述门架上安装有rfid读写器。
3、优选的,所述第一货叉支架和所述第二货叉支架结构相同,所述第一货叉支架和所述第二货叉支架均垂直设置,所述第一货叉支架和所述第二货叉支架的下端均固定设置有货叉。
4、优选的,所述第一货叉支架和所述第二货叉支架的中部均开设有与所述支撑板对应的贯穿孔。
5、优选的,所述牵引箱之间固定设置有滑轨,所述滑轨的两端与所述牵引箱外壁抵接。
6、优选的,所述rfid读写器上对撑设置有两个挂钩,所述挂钩与所述牵引箱对应,所述挂钩通过牵引绳所述牵引机连接。
7、优选的,所述车体主体内部设置有车载电脑,所述rfid读写器与所述车载电脑通过无线连接。
8、一种基于射频识别技术的人工智能叉车的控制方法,包括以下步骤:
9、s1、在货架或货品上贴上存储好信息的rfid标签,在车载电脑上输入所需要运输的货物信息,包括托盘和货位信息;
10、s2、通过无线服务将货物信息传输给服务器,服务器将货物的基本信息返回给车载电脑;
11、s3、rfid读写器将不断读取范围内的rfid标签,直到读写器读取到目标rfid标签信息,并将读取到的标签信息转发给服务器与车载电脑;
12、s4、将读取到的标签信息转换为货位、托盘进行任务对比。
13、优选的,步骤s4中,所述任务对比具体为:
14、s41、若读取到的rfid标签信息与当前任务货位或托盘相同时,则说明货位正确,允许继续任务,不触发报警装置,并进入下一步进行校验,读取托盘的rfid标签;
15、s42、若读取到的rfid标签信息与当前任务的货位或托盘不一致时,车载电脑会触发报警装置,并且在车载电脑端不允许继续进行任务的后续操作;
16、s43、车载电脑通过弹窗提醒当前货位或者托盘非本次任务所需,当离开错误货位时,rfid读写器重新进入读取状态,取消蜂鸣,直到读取到正确任务所需。
17、因此,本发明采用上述一种基于射频识别技术的人工智能叉车及控制方法,有益效果如下:
18、(1)本发明通过rfid芯片存储单元储存货位信息,再利用读写器进行读取,在作业时通过wms系统下发任务,确定任务作业货位,将读写器绑定在作业叉车上,通过手持设备中的websocket不断与rfid读写器通信,读取周围最近的货位信息,确保作业最终叉取的货品是该任务订单应获取的位置。
19、(2)本发明操作简洁易懂,降低了人工对于系统的学习成本,并且降低了作业误差,避免影响仓库信息错乱的情况。
20、(3)本发明通过车载电脑进行任务对比,节约人工校验环节,节省人力,同时提高仓库效率,提升生产经济效益。
21、(4)本发明自动化程度高无需人力维护,不会出现无故失效,影响生产的情况。
22、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于射频识别技术的人工智能叉车,其特征在于:包括车体主体,所述车体主体前端固定设置有门架,所述门架上滑动设置有第一货叉支架和第二货叉支架,所述第一货叉支架与所述第二货叉支架之间贯穿设置有支撑板,所述支撑板的贯穿端固定设置有牵引箱,所述牵引箱内固定设置有牵引电机,所述门架上安装有rfid读写器。
2.根据权利要求1所述的一种基于射频识别技术的人工智能叉车,其特征在于:所述第一货叉支架和所述第二货叉支架结构相同,所述第一货叉支架和所述第二货叉支架均垂直设置,所述第一货叉支架和所述第二货叉支架的下端均固定设置有货叉。
3.根据权利要求2所述的一种基于射频识别技术的人工智能叉车,其特征在于:所述第一货叉支架和所述第二货叉支架的中部均开设有与所述支撑板对应的贯穿孔。
4.根据权利要求3所述的一种基于射频识别技术的人工智能叉车,其特征在于:所述牵引箱之间固定设置有滑轨,所述滑轨的两端与所述牵引箱外壁抵接。
5.根据权利要求4所述的一种基于射频识别技术的人工智能叉车,其特征在于:所述rfid读写器上对撑设置有两个挂钩,所述挂钩与所述牵引箱对应,所述挂钩通过牵引绳所述牵引机连接。
6.根据权利要求5所述的一种基于射频识别技术的人工智能叉车,其特征在于:所述车体主体内部设置有车载电脑,所述rfid读写器与所述车载电脑通过无线连接。
7.一种如权利要求1-6任一项所述的基于射频识别技术的人工智能叉车的控制方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种基于射频识别技术的人工智能叉车的控制方法,其特征在于,步骤s4中,所述任务对比具体为:
技术总结
本发明公开了一种基于射频识别技术的人工智能叉车及控制方法,包括车体主体,所述车体主体前端固定设置有门架,所述门架上滑动设置有第一货叉支架和第二货叉支架,所述第一货叉支架与所述第二货叉支架之间贯穿设置有支撑板,所述支撑板的贯穿端固定设置有牵引箱,所述牵引箱内固定设置有牵引电机,所述门架上安装有RFID读写器。本发明采用上述的一种基于射频识别技术的人工智能叉车及控制方法,通过与RFID自校验,形成自动核对作业信息并且将校验结果直接通知给仓储作业人员,避免了人工自校验,以提高作业准确率,简化了人工作业流程,大幅提高仓库作业效率。
技术研发人员:王瑞波,王子涵,卫小建,孟东阁,段帅佳
受保护的技术使用者:北京东方国凯工业装备有限公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!