一种套管扶正器抓取装置及抓取机器人的制作方法
本发明涉及石油天然气钻井,尤其涉及一种套管扶正器抓取装置及抓取机器人。
背景技术:
1、在石油天然气钻井的要求中,固井是石油勘探开发系统工程中极为重要的一环,固井质量不仅关系到钻井的速度和成本,还将影响到油、气井的顺利生产及寿命,甚至油气藏的采收率。套管是固井的重要工具,其用于支撑油、气井井壁,加固井壁防止坍塌,以保证钻井过程进行和完井后整个油井的正常运行,套管居中是保证固井质量的重要前提,如果套管居中度差,会给固井施工带来诸多问题,严重影响固井质量。套管扶正器的作用是使套管在井眼内居中,保证固井时水泥浆均匀凝固在套管与井壁所形成的环形空间内,从而提高固井质量。
2、现阶段,随着石油钻井作业机械化水平的提高,各种机械化钻具操作设备(如顶驱、铁钻工、自动排管机、钻台面机械手等)被越来越广泛地应用。但传统的套管扶正器搬运和安装还是需要钻台面工人完成,不仅劳动强度大、效率低,而且作业过程中存在安全隐患。
3、故亟需一种安全性高以及作业效率高的套管扶正器抓取装置及抓取机器人。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种套管扶正器抓取装置及抓取机器人,其解决了现有技术通过人工搬运和安装套管扶正器导致作业效率低以及存在安全隐患的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
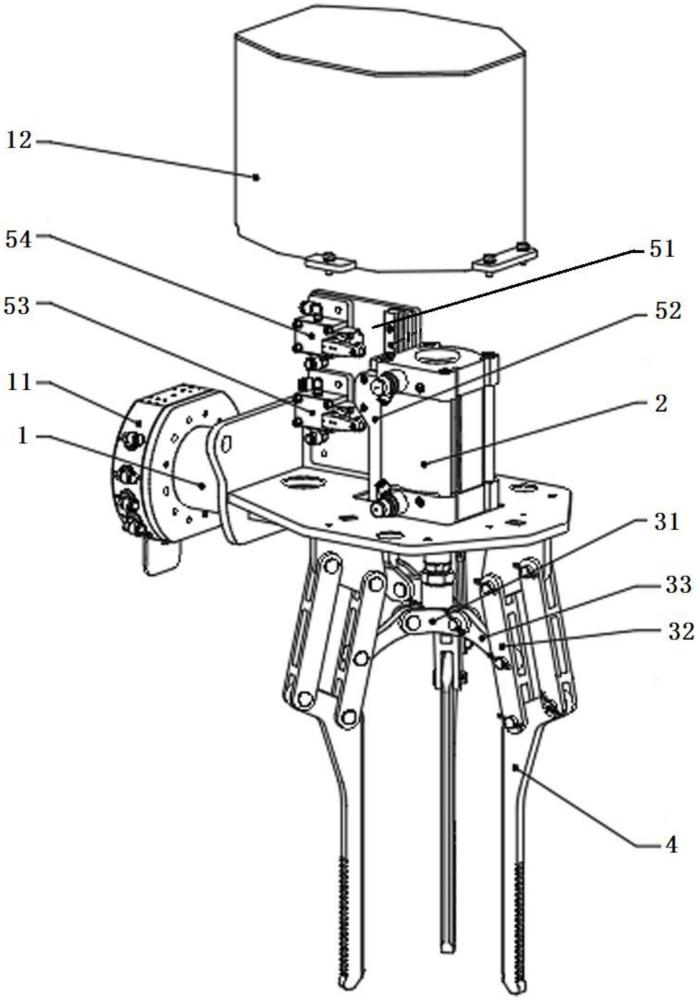
5、一方面,本发明提供一种套管扶正器抓取装置,包括支架、夹爪驱动器、传动组件、爪臂、夹爪检测总成和控制中心;所述夹爪驱动器和所述夹爪检测总成安装于所述支架顶部,所述爪臂通过所述传动组件可转动地安装于所述支架底部,所述夹爪驱动器和所述夹爪检测总成与所述传动组件连接,所述夹爪驱动器和所述夹爪检测总成信号连接所述控制中心;所述夹爪驱动器能够通过所述传动组件驱动所述爪臂张开抓取套管扶正器,或者闭合释放所述套管扶正器;所述爪臂完全张开或者完全闭合时,通过所述传动组件能够触发所述夹爪检测总成向所述控制中心发送信号。
6、可选地,所述夹爪检测总成包括主体和触发杆;所述主体信号连接所述控制中心,所述主体设有张开机械阀和闭合机械阀,所述张开机械阀或者所述闭合机械阀的阀门触发时,所述主体能够向所述控制中心发送信号;所述触发杆可滑动地安装于所述主体,所述触发杆的一端连接所述传动组件;所述爪臂完全张开时,所述传动组件能够带动所述触发杆滑动至触发所述张开机械阀的阀门,所述爪臂完全闭合时,所述传动组件能够带动所述触发杆滑动至触发所述闭合机械阀的阀门。
7、可选地,所述张开机械阀和所述闭合机械阀位于所述主体的第一侧部;所述触发杆可滑动地安装于所述第一侧部,所述触发杆上具有凸台,所述凸台位于所述张开机械阀和所述闭合机械阀的阀门之间;所述传动组件能够带动所述触发杆滑动至所述凸台触发所述张开机械阀的阀门或者所述闭合机械阀的阀门。
8、可选地,所述传动组件包括传动接头和连杆组件;所述连杆组件可转动地安装于所述支架底部,所述夹爪驱动器连接于所述传动接头,所述传动接头通过所述连杆组件可转动地连接于所述爪臂;所述传动接头连接所述夹爪检测总成。
9、可选地,所述连杆组件包括两个摆杆和一个推杆;所述爪臂通过平行设置的两个所述摆杆可转动地安装于所述支架底部,所述传动接头通过所述推杆可转动地连接位于内侧的所述摆杆;所述夹爪驱动器能够驱动所述传动接头上下移动,所述传动接头经所述推杆能够驱动所述摆杆在竖直面内转动,进而实现所述爪臂的张开和闭合。
10、可选地,所述支架、所述爪臂与两个所述摆杆形成平行四边形结构;位于外侧的所述摆杆在所述支架与所述爪臂上的安装高度比位于内侧的所述摆杆更高。
11、可选地,所述支架的侧部具有快换安装件,所述快换安装件能够与所述机械臂实现快速安装和拆卸。
12、可选地,所述爪臂的外侧开设有多个横向的限位槽,多个所述限位槽沿所述爪臂的长度方向均匀分布;所述爪臂的末端具有向外的凸部。
13、可选地,所述支架的顶部还设有保护所述夹爪驱动器和所述夹爪检测总成的护罩。
14、另一方面,本发明还提供一种套管扶正器抓取机器人,包括上述套管扶正器抓取装置以及所述机械臂;所述支架安装于所述机械臂。
15、(三)有益效果
16、本发明的有益效果是:
17、本发明提供的一种套管扶正器抓取装置,其能够安装于钻台面的机械臂,爪臂伸入套管扶正器后,通过控制中心控制夹爪驱动器驱动传动组件带动爪臂张开抓取套管扶正器,不触发夹爪检测总成则判断抓取成功;若爪臂完全张开,通过传动组件能够触发夹爪检测总成向控制中心发送信号,控制中心接收信号后则判断没有抓到套管扶正器,然后重新抓取;释放套管扶正器,驱动器经传动组件驱动夹爪完全闭合时,通过传动组件能够触发夹爪检测总成向控制中心发送信号,控制中心接收信号后判断已经释放套管扶正器,由此实现套管扶正器的抓取和释放。相比于现有技术,其能够与钻台面机械臂配合实现套管扶正器的抓取—搬运—释放的一体化作业;而且通过夹爪检测总成能够判断是否成功抓取或释放套管扶正器,做到无人化作业,大大降低工人劳动强度,作业效率和安全性都有极大提高。
技术特征:
1.一种套管扶正器抓取装置,其特征在于,
2.如权利要求1所述的套管扶正器抓取装置,其特征在于,
3.如权利要求2所述的套管扶正器抓取装置,其特征在于,
4.如权利要求1所述的套管扶正器抓取装置,其特征在于,
5.如权利要求4所述的套管扶正器抓取装置,其特征在于,
6.如权利要求5所述的套管扶正器抓取装置,其特征在于,
7.如权利要求1所述的套管扶正器抓取装置,其特征在于,
8.如权利要求1所述的套管扶正器抓取装置,其特征在于,
9.如权利要求1所述的套管扶正器抓取装置,其特征在于,
10.一种套管扶正器抓取机器人,其特征在于,包括权利要求1-9任一项所述的套管扶正器抓取装置以及所述机械臂(6);
技术总结
本发明涉及一种套管扶正器抓取装置及抓取机器人,包括支架、夹爪驱动器、传动组件、爪臂、夹爪检测总成和控制中心;所述夹爪驱动器和所述夹爪检测总成安装于所述支架顶部,所述爪臂通过所述传动组件可转动地安装于所述支架底部,所述夹爪驱动器和所述夹爪检测总成与所述传动组件连接,所述夹爪驱动器和所述夹爪检测总成信号连接所述控制中心;所述夹爪驱动器能够通过所述传动组件驱动所述爪臂张开抓取套管扶正器,或闭合释放所述套管扶正器;所述爪臂完全张开或者完全闭合时,通过所述传动组件能够触发所述夹爪检测总成向所述控制中心发送信号,其有益效果是,能够配合机械臂实现套管扶正器的抓取—搬运—释放一体化作业,作业效率和安全性更高。
技术研发人员:王学君,张义,孙梦阳,乔伟
受保护的技术使用者:北京捷杰西科技股份有限公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!