一种晶圆自动搬运车的制作方法
本发明涉及半导体搬运加工设备,具体为一种晶圆自动搬运车。
背景技术:
1、晶圆搬运天车是一种在半导体制造厂中用于自动化搬运晶圆的高精度设备,通常被称为空中走行式搬送车或自动物料搬运系统,晶圆搬运天车系统由多个复杂组件构成,包括硬件设备和软件系统,硬件部分主要有导轨、吊车、载具和控制系统。吊车沿安装在厂房天花板上的轨道移动,负责抓取和放置物料。载具则是用于承载和保护物料(如晶圆盒)的专用容器。
2、因此,基于现有的在实际使用时,在搬运量大的晶圆公司中晶圆搬运天车往往需要频繁的工作,但一般只会设计一个运输轨道,使得当有晶圆搬运天车在这个轨道里工作时,后方的晶圆搬运天车需要等待前方的晶圆搬运天车工作完毕后才能进行工作,浪费不必要的时间,同时当有晶圆搬运天车产生故障搁置在运输轨道上时会严重影响晶圆搬运天车运输,此外因为晶圆搬运天车在实际使用时需要等待前车移动后才能继续作业,为了提高晶圆搬运天车的运输效率往往需要对多个晶圆搬运天车的运行轨道进行数据计算得出最优路线,但轨道运行路线程序会导致使用成本直线上升,并且最优路线并不等于最快路线,为此,我们提出一种晶圆自动搬运车。
技术实现思路
1、针对现有技术的不足,本发明提供了一种晶圆自动搬运车,具备运输效率高成本低等优点,解决了晶圆运输效率低和成本高等系列问题。
2、为实现上述目的,本发明提供如下技术方案:一种晶圆自动搬运车,包括,
3、吊车,所述吊车用于运输晶圆,所述吊车包括固定在半空中的两个导轨,两个导轨的内部滑动有吊壳,所述吊壳的内部设置有第二升降机构,所述第二升降机构包括滑动连接在吊壳底部的固定板,所述固定板的底部固定卡接有晶圆箱;
4、驱动机构,所述驱动机构用于驱动吊壳在导轨的长度方向上移动,所述驱动机构设置有两组分别设置在吊壳的两侧,所述驱动机构包括滚动在吊壳一侧的两个驱动滚轮,所述驱动滚轮摩擦转动在相近的导轨的顶部,所述驱动滚轮靠近吊壳的一侧固定连接有传动杆,所述吊壳的两侧均开设有两个滑动槽,所述滑动槽的内部滑动连接有滑动块,所述传动杆转动连接在相近的滑动块的内部,并延伸至滑动块的另一侧;
5、第一升降机构,所述第一升降机构用于驱动吊壳上升或下降,从而能够在前方的吊车进行工作时不影响后方的吊车的移动,提高工作效率的同时降低路线规划难度,所述第一升降机构设置有两组,两组所述第一升降机构呈对称布置,所述第一升降机构包括固定连接在两个滑动块的相对一侧的固定杆,所述固定杆的左侧固定连接有泵壳,所述泵壳的内部转动连接有从动泵轮和主动泵轮,所述从动泵轮与主动泵轮相啮合,所述传动杆转动连接在泵壳内部,所述主动泵轮固定套接在传动杆外部,所述吊壳的内壁底部固定安装有油箱,所述油箱的内部注有液压油,所述油箱的两侧均相连通有出油管,所述出油管的输出端与相近的泵壳的输入端相连通,两个所述传动杆的相对一侧转动连接有同一个滑动板,所述吊壳的内部固定连接有四个限位架,四个所述限位架的内壁顶部均固定安装有液压囊,四个所述液压囊的底部均与滑动板的顶部固定连接,每两个液压囊的相对一侧相连通有一个连通管,所述泵壳的输出端相连通有泵油管,所述泵油管的输出端与相近的液压囊的一侧相连通,两个中间的限位架的相对一侧均相连通有回油管和泄压管,所述回油管和泄压管的输出端均与油箱相连通,所述回油管的外部固定安装有回油阀,所述泄压管的外部固定安装有泄压阀。
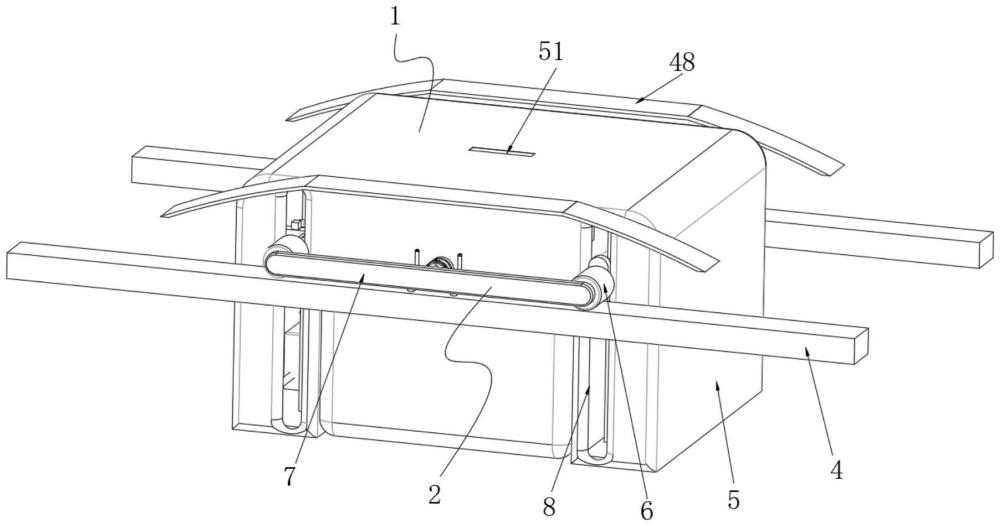
6、优选地,所述驱动机构还包括滑动连接在导轨顶部的防护壳,所述防护壳的内部转动连接有两个转动杆,两组驱动机构内部的两个驱动滚轮的一侧分别与相近的转动杆的一侧固定连接,所述转动杆的外部固定套接有传动链轮,所述防护壳的一侧固定连接有安装座,所述安装座的顶部固定安装有驱动电机,所述驱动电机的输出端固定连接有驱动链轮,同一组所述驱动机构内部的两个传动链轮与驱动链轮的外部转动套接有同一个驱动链条,所述吊壳的两侧均固定连接有避让桥。
7、优选地,所述安装座的底部固定连接有伸缩杆,所述伸缩杆设置有四个呈两两对称布置,所述伸缩杆的延伸端固定连接有第一转动块,两个第一转动块的相对一侧转动连接有同一个第一滚轮,所述第一滚轮的外部摩擦转动在相近的导轨的顶部。
8、优选地,所述第二升降机构还包括固定安装在吊壳内部一侧的升降电机,所述升降电机设置有两个,所述升降电机的输出端固定连接有升降轴,所述升降轴的外部固定连接有升降绳,所述升降绳缠绕在升降轴的外部,所述吊壳的内壁底部开设有四个升降槽。
9、优选地,四个所述升降绳的一端均穿过相近的升降槽并延伸至吊壳的底部与所述固定板的顶部固定连接,所述吊壳的内壁底部固定连接有四个第二转动块,四个第二转动块的内部均转动连接有第二滚轮,四个所述第二滚轮的外部均与相近的升降绳的外部抵接。
10、优选地,所述吊壳的内壁底部固定连接有四个定位板,所述定位板的内部固定安装有伸缩气缸,所述伸缩气缸的伸展端固定安装有第三转动块,所述第三转动块的内部转动连接有第三滚轮,所述第三滚轮的外部与相近的升降绳的外抵接。
11、优选地,所述吊壳的内壁底部固定连接有电控单元,所述吊壳的顶部固定安装有水平传感器,所述固定板的内部固定安装有角度传感器。
12、优选地,所述安装座的顶部固定连接有两个安装杆,两个安装杆的顶部均固定安装有压力传感器,两个压力传感器的检测端均与相近的避让桥的底部相适配。
13、与现有技术相比,本发明提供了一种晶圆自动搬运车,具备以下有益效果:
14、1、该发明通过设置的驱动机构,使得吊车能够沿着导轨的长度方向移动对晶圆进行运输,通过设置的驱动机构与第一升降机构联动,使得吊车能够在移动时位于导轨的上方,当吊车停止时位于导轨的下方,从而能够实现移动的吊车从静止的吊车的顶部经过而不发生碰撞,提高吊车的工作效率并降低吊车的使用成本。
15、2、该发明通过设置的驱动机构与第一升降机构联动,当某一个吊车出现故障搁置在导轨上时,不会影响正在工作中的其余吊车,提高吊车作业的工作效率,同时能够更加简单并合理的对吊车的运动轨迹做出选择。
16、3、该发明通过设置的第一升降机构与第二升降机构联动,能够控制吊车与晶圆箱一直处于水平状态,避免吊车与晶圆箱倾斜,使晶圆箱内部的晶圆一直处于水平状态,使晶圆整体受力面的受力力度统一避免晶圆发生破裂。
技术特征:
1.一种晶圆自动搬运车,其特征在于:包括,
2.根据权利要求1所述的一种晶圆自动搬运车,其特征在于:所述驱动机构(2)还包括滑动连接在导轨(4)顶部的防护壳(7),所述防护壳(7)的内部转动连接有两个转动杆(10),两组驱动机构(2)内部的两个驱动滚轮(6)的一侧分别与相近的转动杆(10)的一侧固定连接,所述转动杆(10)的外部固定套接有传动链轮(11),所述防护壳(7)的一侧固定连接有安装座(12),所述安装座(12)的顶部固定安装有驱动电机(13),所述驱动电机(13)的输出端固定连接有驱动链轮(14),同一组所述驱动机构(2)内部的两个传动链轮(11)与驱动链轮(14)的外部转动套接有同一个驱动链条(15),所述吊壳(5)的两侧均固定连接有避让桥(48)。
3.根据权利要求2所述的一种晶圆自动搬运车,其特征在于:所述安装座(12)的底部固定连接有伸缩杆(16),所述伸缩杆(16)设置有四个呈两两对称布置,所述伸缩杆(16)的延伸端固定连接有第一转动块(17),两个第一转动块(17)的相对一侧转动连接有同一个第一滚轮(18),所述第一滚轮(18)的外部摩擦转动在相近的导轨(4)的顶部。
4.根据权利要求1所述的一种晶圆自动搬运车,其特征在于:所述第二升降机构(3)还包括固定安装在吊壳(5)内部一侧的升降电机(35),所述升降电机(35)设置有两个,所述升降电机(35)的输出端固定连接有升降轴(36),所述升降轴(36)的外部固定连接有升降绳(37),所述升降绳(37)缠绕在升降轴(36)的外部,所述吊壳(5)的内壁底部开设有四个升降槽(38)。
5.根据权利要求4所述的一种晶圆自动搬运车,其特征在于:四个所述升降绳(37)的一端均穿过相近的升降槽(38)并延伸至吊壳(5)的底部与所述固定板(49)的顶部固定连接,所述吊壳(5)的内壁底部固定连接有四个第二转动块(39),四个第二转动块(39)的内部均转动连接有第二滚轮(40),四个所述第二滚轮(40)的外部均与相近的升降绳(37)的外部抵接。
6.根据权利要求5所述的一种晶圆自动搬运车,其特征在于:所述吊壳(5)的内壁底部固定连接有四个定位板(41),所述定位板(41)的内部固定安装有伸缩气缸(42),所述伸缩气缸(42)的伸展端固定安装有第三转动块(43),所述第三转动块(43)的内部转动连接有第三滚轮(44),所述第三滚轮(44)的外部与相近的升降绳(37)的外抵接。
7.根据权利要求6所述的一种晶圆自动搬运车,其特征在于:所述吊壳(5)的内壁底部固定连接有电控单元(45),所述吊壳(5)的顶部固定安装有水平传感器(51),所述固定板(49)的内部固定安装有角度传感器。
8.根据权利要求2所述的一种晶圆自动搬运车,其特征在于:所述安装座(12)的顶部固定连接有两个安装杆(46),两个安装杆(46)的顶部均固定安装有压力传感器(47),两个压力传感器(47)的检测端均与相近的避让桥(48)的底部相适配。
技术总结
本发明涉及半导体搬运加工设备技术领域,公开了一种晶圆自动搬运车,包括驱动机构、第一升降机构联动和第二升降机构联动,设置的驱动机构与第一升降机构联动,使得吊车能够在移动时位于导轨的上方,当吊车停止时位于导轨的下方,从而能够实现移动的吊车从静止的吊车的顶部经过而不发生碰撞,提高吊车的工作效率,设置的驱动机构与第一升降机构联动,当某一个吊车出现故障搁置在导轨上时,不会影响正在工作中的其余吊车,提高吊车作业的工作效率,设置的第一升降机构与第二升降机构联动,能够控制吊车与晶圆箱一直处于水平状态,使晶圆箱内部的晶圆一直处于水平状态,使晶圆整体受力面的受力力度统一避免晶圆发生破裂。
技术研发人员:孙彩霞,肖锦成,龚义
受保护的技术使用者:苏州尊恒半导体科技有限公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!