一种用于物流配送的智能搬运机器人及其存储装置
本发明涉及物流配送,具体涉及一种用于物流配送的智能搬运机器人及其存储装置。
背景技术:
1、众所周知,物流配送即从商品流通的经营方式看的一种商品流通方式,物流配送的智能搬运机器人即进行快递货物配送的人工智能机器人,伴随着网络购物浪潮的兴起,海量的货物亟待物流配送,为提高物流配送效率,降低人工成本,我们提出一种用于物流配送的智能搬运机器人及其存储装置。
2、经检索,中国专利申请号为cn202121734238.9的发明专利公开了一种智能物流配送机器人,其大致描述为,包括机器人本体和设置在机器人本体内部的控制单片机,机器人本体的前端面从左至右依次设置有操作面板、语音播放器、前高清摄像头、操作控制箱壳和指纹开关,机器人本体的上端面设置有旋转高清摄像头,机器人本体的前端面活动连接有多个均匀分布的储物抽屉,多个储物抽屉内侧壁的下方均设置有缓冲底座,缓冲底座的下端面固定连接有多个均匀分布的记忆弹簧,多个记忆弹簧的另一端均与储物抽屉内侧壁的底端固定连接,多个储物抽屉内侧壁四周的中部均开设有隐藏槽,四个隐藏槽的内侧壁均设置有限位板,储物抽屉前后左右的中部均设置有微型电控伸缩杆,微型电控伸缩杆的输出端贯穿储物抽屉并延伸至储物抽屉内壁外部与限位板固定连接,多个储物抽屉的后端面均固定连接有两个均匀分布的驱动连接杆,两个驱动连接杆的后端面与机器人本体固定连接,机器人本体的下端面固定连接有稳定底座,其在使用时,机器人本体前方的操作面板方便用户操作扫码与输入取号单号,语音播放器便于配送机器人发出指令指引用户顺利收取货物,前高清摄像头方便记录拍摄用户取货。
3、上述的现有技术方案虽然能够应用于物流智能配送环节,但是其形成行走的轮系结构的旋转直径较小,对于较为平整的道路行驶尚可,一旦道路上存在坑洼或障碍物时,难免会对其整体的行进造成影响,实用性有待进一步提高。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种用于物流配送的智能搬运机器人及其存储装置,其实现物流配送的同时整体设计更为合理,对道路的适用性得到了进一步加强,商品的配送的自动化程度进一步提高,闭环程度更高,实用性得到了进一步加强。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:一种用于物流配送的智能搬运机器人及其存储装置,包括机器人本体,还包括存储装置,所述机器人本体包括主体架,所述主体架内转动连接有左转储架和右转储架,所述左转储架和右转储架内均设置有多个储藏腔,所述存储装置包括多个存储盒,多个所述存储盒上均安装有单向挡板,多个存储盒内均固定连接有下移配重块,多个存储盒分别转动连接在多个所述存储腔内,主体架内固定连接有中柱架,所述中柱架上安装有居中机械臂,所述主体架上开设有取物口,所述取物口用于所述居中机械臂的伸出作业,主体架上转动连接有两个外轮廓轮,两个所述外轮廓轮外均设置有轮廓带,两个外轮廓轮内均安装有内锥齿环,主体架内安装有两个第一伺服电机,两个所述第一伺服电机的输出轴上均安装有驱动锥齿轮,两个所述驱动锥齿轮分别与两个内锥齿环啮合,主体架内安装有陀螺仪,用于维持主体架的整体姿态的稳定,主体架的左右两端均固定连接有半球罩,两个所述半球罩上均安装有取物半球门,两个半球罩内均铰接有电动伸缩杆,两个所述电动伸缩杆分别与两个所述取物半球门铰接。
5、优选的,所述居中机械臂包括转动架,所述转动架转动连接在所述中柱架上,且中柱架内安装有第二伺服电机,所述第二伺服电机用于转动架相对于中柱架的转动驱动,所述转动架上转动连接有中转架,且转动架上安装有用于中柱架相对于转动架转动驱动的第三伺服电机,所述中转架上安装有执行架,所述执行架上安装有辅助夹持组件,且中转架上安装有用于执行架相对于中转架转动驱动的第四伺服电机。
6、优选的,所述辅助夹持组件包括两个对移夹架,两个所述对移夹架上均固定连接有对移齿条,两个所述对移齿条均与所述执行架滑动连接,执行架上安装有第五伺服电机,所述第五伺服电机的输出轴上安装有外齿驱动轮,两个对移齿条均与所述外齿驱动轮啮合。
7、优选的,两个所述对移夹架中的一个对移夹架上开设有多个第一条安装口,两个所述对移夹架中的另一个对移夹架上开设有多个第二条安装口,多个所述第一条安装口内均转动连接有第一夹持辊,多个所述第二条安装口内均转动连接有第二夹持辊,两个对移夹架分别安装有第六伺服电机和第七伺服电机,所述第六伺服电机用于多个第一夹持辊的同步转动驱动,所述第七伺服电机用于多个第二夹持辊的同步转动驱动。
8、优选的,两个所述对移夹架内均分别转动连接有第一同步轴和第二同步轴,所述第一同步轴上安装有多个第一主动锥齿轮,多个所述第一主动锥齿轮均啮合有第一被动锥齿轮,多个所述第一被动锥齿轮分别与多个第一夹持辊固定连接,所述第二同步轴上安装有多个第二主动锥齿轮,多个所述第二主动锥齿轮均啮合有第二被动锥齿轮,多个所述第二被动锥齿轮分别与多个第二夹持辊固定连接,所述第六伺服电机和第七伺服电机均传动连接有驱动轴,两个所述驱动轴上分别固定连接有第一锥齿主轮和第二锥齿主轮,多个所述第一主动锥齿轮中的位于中间位置的一个第一主动锥齿轮与所述第一锥齿主轮啮合,多个所述第二主动锥齿轮中的位于中间位置的一个第二主动锥齿轮与所述第二锥齿主轮啮合。
9、优选的,所述单向挡板包括内单向挡板和外单向挡板,所述内单向挡板和外单向挡板均转动连接在所述存储盒内,且存储盒连接有内复位簧和外复位簧,所述内复位簧和外复位簧分别与内单向挡板匹配和外单向挡板匹配。
10、优选的,所述存储盒内安装有内电磁体和外电磁体,所述内单向挡板上和外单向挡板上均设置有铁块,两个所述铁块分别与所述内电磁体匹配和外电磁体匹配。
11、优选的,所述取物口内设置有弧形门,且主体架内安装有用于弧形门开启的第八伺服电机。
12、(三)有益效果
13、与现有技术相比,本发明提供了一种用于物流配送的智能搬运机器人及其存储装置,具备以下有益效果:
14、1.本发明中,通过机器人本体的设计,形成用于物流配送的智能搬运机器人的主体结构,整体设计更为合理,对道路的适用性得到了进一步加强。
15、2.本发明中,通过存储装置的设计,形成货物存储的空间,多个空间之间切换较为流畅方便,搭配左转储架和右转储架而形成较好的耦合效果,货物的配送的自动化程度得到了进一步提高,更为实用。
16、3.本发明中,通过居中机械臂的设计,方便货物装入存储装置过程中的自主作业,闭环程度更高,实用性得到了进一步加强。
技术特征:
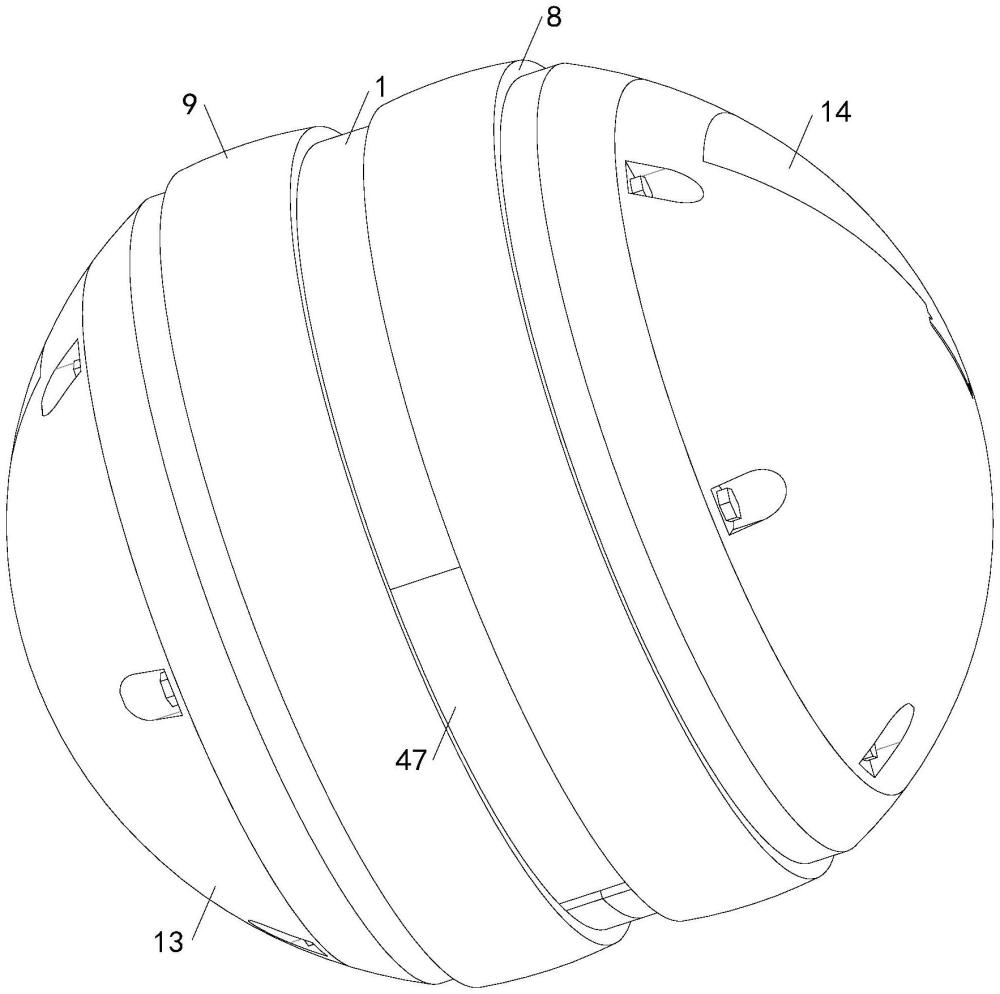
1.一种用于物流配送的智能搬运机器人及其存储装置,包括机器人本体,其特征在于,还包括存储装置,所述机器人本体包括主体架(1),所述主体架(1)内转动连接有左转储架(2)和右转储架(3),所述左转储架(2)和右转储架(3)内均设置有多个储藏腔,所述存储装置包括多个存储盒(4),多个所述存储盒(4)上均安装有单向挡板,多个存储盒(4)内均固定连接有下移配重块(5),多个存储盒(4)分别转动连接在多个所述存储腔内,主体架(1)内固定连接有中柱架(6),所述中柱架(6)上安装有居中机械臂,所述主体架(1)上开设有取物口(7),所述取物口(7)用于所述居中机械臂的伸出作业,主体架(1)上转动连接有两个外轮廓轮(8),两个所述外轮廓轮(8)外均设置有轮廓带(9),两个外轮廓轮(8)内均安装有内锥齿环(10),主体架(1)内安装有两个第一伺服电机(11),两个所述第一伺服电机(11)的输出轴上均安装有驱动锥齿轮(12),两个所述驱动锥齿轮(12)分别与两个内锥齿环(10)啮合,主体架(1)内安装有陀螺仪,用于维持主体架(1)的整体姿态的稳定,主体架(1)的左右两端均固定连接有半球罩(13),两个所述半球罩(13)上均安装有取物半球门(14),两个半球罩(13)内均铰接有电动伸缩杆,两个所述电动伸缩杆分别与两个所述取物半球门(14)铰接。
2.根据权利要求1所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,所述居中机械臂包括转动架(15),所述转动架(15)转动连接在所述中柱架(6)上,且中柱架(6)内安装有第二伺服电机(16),所述第二伺服电机(16)用于转动架(15)相对于中柱架(6)的转动驱动,所述转动架(15)上转动连接有中转架(17),且转动架(15)上安装有用于中柱架(6)相对于转动架(15)转动驱动的第三伺服电机(18),所述中转架(17)上安装有执行架(19),所述执行架(19)上安装有辅助夹持组件,且中转架(17)上安装有用于执行架(19)相对于中转架(17)转动驱动的第四伺服电机(20)。
3.根据权利要求2所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,所述辅助夹持组件包括两个对移夹架(21),两个所述对移夹架(21)上均固定连接有对移齿条(22),两个所述对移齿条(22)均与所述执行架(19)滑动连接,执行架(19)上安装有第五伺服电机(23),所述第五伺服电机(23)的输出轴上安装有外齿驱动轮(24),两个对移齿条(22)均与所述外齿驱动轮(24)啮合。
4.根据权利要求3所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,两个所述对移夹架(21)中的一个对移夹架(21)上开设有多个第一条安装口(25),两个所述对移夹架(21)中的另一个对移夹架(21)上开设有多个第二条安装口(26),多个所述第一条安装口(25)内均转动连接有第一夹持辊(27),多个所述第二条安装口(26)内均转动连接有第二夹持辊(28),两个对移夹架(21)分别安装有第六伺服电机(29)和第七伺服电机(30),所述第六伺服电机(29)用于多个第一夹持辊(27)的同步转动驱动,所述第七伺服电机(30)用于多个第二夹持辊(28)的同步转动驱动。
5.根据权利要求4所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,两个所述对移夹架(21)内均分别转动连接有第一同步轴(31)和第二同步轴(32),所述第一同步轴(31)上安装有多个第一主动锥齿轮(33),多个所述第一主动锥齿轮(33)均啮合有第一被动锥齿轮(34),多个所述第一被动锥齿轮(34)分别与多个第一夹持辊(27)固定连接,所述第二同步轴(32)上安装有多个第二主动锥齿轮(35),多个所述第二主动锥齿轮(35)均啮合有第二被动锥齿轮(36),多个所述第二被动锥齿轮(36)分别与多个第二夹持辊(28)固定连接,所述第六伺服电机(29)和第七伺服电机(30)均传动连接有驱动轴(37),两个所述驱动轴(37)上分别固定连接有第一锥齿主轮(38)和第二锥齿主轮(39),多个所述第一主动锥齿轮(33)中的位于中间位置的一个第一主动锥齿轮(33)与所述第一锥齿主轮(38)啮合,多个所述第二主动锥齿轮(35)中的位于中间位置的一个第二主动锥齿轮(35)与所述第二锥齿主轮(39)啮合。
6.根据权利要求5所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,所述单向挡板包括内单向挡板(40)和外单向挡板(41),所述内单向挡板(40)和外单向挡板(41)均转动连接在所述存储盒(4)内,且存储盒(4)连接有内复位簧(42)和外复位簧(43),所述内复位簧(42)和外复位簧(43)分别与内单向挡板(40)匹配和外单向挡板(41)匹配。
7.根据权利要求6所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,所述存储盒(4)内安装有内电磁体(44)和外电磁体(45),所述内单向挡板(40)上和外单向挡板(41)上均设置有铁块(46),两个所述铁块(46)分别与所述内电磁体(44)匹配和外电磁体(45)匹配。
8.根据权利要求7所述的一种用于物流配送的智能搬运机器人及其存储装置,其特征在于,所述取物口(7)内设置有弧形门(47),且主体架(1)内安装有用于弧形门(47)开启的第八伺服电机(48)。
技术总结
本发明涉及物流配送技术领域,提出了一种用于物流配送的智能搬运机器人及其存储装置,其实现物流配送的同时整体设计更为合理,对道路的适用性得到了进一步加强,商品的配送的自动化程度进一步提高,闭环程度更高,实用性得到了进一步加强,包括机器人本体和存储装置,机器人本体包括主体架,主体架内转动连接有左转储架和右转储架,左转储架和右转储架内均设置有多个储藏腔,存储装置包括多个存储盒,多个存储盒上均安装有单向挡板,多个存储盒内均固定连接有下移配重块,多个存储盒分别转动连接在多个存储腔内,主体架内固定连接有中柱架,中柱架上安装有居中机械臂,主体架上开设有取物口,取物口用于居中机械臂的伸出作业。
技术研发人员:朱凯,陈志才,傅瑜,李丽,杨霖,王奎洋
受保护的技术使用者:江苏理工学院
技术研发日:
技术公布日:2024/9/23
- 还没有人留言评论。精彩留言会获得点赞!